RGBD-SLAM V2的学习和测试(二)
2018-03-25 12:18
232 查看
PC环境:Ubuntu14.04+ROS indigo+Opencv 2.4.10+PCL+RGBDSLAM v2
其中ROS indigo+Opencv 2.4.10+PCL+RGBDSLAM v2 的安装和测试我在另一篇文章中讲到了,大家可以自行去看。
现在要讲的是在没有kinect深度相机的情况下,我们如何来测试RGBDSLAM v2这个系统。
1、下载公开数据集(注意要下载成.bag格式)
http://vision.in.tum.de/data/datasets/rgbd-dataset

点击后面的more info来下载.bag格式的数据集。
2、开始测试
打开一个终端
运行结果如下

3、打开另一个终端
cd 到数据集的路径(我的数据集放在~/rgbdslam_catkin_ws/src/rgbdslam_v2-indigo/test)
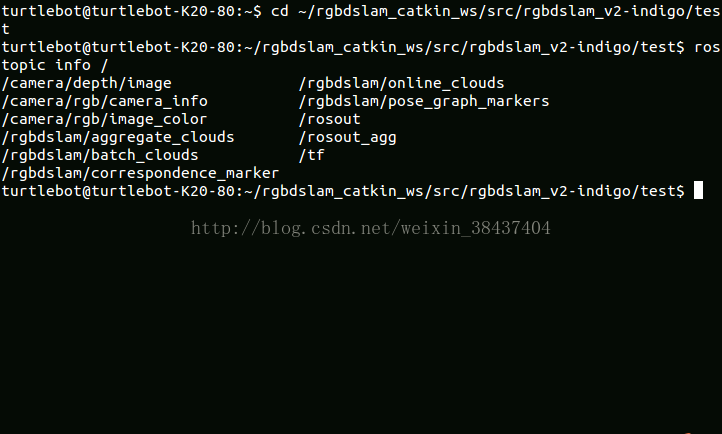
然后rostopic info+tab键,再双击tab键得到数据包的信息
将rgbdslam.launch中第8、9行的参数改为数据集的参数即可
然后再运行rosbag play...(我下载的数据集是freiburg_xyz.bag )
运行结果如下图

4、打开一个新的终端运行
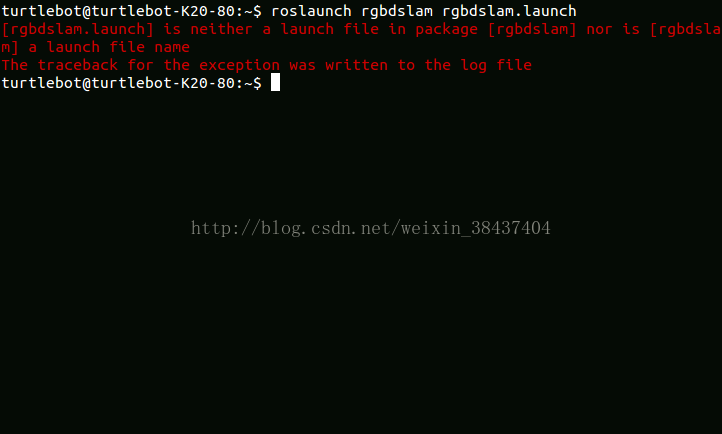
注意在运行 roslaunch rgbdslam rgbdslam.launch之前必须运行
否则会出现如下的错误
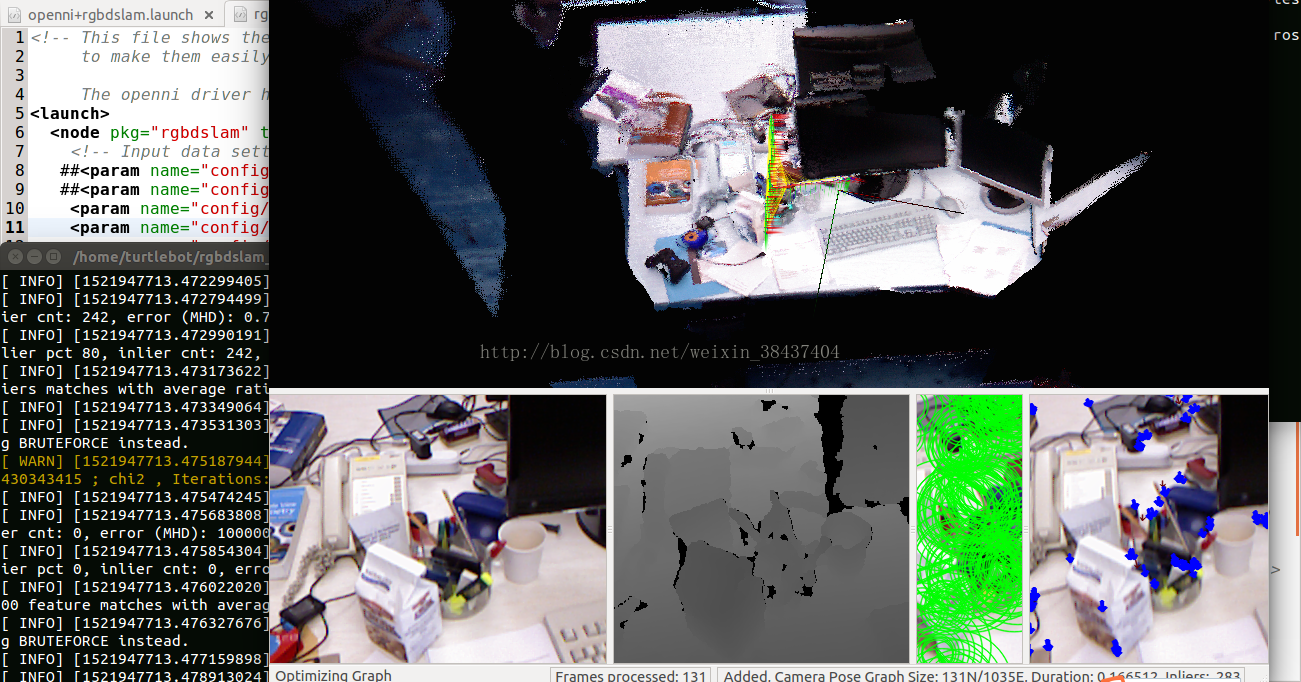
最后,就可以在UI界面看到运行后的结果啦啦啦。
如果运行roslaunch之后UI界面没有显示,则返回上一终端再次运行rosbag play ...
其中ROS indigo+Opencv 2.4.10+PCL+RGBDSLAM v2 的安装和测试我在另一篇文章中讲到了,大家可以自行去看。
现在要讲的是在没有kinect深度相机的情况下,我们如何来测试RGBDSLAM v2这个系统。
1、下载公开数据集(注意要下载成.bag格式)
http://vision.in.tum.de/data/datasets/rgbd-dataset
点击后面的more info来下载.bag格式的数据集。
2、开始测试
打开一个终端
roscore
运行结果如下
3、打开另一个终端
cd 到数据集的路径(我的数据集放在~/rgbdslam_catkin_ws/src/rgbdslam_v2-indigo/test)
cd ~/rgbdslam_catkin_ws/src/rgbdslam_v2-indigo/test
然后rostopic info+tab键,再双击tab键得到数据包的信息
将rgbdslam.launch中第8、9行的参数改为数据集的参数即可
<param name="config/topic_image_mono" value="/camera/rgb/image_color"/> <param name="config/topic_image_depth" value="/camera/depth/image "/>
然后再运行rosbag play...(我下载的数据集是freiburg_xyz.bag )
rosbag play rgbd_dataset_freiburg1_xyz.bag
运行结果如下图
4、打开一个新的终端运行
roslaunch rgbdslam rgbdslam.launch
注意在运行 roslaunch rgbdslam rgbdslam.launch之前必须运行
source ~/rgbdslam_catkin_ws/devel/setup.bash
否则会出现如下的错误
最后,就可以在UI界面看到运行后的结果啦啦啦。
如果运行roslaunch之后UI界面没有显示,则返回上一终端再次运行rosbag play ...

相关文章推荐
- RGBD-SLAM V2的学习和测试(一)
- RGBD-SLAM V2的学习和测试
- rgbdslam_v2安装并使用
- RGBD-SLAM学习1
- SLAM学习--开源测试数据集合
- rgbdslam_v2实践
- RGBD-SLAM学习3
- 利用华硕Xtion Pro Live 在ROS-kinetic下跑rgbdslam_v2
- RGBD-SLAM尝试——rgbd-slam-v2
- QT中qreal关键字详解(RGBDSLAM_V2)
- rgbdv2 slam安装
- ROS_kinetic下rgbdslam_V2的安装和使用
- RGBD-SLAM学习4
- ORB_SLAM2初学习——RGBD
- 在Ubuntu14.04中编译源码rgbdslam_V2
- RGBD-SLAM学习5
- RGBD-SLAM学习2
- RGBD-SLAM学习6
- 软件测试(第2版)_Paul学习06_02——Ch6等价类测试_02
- 【转】学习使用Jmeter做压力测试(一)--压力测试基本概念