基于STM32的平衡车机器人设计-硬件电路设计
2018-05-08 17:01
645 查看
今天分享一个STM32F103为主控的自平衡车机器人的硬件电路设计。(亲测完全可用,且没有任何问题)
电路原理图:
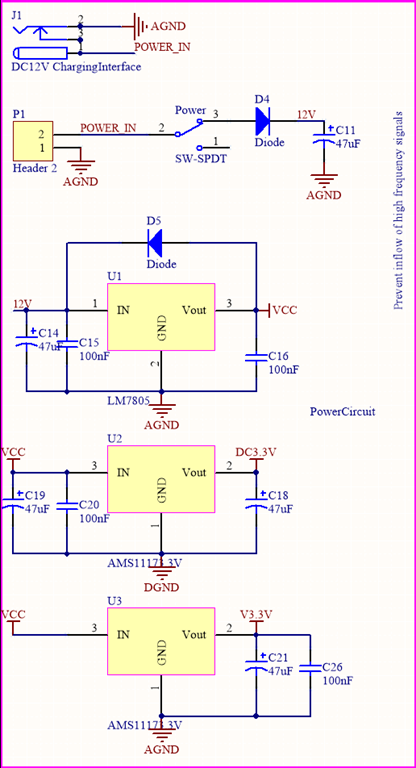
电源部分采用12V锂电池作为输入,分三路稳压,其中7805作为5V传感器的供电以及后级AMS1117的电源输入端,一路AMS117 3.3单独给CPU供电,另外一路给3.3V传感器供电。本方案自带板载充电以及电压检测功能

时钟电路采用8M外部时钟,以及32.768K的RTC时钟,可方便拓展
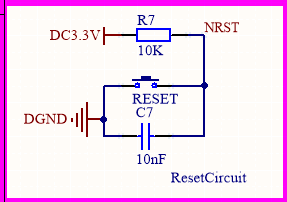
复位电路,采用上电自复位以及手动复位
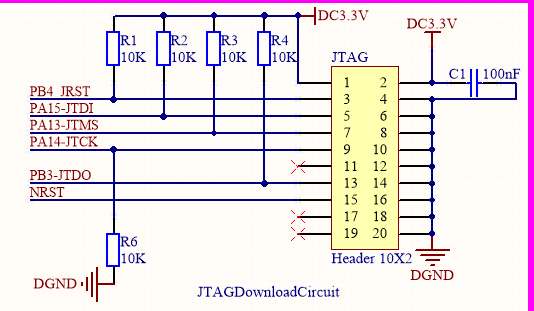
下载电路采用JTAG下载电路

按键+OLED可以实现在线调试参数以及实时显示所需要的数据。OLED采用SPI的接口协议。为了减少花屏,对CS引脚做了隔离处理,到目前为止,并没有出现OLED花屏的现象。即使在车身发生碰撞的情况下也不会。
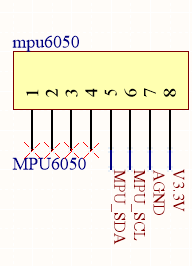
姿态传感器采用集成的MPU6050,利用模拟IIC协议通讯。
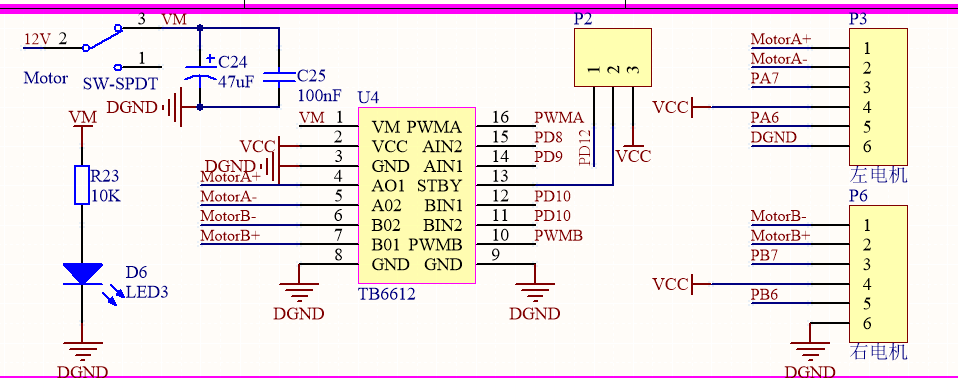
电机驱动以及电机接口电路。电机驱动采用的是TB6612,不过这款驱动使用的时候一定要小心,也别娇贵,容易烧掉,下次我再做的时候会增加保护电路。也建议用户添加保护电路。
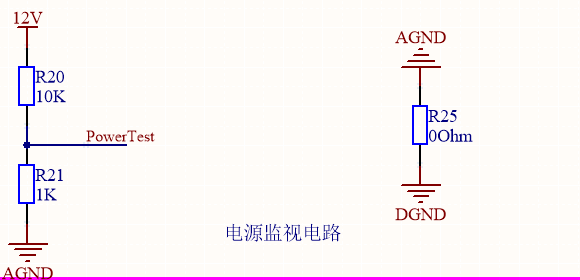
电源监控电路以及单点接地电路。由于本系统存在AD采集以及大量的数字传感器,为了提高系统的稳定性,对于不同的地进行了处理
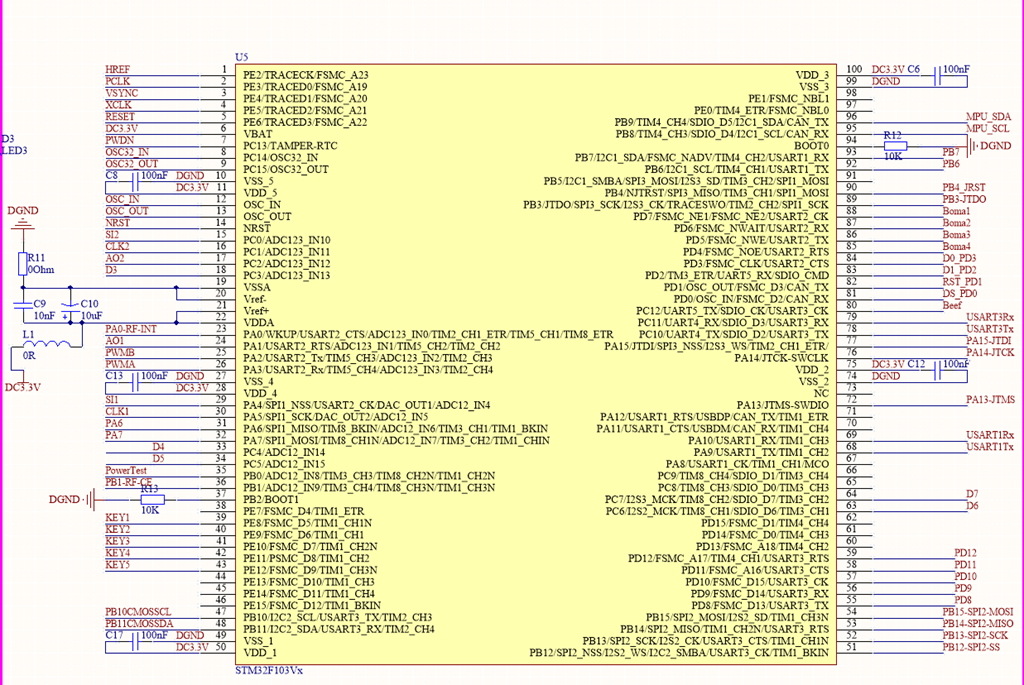
stm32核心部分电路

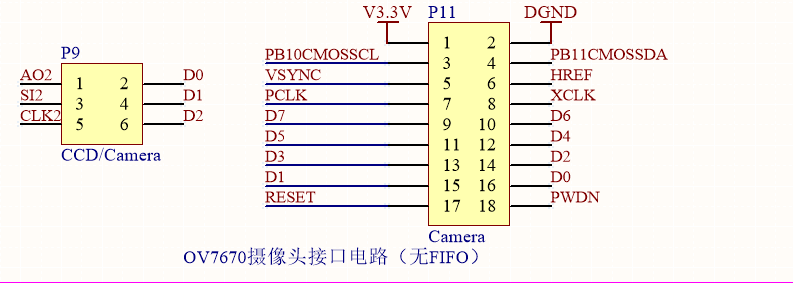
视觉传感器预留了双CCD以及摄像头的接口,可以方便用户选择。

一共预留了两路USART,其中一路可以用来连接串口转WIFI模块,并且预留NRF1401 2.4G模块

4路拨码开关电路,方便进行套餐选择
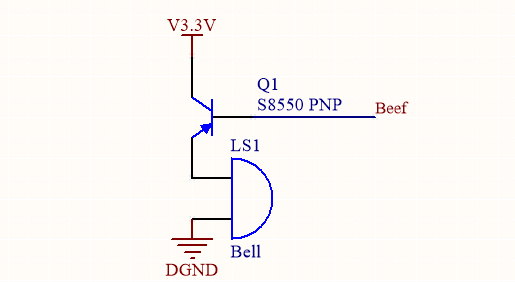
蜂鸣器电路
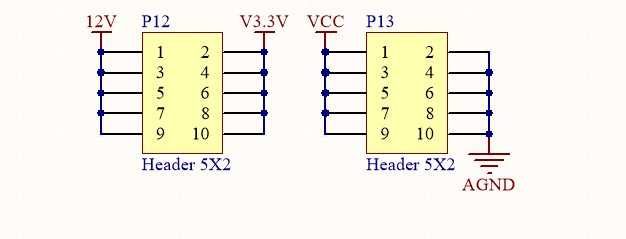
外接电源
PCB如下:

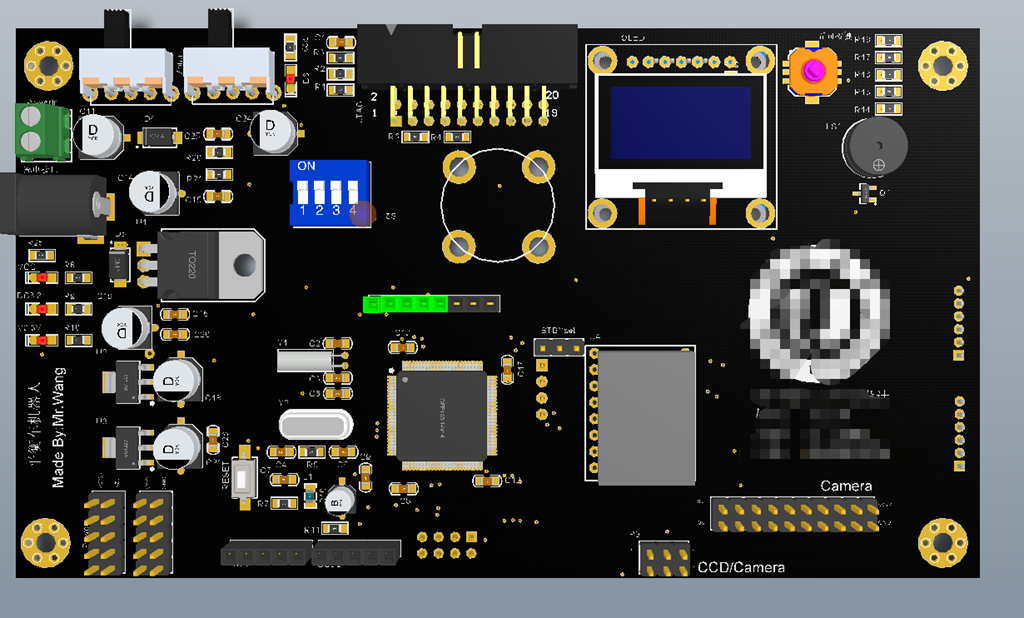
3D视图
有需要源文件的可以联系我,在评论区留言,留下联系方式即可

相关文章推荐
- 基于COMX和STM32的机器人伺服控制器电路设计
- 基于STM32 8通道ADC采样实现源代码(转) 以后设计参考使用
- 基于STM32的多路电压测量设计方案
- 基于视觉的高速寻线机器人设计与实现
- 基于BBB的4轮移动轮式机器人系统设计与实现(六)--网络通信类的开发
- 基于STM32的学习型通用红外遥控设备的设计实现(四)
- 基于ARM9和Linux的 机器人控制系统设计
- 基于stm32的无线多点温度采集系统设计
- 引用 基于DSP的仿人机器人运动控制器设计
- 基于STM32的函数信号发生器设计(上:硬件设计)
- 基于STM32的TFT_LCD&TOUCH设计选型
- 基于Stm32的MP3播放器设计与实现
- 基于STM32和RC632的读写器设计(硬件版)
- 自制平衡小车:从入门到放弃——基于stm32的平衡小车系列(一)
- 机器人进阶学习(一)---基于stm32的底层搭建,与上位机通讯及base_control编写
- 基于BBB的4轮移动轮式机器人系统设计与实现(一)-----开篇引言
- 求助,帮忙设计基于stm32的地图导航
- 基于BBB的4轮移动轮式机器人系统设计与实现(八)-- SIM908 GPS 数据获取
- 基于ZigBee和STM32的智能家居控制系统的设计与实现(二)
- 基于STM32的半导体制冷片(TEC)温度控制系统设计