LQR 的直观推导及简单应用
2018-03-27 13:02
246 查看
本文主要介绍LQR的直观推导,说明LQR目标函数J选择的直观含义以及简单介绍矩阵Q,R的选取,最后总结LQR控制器的设计步奏,并将其应用在一个简单的倒立摆例子上。 假设有一个线性系统能用状态向量的形式表示成:

( 1 )其中

,初始条件是

. 并且假设这个系统的所有状态变量都是可测量到的。 在介绍LQR前,先简单回顾一下现代控制理论中最基本的控制器--全状态反馈控制。 全状态反馈控制系统图形如下:
我们要设计一个状态反馈控制器

使得闭环系统能够满足我们期望的性能。我们把这种控制代入之前的系统状态方程得到


( 2 )对于(1)式的开环系统,由现代控制理论我们知道开环传递函数的极点就是系统矩阵A的特征值。(传递函数的分母是|sI -A|,|·|表示行列式)现在变成了(2)的闭环形式,状态变换矩阵A变成了(A-BK)。因此通过配置反馈矩阵K,可以使得闭环系统的极点达到我们期望的状态。注意,这种控制器的设计与输出矩阵C,D没有关系。 那么,什么样的极点会使得系统性能很棒呢?并且,当系统变量很多的时候,即使设计好了极点,矩阵K也不好计算。 于是,LQR为我们设计最优控制器提供了一种思路。在设计LQR控制器前,我们得设计一个能量函数,最优的控制轨迹应该使得该能量函数最小。一般选取如下形式的能量函数。
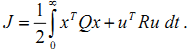
,其中Q是你自己设计的半正定矩阵,R为正定矩阵。可是,为什么能量函数(或称系统的目标函数)得设计成这个样子呢? 首先假设状态向量x(t)是1维的,那么

其实就是一个平方项 Qx^2 >= 0,

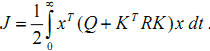
同理. 能量函数J要最小,那么状态向量x(t),u(t)都得小。J最小,那肯定是个有界的函数,我们能推断当t趋于无穷时,状态向量x(t)将趋于0,这也保证了闭环系统的稳定性。那输入u(t)要小是什么意思呢?它意味着我们用最小的控制代价得到最优的控制。譬如控制电机,输入PWM小,将节省能量。 再来看看矩阵Q,R的选取,一般来说,Q值选得大意味着,要使得J小,那x(t)需要更小,也就是意味着闭环系统的矩阵(A-BK)的特征值处于S平面左边更远的地方,这样状态x(t)就以更快的速度衰减到0。另一方面,大的R表示更加关注输入变量u(t),u(t)的减小,意味着状态衰减将变慢。同时,Q为半正定矩阵意味着他的特征值非负,R为正定矩阵意味着它的特征值为正数。如果你选择Q,R都是对角矩阵的话,那么Q的对角元素为正数,允许出现几个0.R的对角元素只能是正数。 注意LQR调节器是将状态调节到0,这与轨迹跟踪不同,轨迹跟踪是使得系统误差为0. 知道了背景后,那如何设计反馈矩阵K使得能量函数J最小呢?很多地方都是从最大值原理,Hamilton函数推导出来。这里用另外一种更容易接受的方式推导。将u = -Kx 代入之前的能量函数得到:
( 3 )
为了找到K,我们先不防假设存在一个常量矩阵P使得:

(4)代入(3)式得:

(5)注意,我们已经假设闭环系统是稳定的,也就是t趋于无穷时,x(t)趋于0.现在把(4)式左边的微分展开,并把状态变量x的微分用(2)式替代得到:
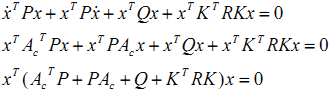
这个式子要始终成立的话,括号里的项必须恒等于0.

这是一个关于K的二次型等式,当然这个二次型是我们不愿看到的,因为计算复杂。现在只要这个等式成立,我们何必不选择K使得两个二次项正好约掉了呢?这样既符合了要求,又简化了计算。取
代入上式得:

(6)
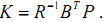
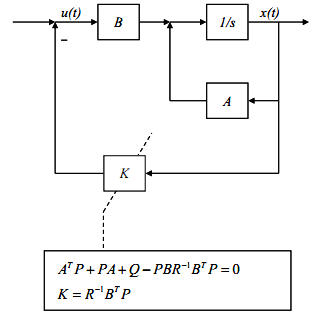
K的二次项没有了,可K的取值和P有关,而P是我们假设的一个量,P只要使得的(6)式成立就行了。而(6)式在现代控制理论中极其重要,它就是有名的Riccati 方程。现在回过头总结下LQR控制器是怎么计算反馈矩阵K的: 1.选择参数矩阵Q,R 2.求解Riccati 方程得到矩阵P 3.计算
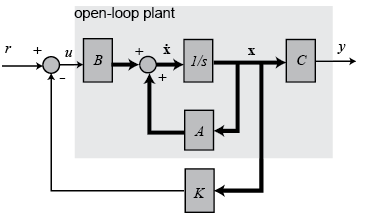
再看看LQR的结构图:
关于它的应用呢,比较典型的就是倒立摆控制器的设计。倒立摆的状态变量为
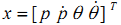
,其中p(t)是小车位置,θ是倒立摆的角度。系统结构如程序所示:[plain] view plain copyA = [0 1 0 0
0 0 -1 0
0 0 0 1
0 0 9 0];
B = [0;0.1;0;-0.1];
C = [0 0 1 0]; %观测角度
D = 0;
Q = [1 0 0 0
0 1 0 0
0 0 10 0
0 0 0 10
];
R = 0.1;
%由上面这个系统,可以计算出K
K = lqr(A,B,Q,R);
Ac = A - B*K;
%对系统进行模拟
x0 = [0.1;0;0.1;0]; %初始状态
t = 0:0.05:20;
u = zeros(size(t));
[y,x]=lsim(Ac,B,C,D,u,t,x0);
plot(t,y);
最后看到角度回到0,即平衡位置,控制器起到了作用,你可以选择不同的Q,R进行对比。 文章为总结性文章,有纰漏,请指出,谢谢。reference:1.F.L. Lewis .<< Linear Quadratic Regulator (LQR) State Feedback Design >>2.http://ctms.engin.umich.edu/CTMS/index.php?example=InvertedPendulum§ion=ControlStateSpace3.http://ctms.engin.umich.edu/CTMS/index.php?example=InvertedPendulum§ion=ControlStateSpace
$(".MathJax").remove();
( 1 )其中
,初始条件是
. 并且假设这个系统的所有状态变量都是可测量到的。 在介绍LQR前,先简单回顾一下现代控制理论中最基本的控制器--全状态反馈控制。 全状态反馈控制系统图形如下:
我们要设计一个状态反馈控制器
使得闭环系统能够满足我们期望的性能。我们把这种控制代入之前的系统状态方程得到
( 2 )对于(1)式的开环系统,由现代控制理论我们知道开环传递函数的极点就是系统矩阵A的特征值。(传递函数的分母是|sI -A|,|·|表示行列式)现在变成了(2)的闭环形式,状态变换矩阵A变成了(A-BK)。因此通过配置反馈矩阵K,可以使得闭环系统的极点达到我们期望的状态。注意,这种控制器的设计与输出矩阵C,D没有关系。 那么,什么样的极点会使得系统性能很棒呢?并且,当系统变量很多的时候,即使设计好了极点,矩阵K也不好计算。 于是,LQR为我们设计最优控制器提供了一种思路。在设计LQR控制器前,我们得设计一个能量函数,最优的控制轨迹应该使得该能量函数最小。一般选取如下形式的能量函数。
,其中Q是你自己设计的半正定矩阵,R为正定矩阵。可是,为什么能量函数(或称系统的目标函数)得设计成这个样子呢? 首先假设状态向量x(t)是1维的,那么
其实就是一个平方项 Qx^2 >= 0,
同理. 能量函数J要最小,那么状态向量x(t),u(t)都得小。J最小,那肯定是个有界的函数,我们能推断当t趋于无穷时,状态向量x(t)将趋于0,这也保证了闭环系统的稳定性。那输入u(t)要小是什么意思呢?它意味着我们用最小的控制代价得到最优的控制。譬如控制电机,输入PWM小,将节省能量。 再来看看矩阵Q,R的选取,一般来说,Q值选得大意味着,要使得J小,那x(t)需要更小,也就是意味着闭环系统的矩阵(A-BK)的特征值处于S平面左边更远的地方,这样状态x(t)就以更快的速度衰减到0。另一方面,大的R表示更加关注输入变量u(t),u(t)的减小,意味着状态衰减将变慢。同时,Q为半正定矩阵意味着他的特征值非负,R为正定矩阵意味着它的特征值为正数。如果你选择Q,R都是对角矩阵的话,那么Q的对角元素为正数,允许出现几个0.R的对角元素只能是正数。 注意LQR调节器是将状态调节到0,这与轨迹跟踪不同,轨迹跟踪是使得系统误差为0. 知道了背景后,那如何设计反馈矩阵K使得能量函数J最小呢?很多地方都是从最大值原理,Hamilton函数推导出来。这里用另外一种更容易接受的方式推导。将u = -Kx 代入之前的能量函数得到:
( 3 )
为了找到K,我们先不防假设存在一个常量矩阵P使得:
(4)代入(3)式得:
(5)注意,我们已经假设闭环系统是稳定的,也就是t趋于无穷时,x(t)趋于0.现在把(4)式左边的微分展开,并把状态变量x的微分用(2)式替代得到:
这个式子要始终成立的话,括号里的项必须恒等于0.
这是一个关于K的二次型等式,当然这个二次型是我们不愿看到的,因为计算复杂。现在只要这个等式成立,我们何必不选择K使得两个二次项正好约掉了呢?这样既符合了要求,又简化了计算。取
代入上式得:
(6)
K的二次项没有了,可K的取值和P有关,而P是我们假设的一个量,P只要使得的(6)式成立就行了。而(6)式在现代控制理论中极其重要,它就是有名的Riccati 方程。现在回过头总结下LQR控制器是怎么计算反馈矩阵K的: 1.选择参数矩阵Q,R 2.求解Riccati 方程得到矩阵P 3.计算
再看看LQR的结构图:
关于它的应用呢,比较典型的就是倒立摆控制器的设计。倒立摆的状态变量为
,其中p(t)是小车位置,θ是倒立摆的角度。系统结构如程序所示:[plain] view plain copyA = [0 1 0 0
0 0 -1 0
0 0 0 1
0 0 9 0];
B = [0;0.1;0;-0.1];
C = [0 0 1 0]; %观测角度
D = 0;
Q = [1 0 0 0
0 1 0 0
0 0 10 0
0 0 0 10
];
R = 0.1;
%由上面这个系统,可以计算出K
K = lqr(A,B,Q,R);
Ac = A - B*K;
%对系统进行模拟
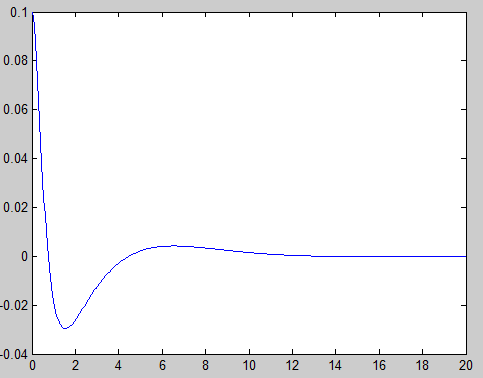
x0 = [0.1;0;0.1;0]; %初始状态
t = 0:0.05:20;
u = zeros(size(t));
[y,x]=lsim(Ac,B,C,D,u,t,x0);
plot(t,y);
最后看到角度回到0,即平衡位置,控制器起到了作用,你可以选择不同的Q,R进行对比。 文章为总结性文章,有纰漏,请指出,谢谢。reference:1.F.L. Lewis .<< Linear Quadratic Regulator (LQR) State Feedback Design >>2.http://ctms.engin.umich.edu/CTMS/index.php?example=InvertedPendulum§ion=ControlStateSpace3.http://ctms.engin.umich.edu/CTMS/index.php?example=InvertedPendulum§ion=ControlStateSpace
$(".MathJax").remove();

相关文章推荐
- LQR 的直观推导及简单应用
- LQR 的直观推导及简单应用
- 简述LDA,PCA,SVD原理推导及其简单应用
- 会话、保存会话方法之Cookie、简单的Cookie应用(直观详细)
- 使用Process进行DOS命令交互的简单应用
- 关于jquery插件datatables的简单应用
- li的简单应用(将前面的点换成图标)
- iOS开发UI篇—实现一个简单的手势解锁应用(基本)
- Unity编程笔录--Tango创建一个简单AR应用
- Cocos2d-X中使用CCTextFieldTTF的简单应用显示文本和弹出软键盘
- UVALive 6091 并查集简单应用
- 简单定时器及中断的应用(9999倒计数)
- UISegementControl切换简单应用
- WebBrowser控件的简单应用
- webpack简单应用
- 1、mongodb的安装及简单应用
- Ajax简单应用例子
- Javassist简单应用 - 不用学习JVM知识也可以修改class文件
- QuickPart应用(1)-----利用QuickPart制作一个简单的webpart
- webpack+Vue.js+vue-router的一个简单实例应用