运算方法和运算器
2020-03-06 14:10
1711 查看
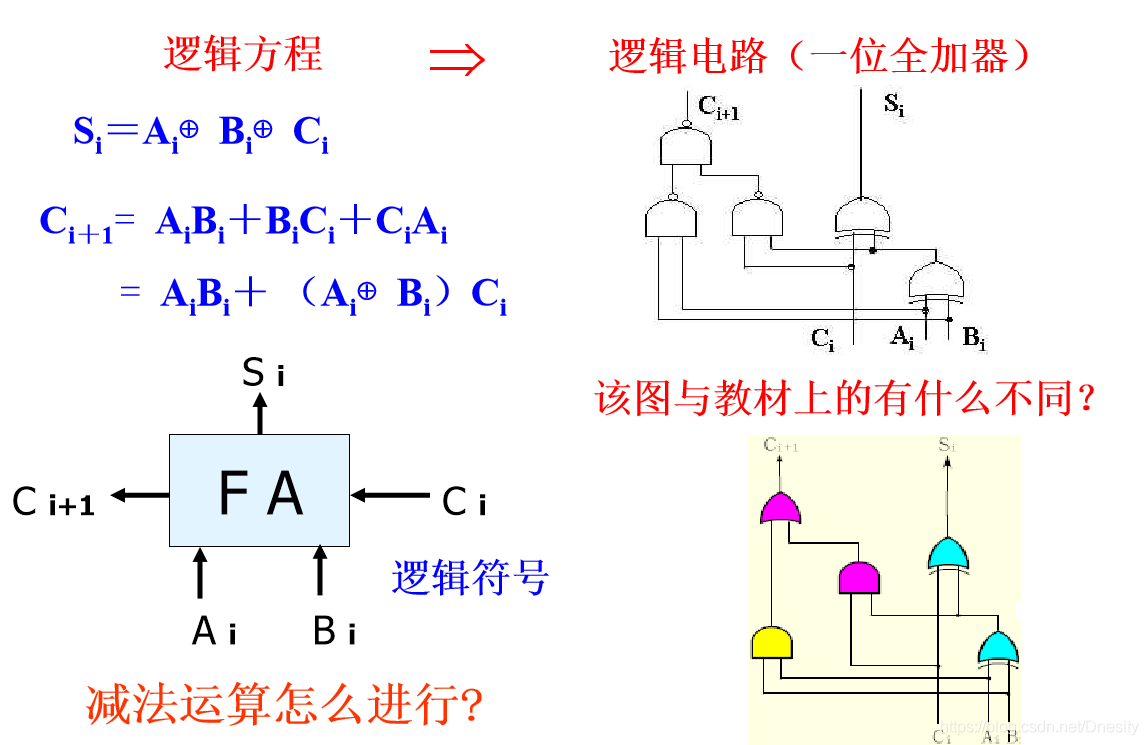
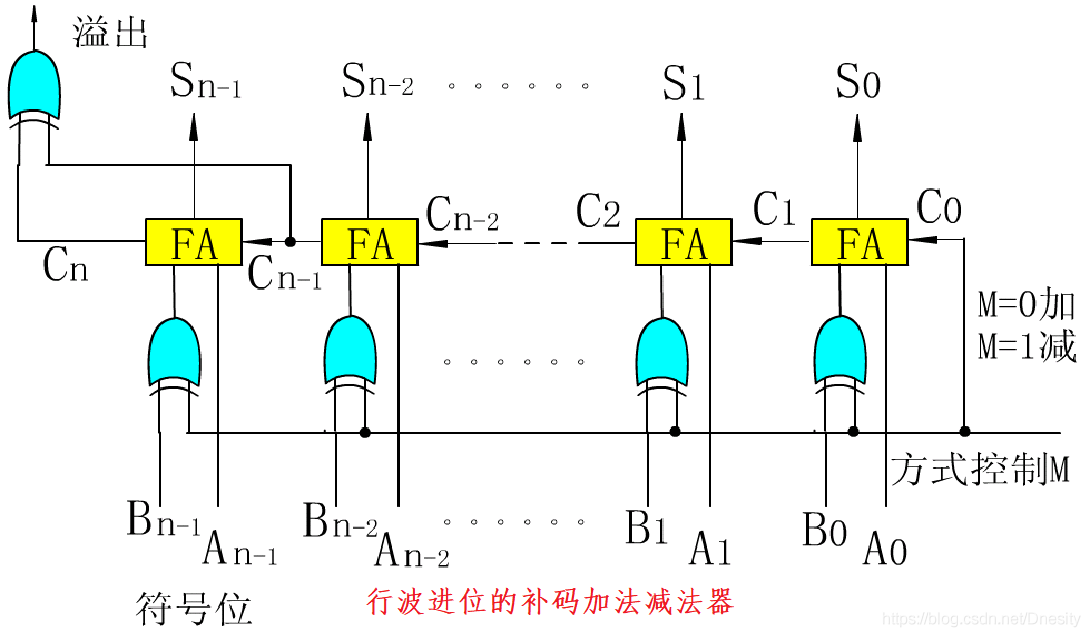
一、基本的二进制加法/减法器
半加器
 不考虑进位
不考虑进位
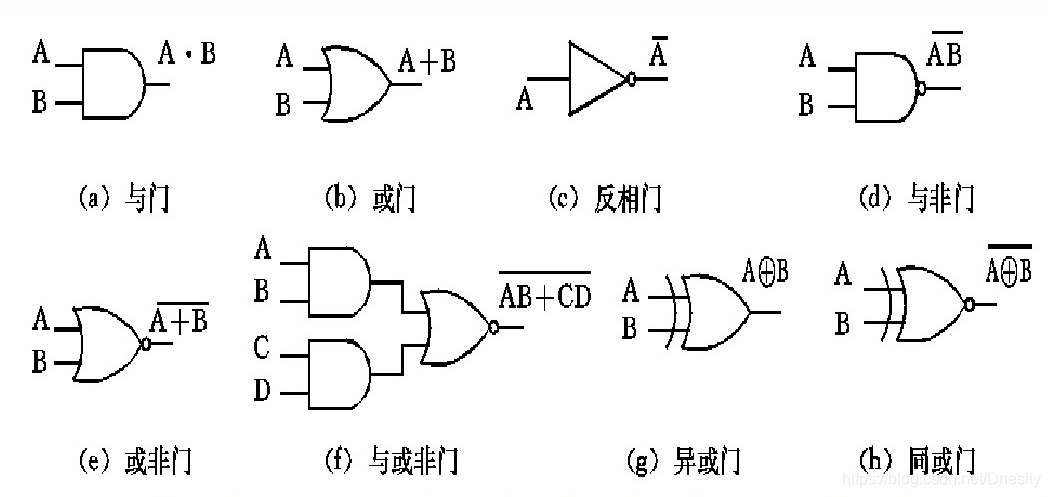
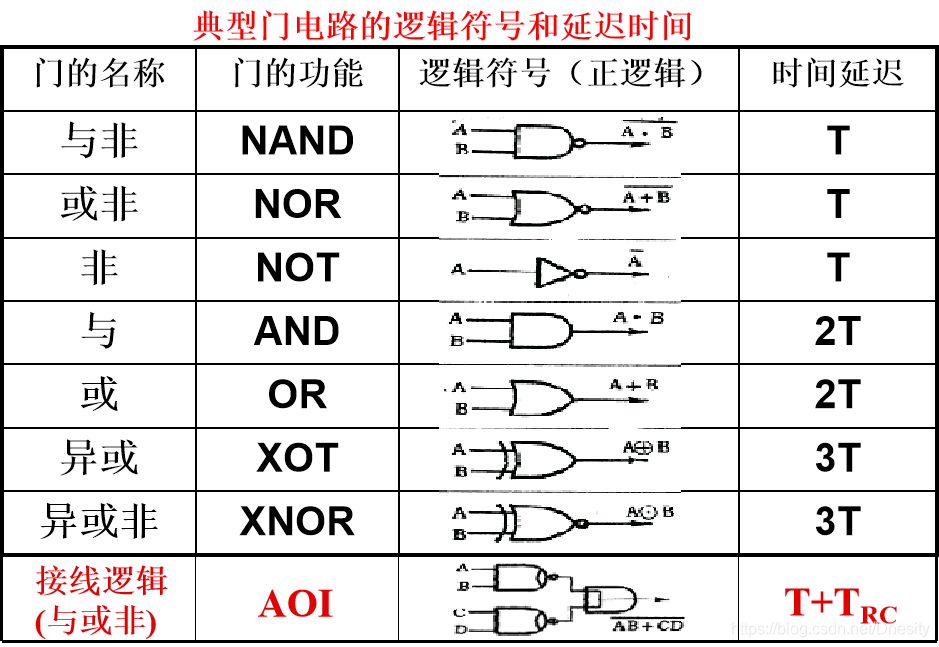
 各种逻辑门的图形符号
各种逻辑门的图形符号
 1.一位全加器
1.一位全加器

 机器与人们习惯的算法不同之处:
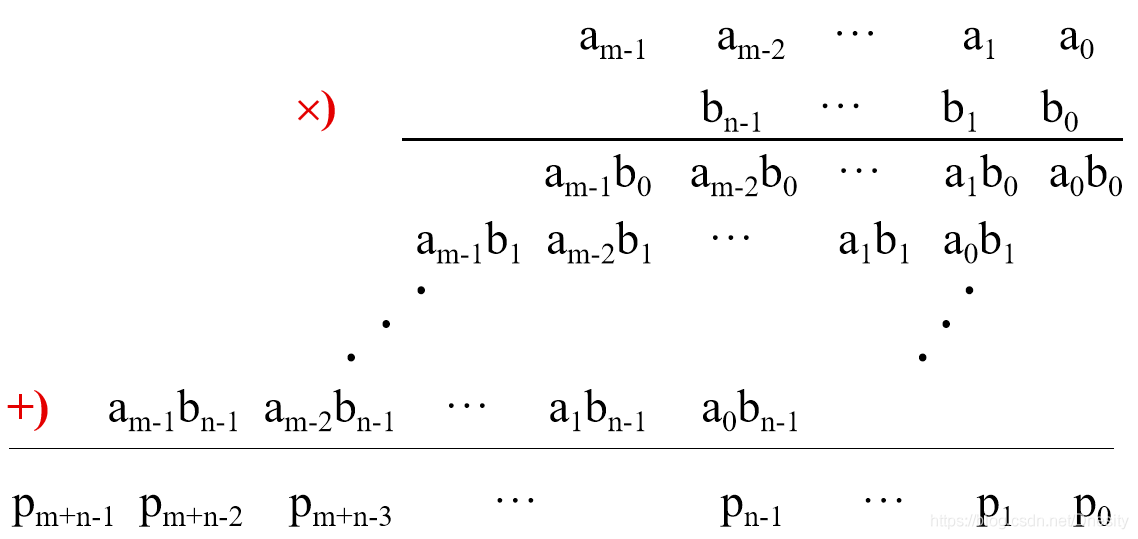
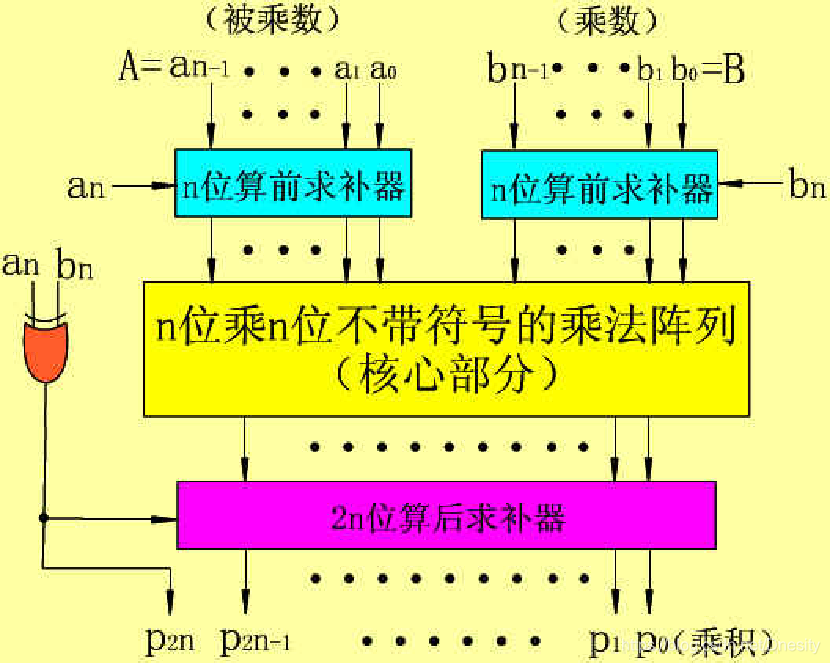
(1) 机器通常只有n位长, 两个n位数相乘, 乘积可能为2n位。
(2) 只有两个操作数相加的加法器难以胜任将n位积 一次相加起来的运算。
2.适合定点机的形式
机器与人们习惯的算法不同之处:
(1) 机器通常只有n位长, 两个n位数相乘, 乘积可能为2n位。
(2) 只有两个操作数相加的加法器难以胜任将n位积 一次相加起来的运算。
2.适合定点机的形式
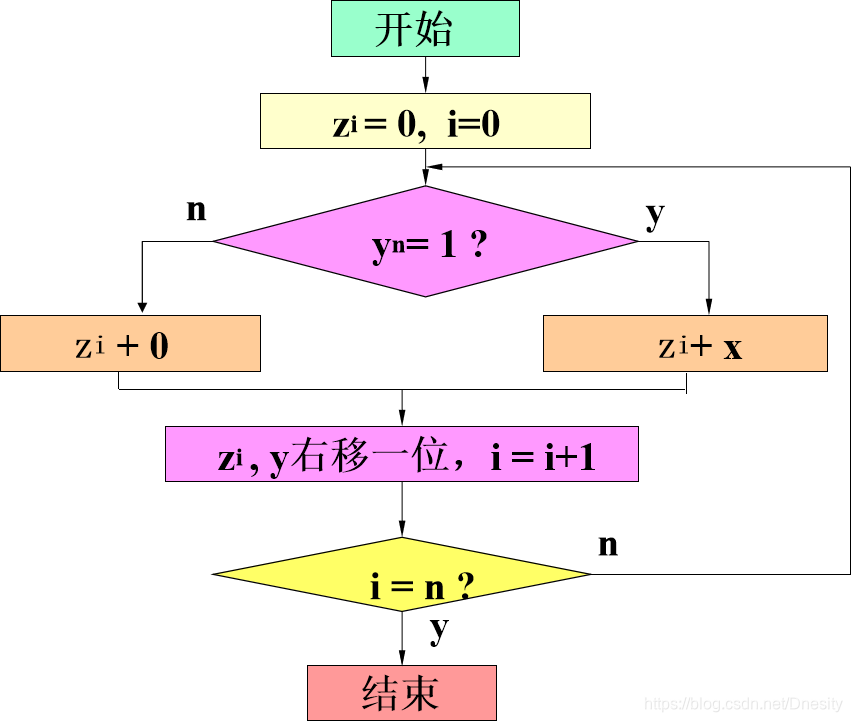
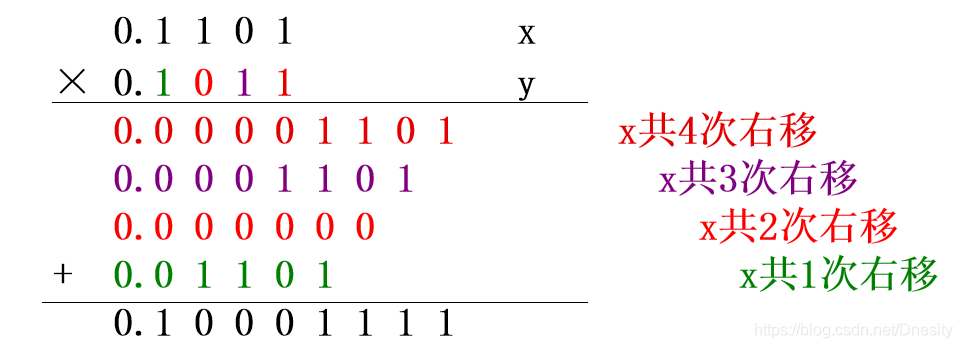 为了适合两个操作数相加的加法器,将 x·y 改写成下面形式:
为了适合两个操作数相加的加法器,将 x·y 改写成下面形式:
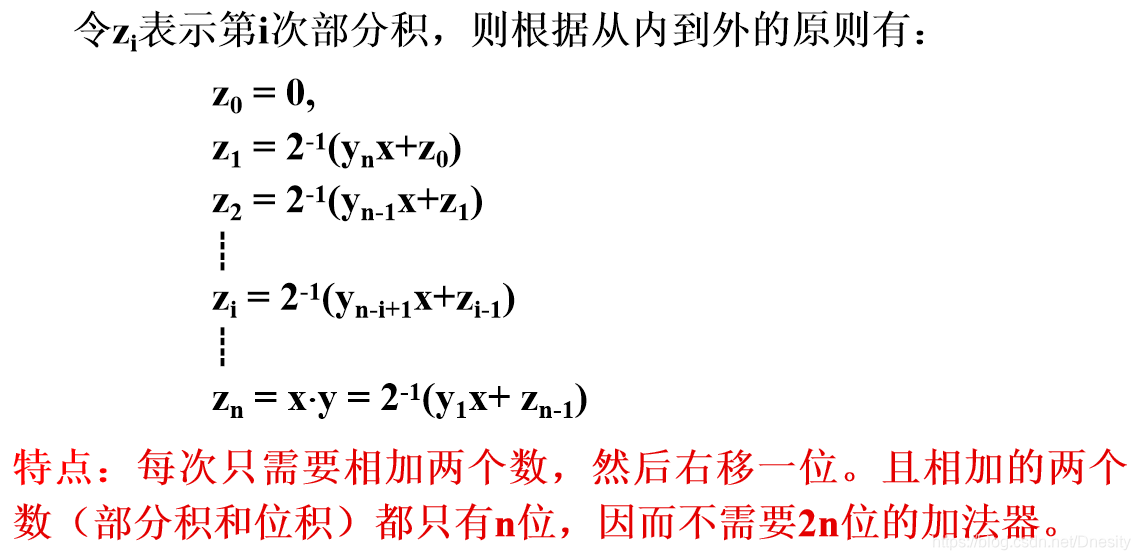
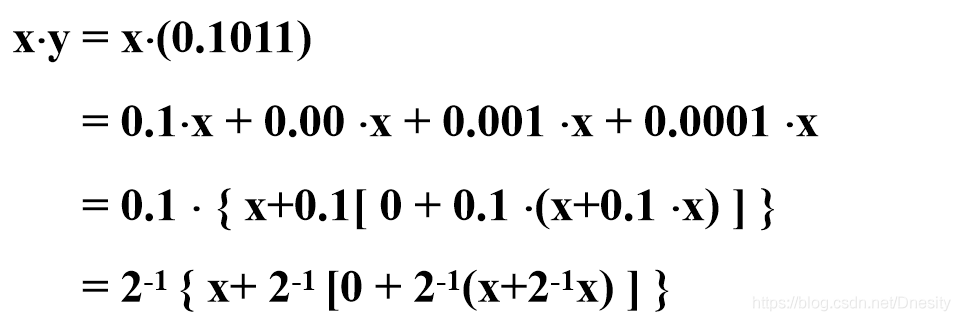 根据此式,按式中括号可表达的层次,从内向外逐次进行移位累加。
一般而言,设被乘数x,乘数y都是小于1的n位定点正数:
x=0.x1x2......xn <1
y=0.y1y2......yn <1
根据此式,按式中括号可表达的层次,从内向外逐次进行移位累加。
一般而言,设被乘数x,乘数y都是小于1的n位定点正数:
x=0.x1x2......xn <1
y=0.y1y2......yn <1
 形成递推公式
形成递推公式
 3.原码一位乘法流程图
3.原码一位乘法流程图

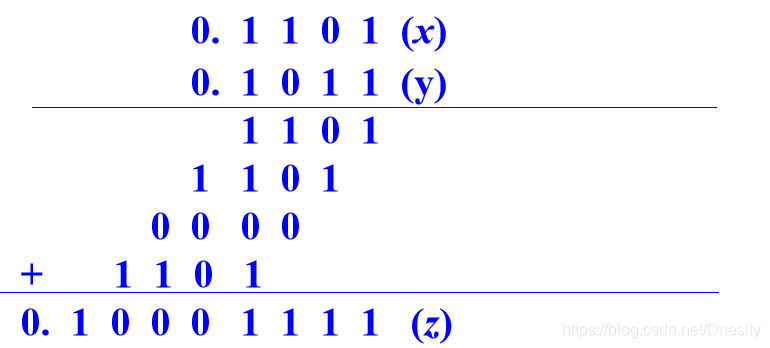
 (1) 习惯方法运算过程:
(1) 习惯方法运算过程:
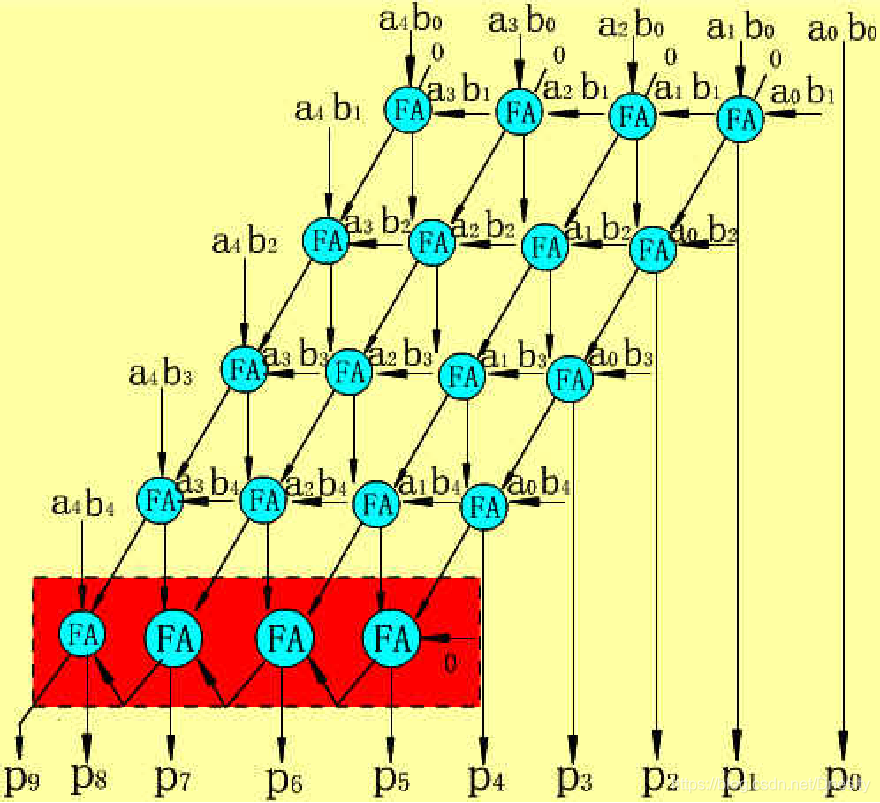
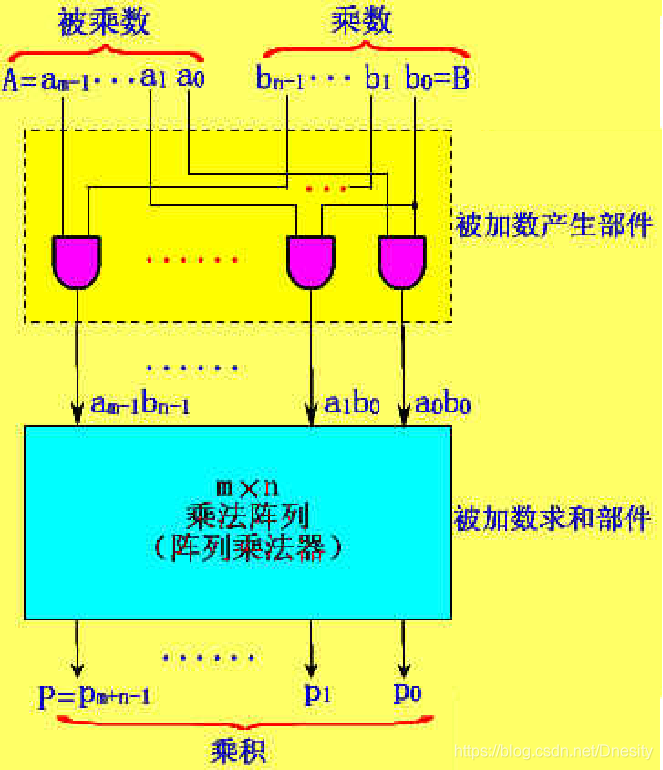
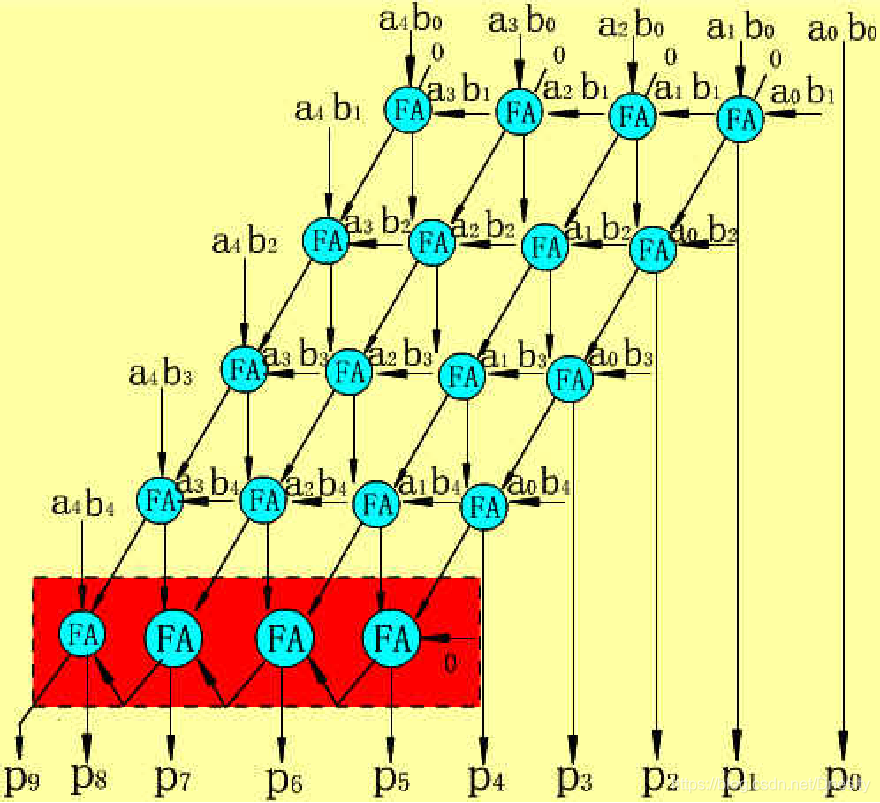
 (2) 不带符号阵列乘法器逻辑框图
(2) 不带符号阵列乘法器逻辑框图
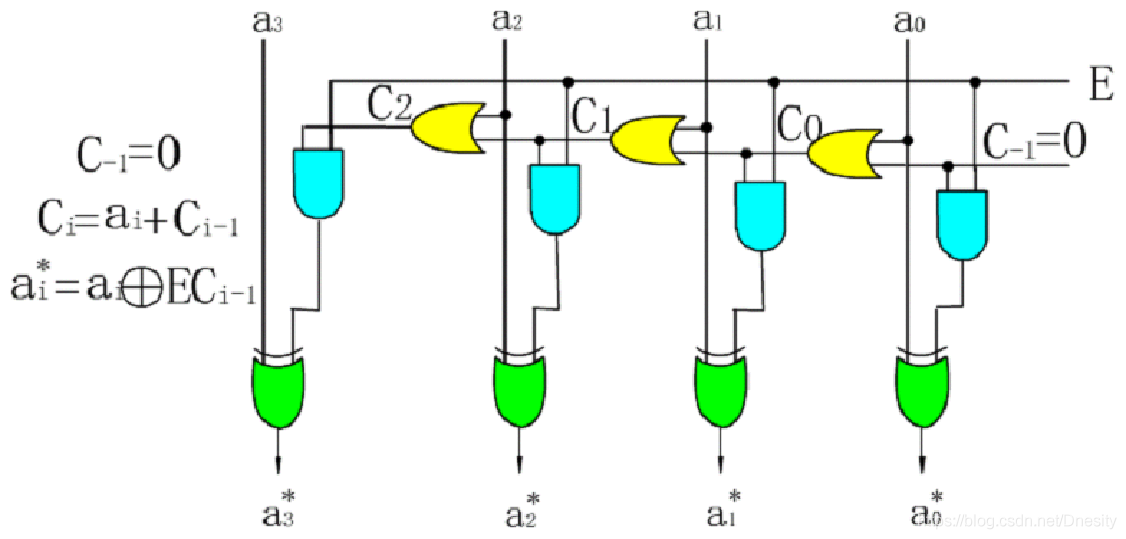
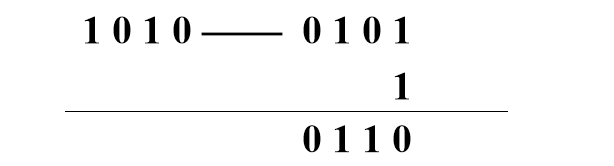 例2: 对1011求补。
例2: 对1011求补。
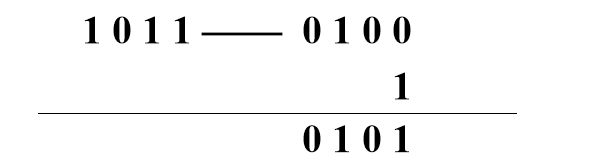 方法:从数的最右端a0开始,由右向左, 直到找出第一个“1”,例如ai=1, 0≤i≤n。这样, ai以左的每一个输入位都求反, 即1变0, 0变1。
方法:从数的最右端a0开始,由右向左, 直到找出第一个“1”,例如ai=1, 0≤i≤n。这样, ai以左的每一个输入位都求反, 即1变0, 0变1。
 2.机器运算与手算的不同
原码一位除法
2.机器运算与手算的不同
原码一位除法
 结果与手算相同,但余数不是真正的余数,多乘了2n,故正确的余数应为2-n×rn,即:0.00000001
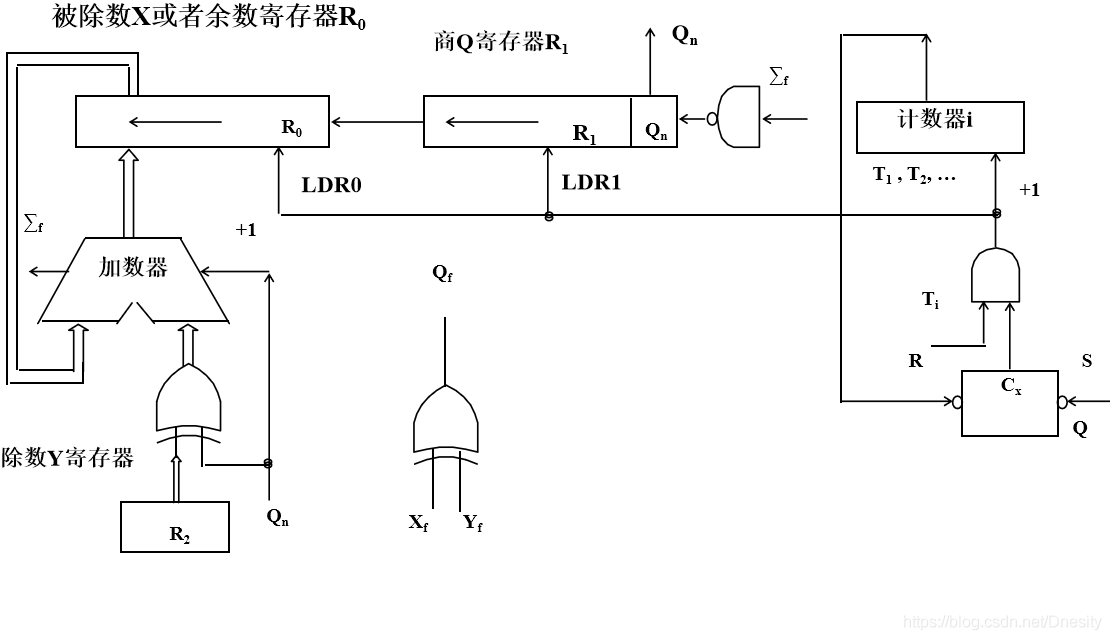
(1) 在计算机中,小数点是固定的,不能简单地采用手算的办法。为便于机器操作, 除数Y固定不变, 被除数和余数进行左移 (相当于乘2)。
(2) 机器不会心算,必须先作减法,若余数为正, 才知道够减;若余数为负, 才知道不够减。不够减时必须恢复原来的余数, 以便再继续往下运算。这种方法称为恢复余数法。
(3) 要恢复原来的余数, 只要当前的余数加上除数即可。但由于要恢复余数, 使除法进行过程的步数不固定, 因此控制比较复杂。
实际中常用不恢复余数法,又称加减交替法。其特点是运算过程中如出现不够减,则不必恢复余数,根据余数符号, 可以继续往下运算,因此步数固定,控制简单。
3.恢复余数法
被除数减除数,够减时,商1;不够减时商0。
由于商0时若不够减,即不能作减法,但现在在判断是否商0时,已经减了除数,为了下次能正确运算,必须把已减掉的除数加回去恢复余数。这就是“恢复余数法”。
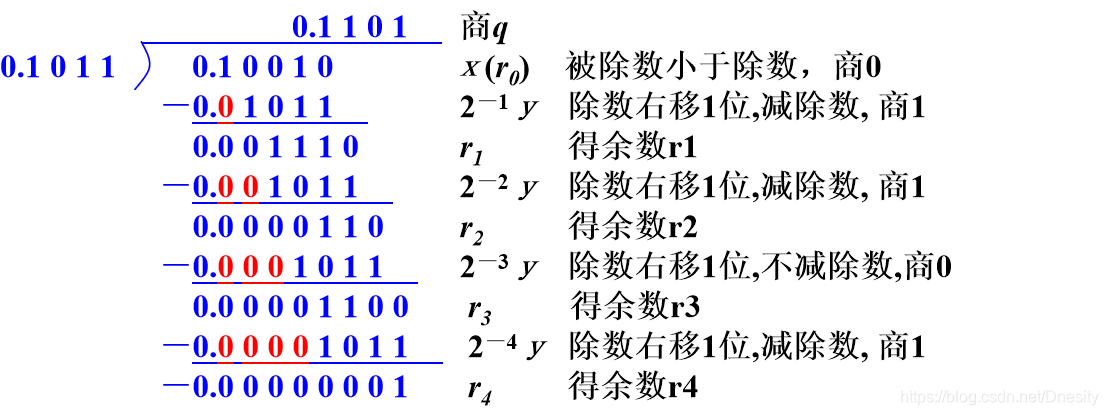
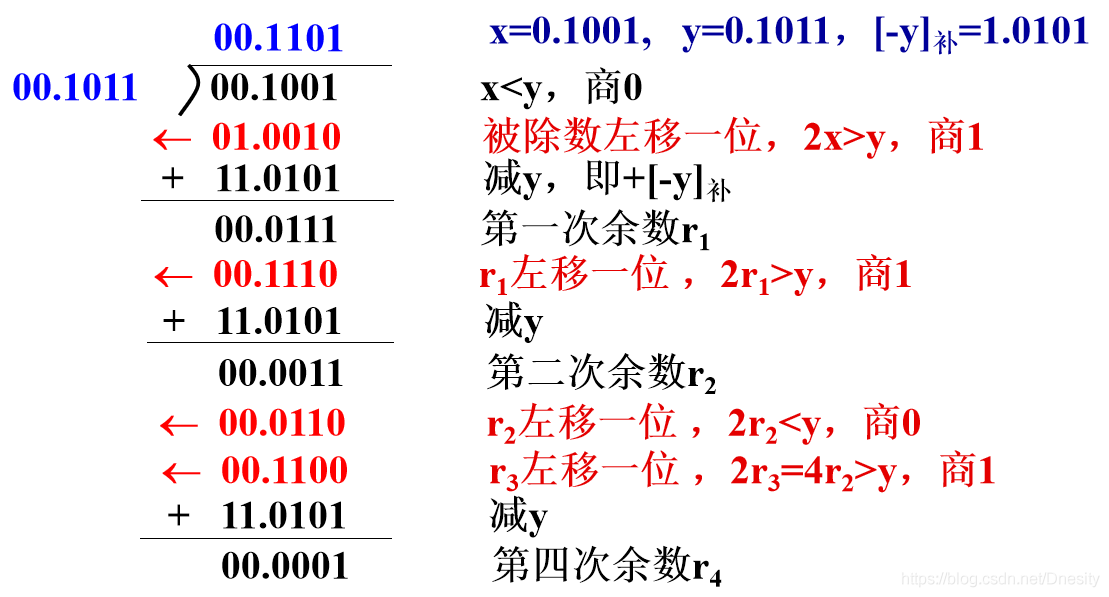
【例1】x=0.1001, y=0.1011, 用恢复余数法求 x/y。
解:[x]原 =[x]补= x=0.1001, [y]补=0.1011, [-y]补=1.0101
结果与手算相同,但余数不是真正的余数,多乘了2n,故正确的余数应为2-n×rn,即:0.00000001
(1) 在计算机中,小数点是固定的,不能简单地采用手算的办法。为便于机器操作, 除数Y固定不变, 被除数和余数进行左移 (相当于乘2)。
(2) 机器不会心算,必须先作减法,若余数为正, 才知道够减;若余数为负, 才知道不够减。不够减时必须恢复原来的余数, 以便再继续往下运算。这种方法称为恢复余数法。
(3) 要恢复原来的余数, 只要当前的余数加上除数即可。但由于要恢复余数, 使除法进行过程的步数不固定, 因此控制比较复杂。
实际中常用不恢复余数法,又称加减交替法。其特点是运算过程中如出现不够减,则不必恢复余数,根据余数符号, 可以继续往下运算,因此步数固定,控制简单。
3.恢复余数法
被除数减除数,够减时,商1;不够减时商0。
由于商0时若不够减,即不能作减法,但现在在判断是否商0时,已经减了除数,为了下次能正确运算,必须把已减掉的除数加回去恢复余数。这就是“恢复余数法”。
【例1】x=0.1001, y=0.1011, 用恢复余数法求 x/y。
解:[x]原 =[x]补= x=0.1001, [y]补=0.1011, [-y]补=1.0101
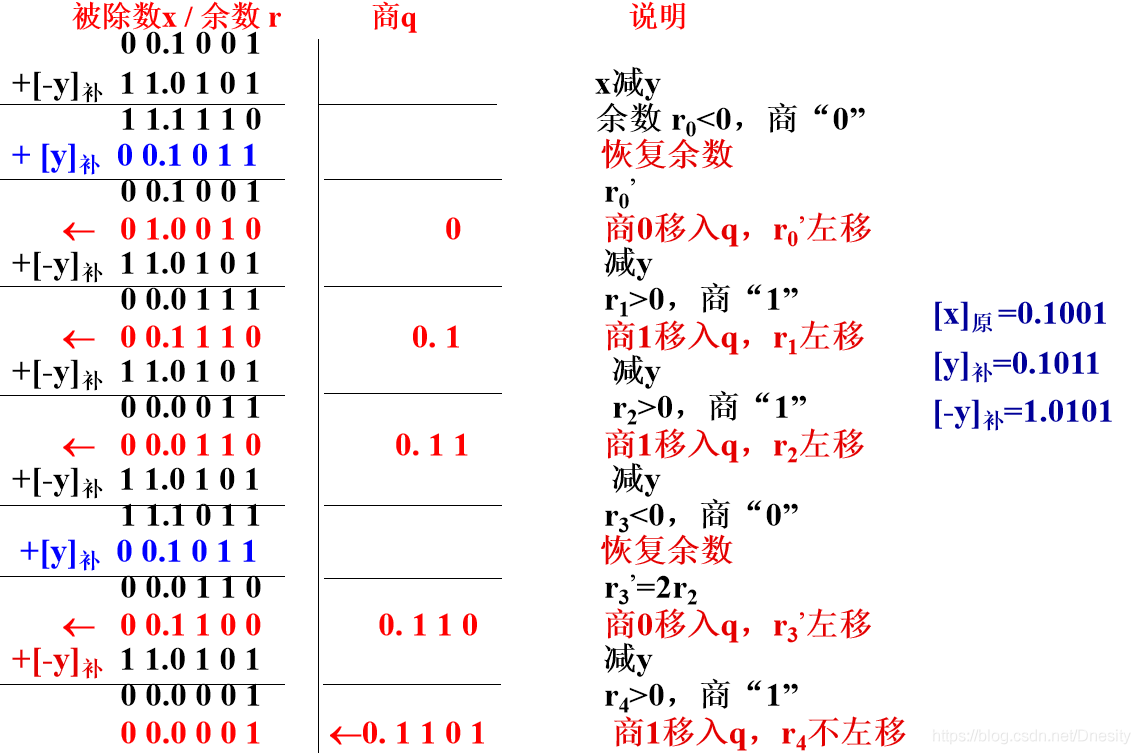 余数每次左移相当于乘以2,在求得n位商后,相当于多乘了2^n,所以最后余数应乘以2^(-n)才是正确的值。
故:[q]原=0. 1 1 0 1 余数 [r4]原=0.00000001
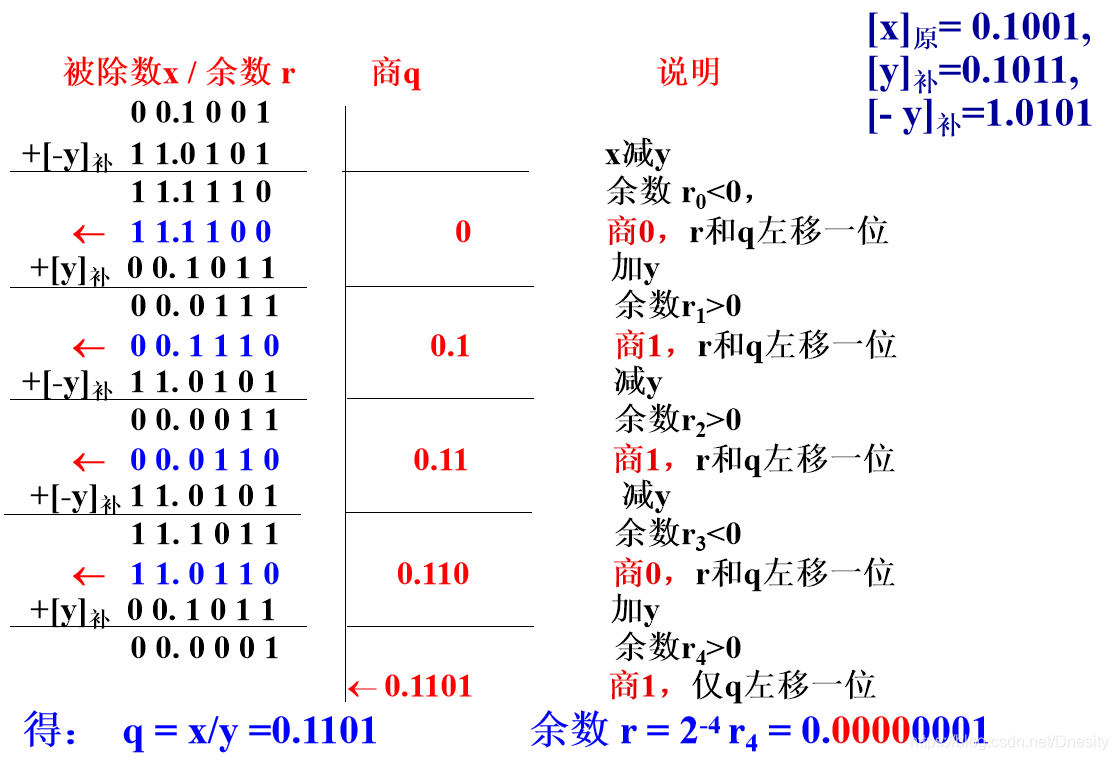
4.加减交替法(不恢复余数法)
上述恢复余数法由于要恢复余数,使得除法的步数不固定,控制比较复杂。实际上常用的是加减交替法。
特点:当运算过程中出现不够减的情况,不必恢复余数,而是 根据余数的符号,继续往下运算,因此步数固定,控制简单。
运算规则:
当余数为正时,商1,余数左移一位,减除数;
当余数为负时,商0,余数左移一位,加除数。
【例2】x=0.1001, y=0.1011, 用加减交替法求 x/y. 解:[x]原=[x]补= x =0.1001, [y]补=0.1011, [- y]补=1.0101
余数每次左移相当于乘以2,在求得n位商后,相当于多乘了2^n,所以最后余数应乘以2^(-n)才是正确的值。
故:[q]原=0. 1 1 0 1 余数 [r4]原=0.00000001
4.加减交替法(不恢复余数法)
上述恢复余数法由于要恢复余数,使得除法的步数不固定,控制比较复杂。实际上常用的是加减交替法。
特点:当运算过程中出现不够减的情况,不必恢复余数,而是 根据余数的符号,继续往下运算,因此步数固定,控制简单。
运算规则:
当余数为正时,商1,余数左移一位,减除数;
当余数为负时,商0,余数左移一位,加除数。
【例2】x=0.1001, y=0.1011, 用加减交替法求 x/y. 解:[x]原=[x]补= x =0.1001, [y]补=0.1011, [- y]补=1.0101
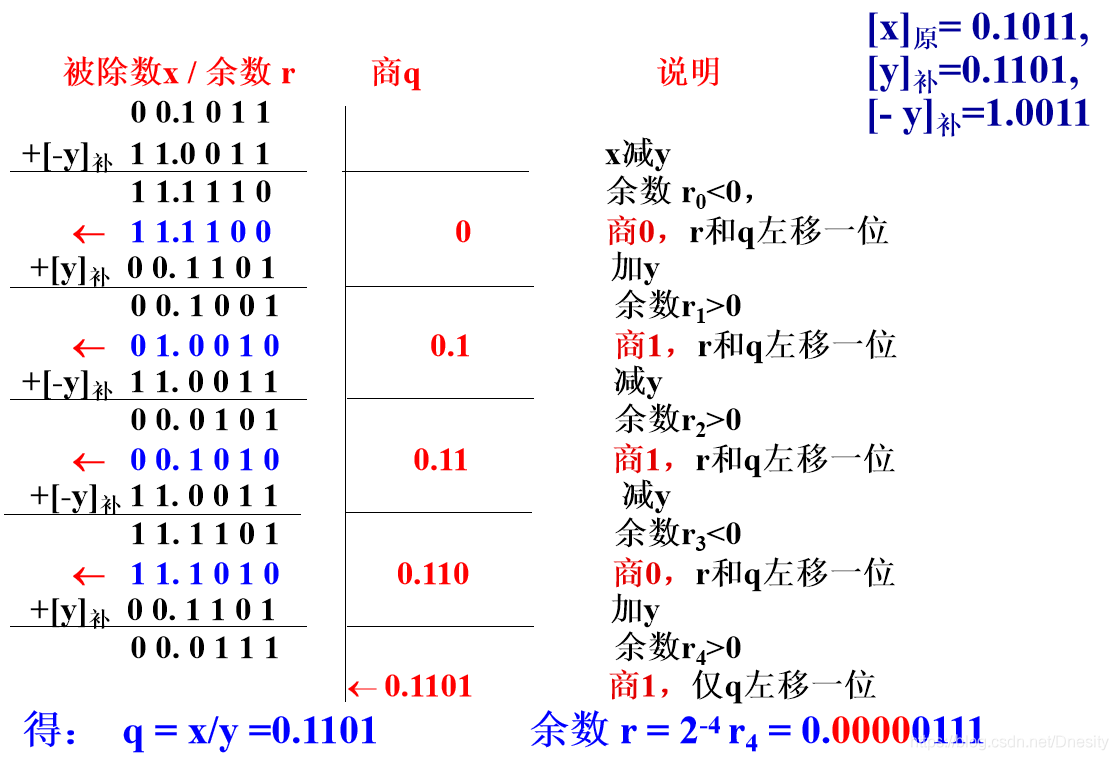
 【例3】x=0.1011, y=0.1101, 用加减交替法求 x/y. 解:[x]原=[x]补= x =0.1011, [y]补=0.1101, [- y]补=1.0011
【例3】x=0.1011, y=0.1101, 用加减交替法求 x/y. 解:[x]原=[x]补= x =0.1011, [y]补=0.1101, [- y]补=1.0011
 原码加减交替除法流程图
原码加减交替除法流程图
 阵列除法器
阵列式除法器是一种并行运算部件, 采用大规模集成电路制造。与早期的串行除法器相比, 阵列除法器不仅所需的控制线路少, 而且能提供令人满意的高速运算速度。
阵列除法器有多种多样形式:
不恢复余数阵列除法器;
补码阵列除法器等等。
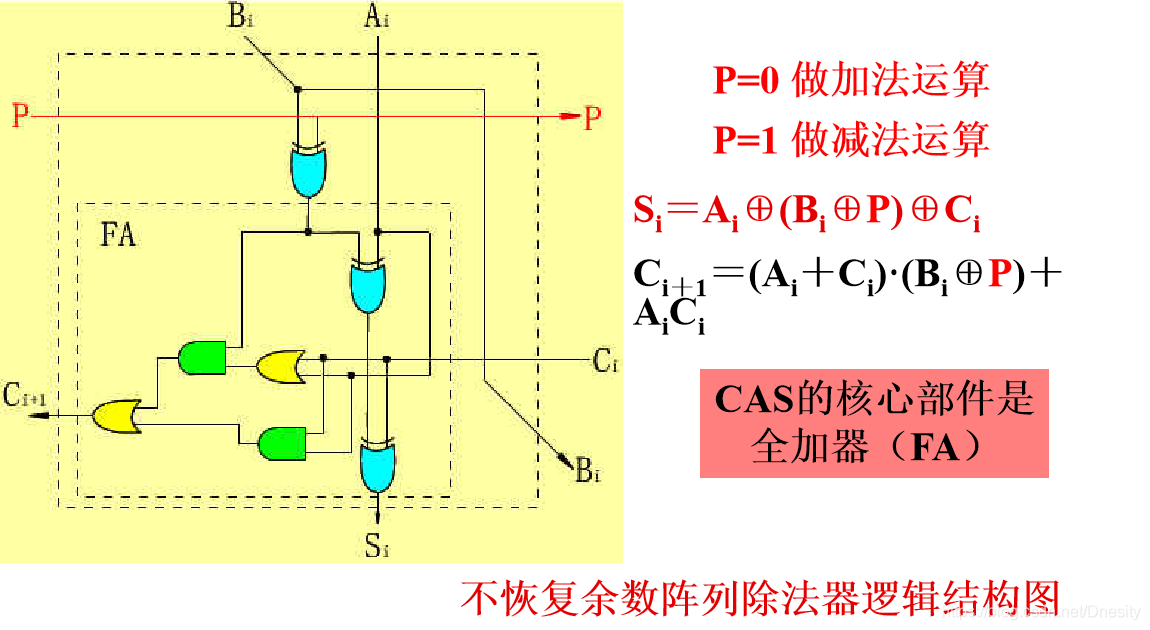
1.可控加法/减法(CAS)单元
用于并行除法流水逻辑阵列中。
阵列除法器
阵列式除法器是一种并行运算部件, 采用大规模集成电路制造。与早期的串行除法器相比, 阵列除法器不仅所需的控制线路少, 而且能提供令人满意的高速运算速度。
阵列除法器有多种多样形式:
不恢复余数阵列除法器;
补码阵列除法器等等。
1.可控加法/减法(CAS)单元
用于并行除法流水逻辑阵列中。


 在减法情况下:输入Ci称为借位输入,而Ci+1称为借位输出。
为说明CAS单元的实际内部电路实现,将方程式
Si=Ai⊕(Bi⊕P)⊕Ci
Ci+1=(Ai+Ci)·(Bi⊕P)+AiCi
加以变换,可得如下形式:
在减法情况下:输入Ci称为借位输入,而Ci+1称为借位输出。
为说明CAS单元的实际内部电路实现,将方程式
Si=Ai⊕(Bi⊕P)⊕Ci
Ci+1=(Ai+Ci)·(Bi⊕P)+AiCi
加以变换,可得如下形式:
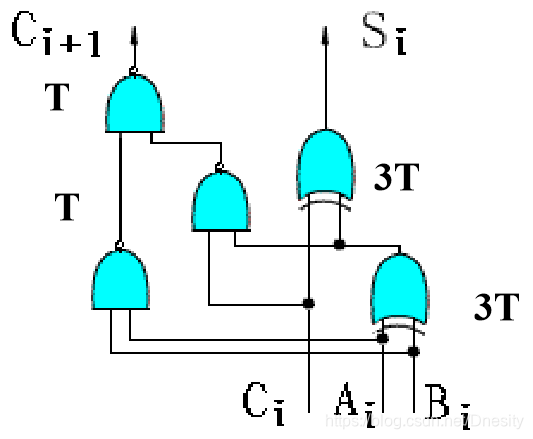
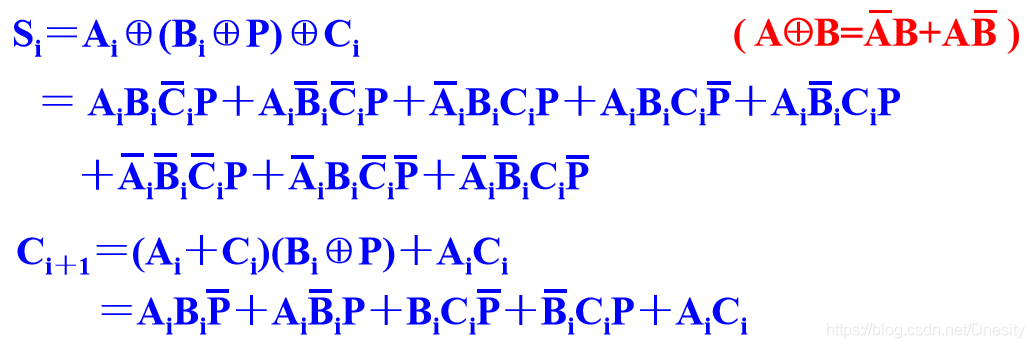 在这两个表达式中,每一个都能用一个三级组合逻辑电路(包括反向器)来实现。因此每一个基本的CAS单元的延迟时间为3T单元。
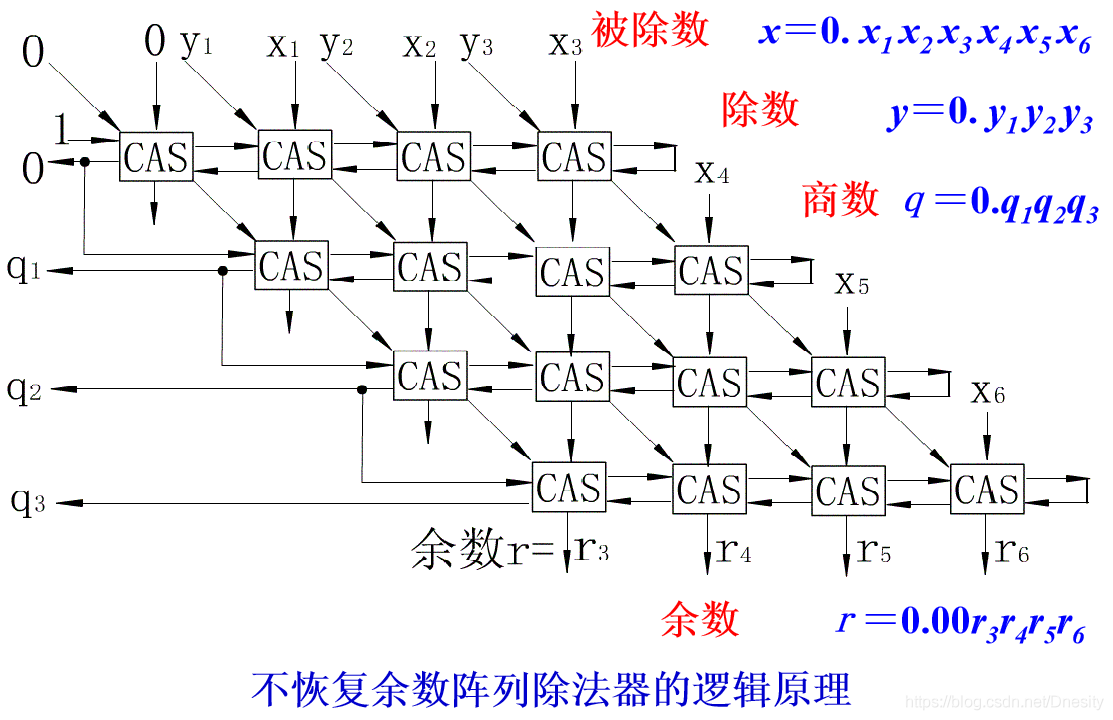
2.不恢复余数的阵列除法器(不恢复余数阵列除法,也叫加减交替法。)
在不恢复余数的除法阵列中: • 当余数为正时(ri ≥ 0) ,商“1”,下次做减法运算,减法是用2的补码运算来实现的,此时
[x-y]补= [x ]补+ [-y]补;
• 当余数为负时(ri< 0) ,商“0”,下次做加法运算;
• 每次运算完成后要将余数左移一位,再与除数做加或减运算; • 商的符号由两数的符号按位相加求得。
例: x=0.101001, y=0.111, 求x÷y。 [-y]补=1.001
在这两个表达式中,每一个都能用一个三级组合逻辑电路(包括反向器)来实现。因此每一个基本的CAS单元的延迟时间为3T单元。
2.不恢复余数的阵列除法器(不恢复余数阵列除法,也叫加减交替法。)
在不恢复余数的除法阵列中: • 当余数为正时(ri ≥ 0) ,商“1”,下次做减法运算,减法是用2的补码运算来实现的,此时
[x-y]补= [x ]补+ [-y]补;
• 当余数为负时(ri< 0) ,商“0”,下次做加法运算;
• 每次运算完成后要将余数左移一位,再与除数做加或减运算; • 商的符号由两数的符号按位相加求得。
例: x=0.101001, y=0.111, 求x÷y。 [-y]补=1.001
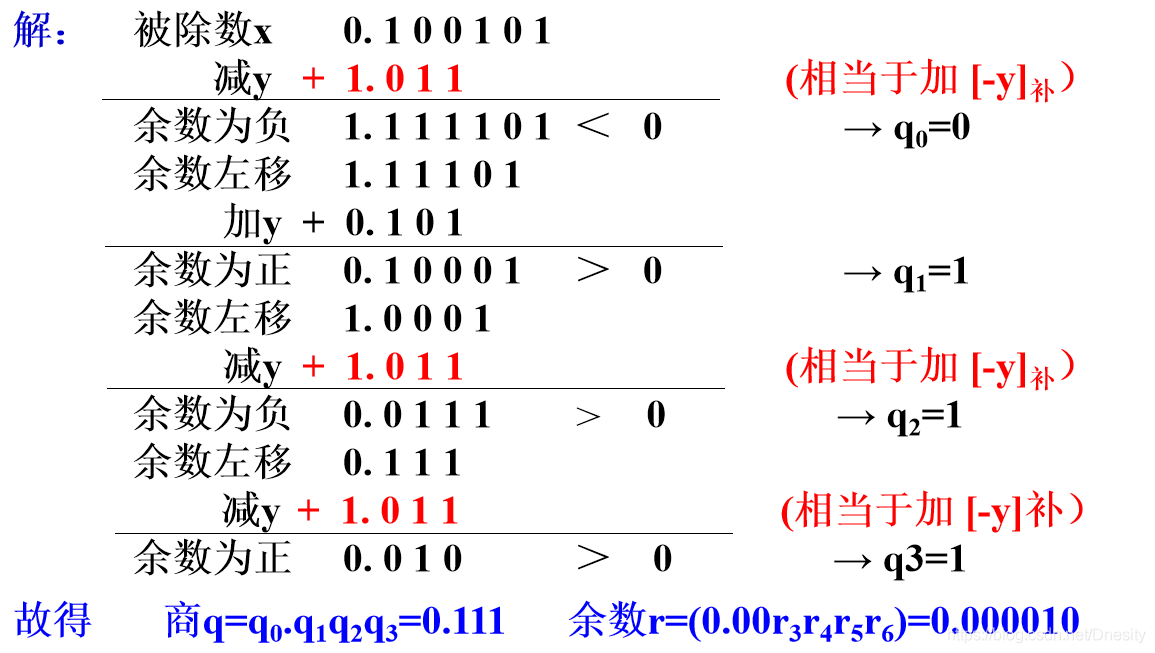 例: x=0.100101, y=0.101, 求x÷y。 [-y]补=1.011
例: x=0.100101, y=0.101, 求x÷y。 [-y]补=1.011

 Cactus仙人掌
发布了29 篇原创文章 · 获赞 1 · 访问量 3833
私信
关注
Cactus仙人掌
发布了29 篇原创文章 · 获赞 1 · 访问量 3833
私信
关注
不考虑进位
各种逻辑门的图形符号
1.一位全加器

机器与人们习惯的算法不同之处:
(1) 机器通常只有n位长, 两个n位数相乘, 乘积可能为2n位。
(2) 只有两个操作数相加的加法器难以胜任将n位积 一次相加起来的运算。
2.适合定点机的形式
为了适合两个操作数相加的加法器,将 x·y 改写成下面形式:
根据此式,按式中括号可表达的层次,从内向外逐次进行移位累加。
一般而言,设被乘数x,乘数y都是小于1的n位定点正数:
x=0.x1x2......xn <1
y=0.y1y2......yn <1
形成递推公式
3.原码一位乘法流程图
(1) 习惯方法运算过程:
(2) 不带符号阵列乘法器逻辑框图
例2: 对1011求补。
方法:从数的最右端a0开始,由右向左, 直到找出第一个“1”,例如ai=1, 0≤i≤n。这样, ai以左的每一个输入位都求反, 即1变0, 0变1。
2.机器运算与手算的不同
原码一位除法
结果与手算相同,但余数不是真正的余数,多乘了2n,故正确的余数应为2-n×rn,即:0.00000001
(1) 在计算机中,小数点是固定的,不能简单地采用手算的办法。为便于机器操作, 除数Y固定不变, 被除数和余数进行左移 (相当于乘2)。
(2) 机器不会心算,必须先作减法,若余数为正, 才知道够减;若余数为负, 才知道不够减。不够减时必须恢复原来的余数, 以便再继续往下运算。这种方法称为恢复余数法。
(3) 要恢复原来的余数, 只要当前的余数加上除数即可。但由于要恢复余数, 使除法进行过程的步数不固定, 因此控制比较复杂。
实际中常用不恢复余数法,又称加减交替法。其特点是运算过程中如出现不够减,则不必恢复余数,根据余数符号, 可以继续往下运算,因此步数固定,控制简单。
3.恢复余数法
被除数减除数,够减时,商1;不够减时商0。
由于商0时若不够减,即不能作减法,但现在在判断是否商0时,已经减了除数,为了下次能正确运算,必须把已减掉的除数加回去恢复余数。这就是“恢复余数法”。
【例1】x=0.1001, y=0.1011, 用恢复余数法求 x/y。
解:[x]原 =[x]补= x=0.1001, [y]补=0.1011, [-y]补=1.0101
余数每次左移相当于乘以2,在求得n位商后,相当于多乘了2^n,所以最后余数应乘以2^(-n)才是正确的值。
故:[q]原=0. 1 1 0 1 余数 [r4]原=0.00000001
4.加减交替法(不恢复余数法)
上述恢复余数法由于要恢复余数,使得除法的步数不固定,控制比较复杂。实际上常用的是加减交替法。
特点:当运算过程中出现不够减的情况,不必恢复余数,而是 根据余数的符号,继续往下运算,因此步数固定,控制简单。
运算规则:
当余数为正时,商1,余数左移一位,减除数;
当余数为负时,商0,余数左移一位,加除数。
【例2】x=0.1001, y=0.1011, 用加减交替法求 x/y. 解:[x]原=[x]补= x =0.1001, [y]补=0.1011, [- y]补=1.0101
【例3】x=0.1011, y=0.1101, 用加减交替法求 x/y. 解:[x]原=[x]补= x =0.1011, [y]补=0.1101, [- y]补=1.0011
原码加减交替除法流程图
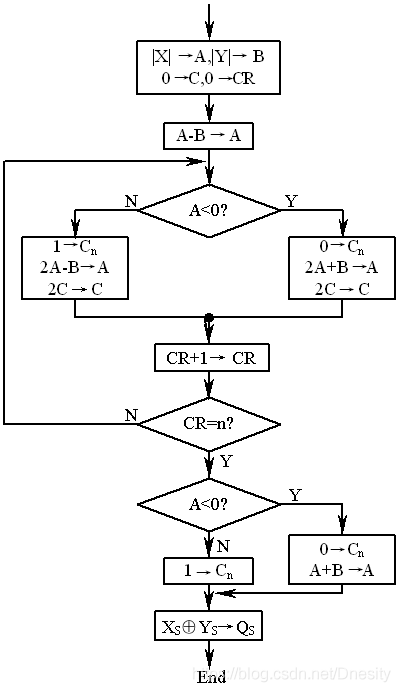
原码加减交替法原理逻辑框图
阵列除法器
阵列式除法器是一种并行运算部件, 采用大规模集成电路制造。与早期的串行除法器相比, 阵列除法器不仅所需的控制线路少, 而且能提供令人满意的高速运算速度。
阵列除法器有多种多样形式:
不恢复余数阵列除法器;
补码阵列除法器等等。
1.可控加法/减法(CAS)单元
用于并行除法流水逻辑阵列中。
在减法情况下:输入Ci称为借位输入,而Ci+1称为借位输出。
为说明CAS单元的实际内部电路实现,将方程式
Si=Ai⊕(Bi⊕P)⊕Ci
Ci+1=(Ai+Ci)·(Bi⊕P)+AiCi
加以变换,可得如下形式:
在这两个表达式中,每一个都能用一个三级组合逻辑电路(包括反向器)来实现。因此每一个基本的CAS单元的延迟时间为3T单元。
2.不恢复余数的阵列除法器(不恢复余数阵列除法,也叫加减交替法。)
在不恢复余数的除法阵列中: • 当余数为正时(ri ≥ 0) ,商“1”,下次做减法运算,减法是用2的补码运算来实现的,此时
[x-y]补= [x ]补+ [-y]补;
• 当余数为负时(ri< 0) ,商“0”,下次做加法运算;
• 每次运算完成后要将余数左移一位,再与除数做加或减运算; • 商的符号由两数的符号按位相加求得。
例: x=0.101001, y=0.111, 求x÷y。 [-y]补=1.001
例: x=0.100101, y=0.101, 求x÷y。 [-y]补=1.011
- 点赞
- 收藏
- 分享
- 文章举报
Cactus仙人掌
发布了29 篇原创文章 · 获赞 1 · 访问量 3833
私信
关注

相关文章推荐
- 运算方法和运算器
- 运算方法和运算器
- 【计算机组成原理】第2章 运算方法和运算器
- 计算机组成复习——运算方法与运算器
- 运算方法与运算器
- Chapter2 运算方法与运算器
- 计算机组成原理:运算方法和运算器
- 第二章 运算方法和运算器
- 第二章 运算方法和运算器笔记简记
- matlab控制运算精度函数digits(A)和vpa(B)的使用方法
- JS浮点数相乘运算解决误差的方法 转载
- java实现跨数据库关联运算的简便方法
- 按位与、或、异或等运算方法
- 计算机的运算方法
- JSP第四篇【EL表达式介绍、获取各类数据、11个内置对象、执行运算、回显数据、自定义函数、fn方法库】
- 第6章 计算机的运算方法
- inux shell 实现 四则运算(整数及浮点) 简单方法
- linux shell 时间运算以及时间差计算方法
- (高精度运算4.7.26)POJ 1220 NUMBER BASE CONVERSION(高精度数的任意进制的转换——方法:ba1----->10进制----->ba2)
- java中&AND |OR !NOT^XOR && ||逻辑运算符的运算方法