优化算法——粒子群算法(PSO)
2018-03-21 16:56
351 查看
一、粒子群算法的概述
粒子群算法(PSO)属于群智能算法的一种,是通过模拟鸟群捕食行为设计的。假设区域里就只有一块食物(即通常优化问题中所讲的最优解),鸟群的任务是找到这个食物源。鸟群在整个搜寻的过程中,通过相互传递各自的信息,让其他的鸟知道自己的位置,通过这样的协作,来判断自己找到的是不是最优解,同时也将最优解的信息传递给整个鸟群,最终,整个鸟群都能聚集在食物源周围,即我们所说的找到了最优解,即问题收敛。二、粒子群算法的流程
粒子群算法通过设计一种无质量的粒子来模拟鸟群中的鸟,粒子仅具有两个属性:速度和位置
,速度代表移动的快慢,位置代表移动的方向。每个粒子在搜索空间中单独的搜寻最优解,并将其记为当前个体极值
,并将个体极值与整个粒子群里的其他粒子共享,找到最优的那个个体极值作为整个粒子群的当前全局最优解
,粒子群中的所有粒子根据自己找到的当前个体极值
和整个粒子群共享的当前全局最优解
来调整自己的速度和位置。粒子群算法的思想相对比较简单,主要分为:1、初始化粒子群;2、评价粒子,即计算适应值;3、寻找个体极值
;4、寻找全局最优解
;5、修改粒子的速度和位置。下面是程序的流程图:
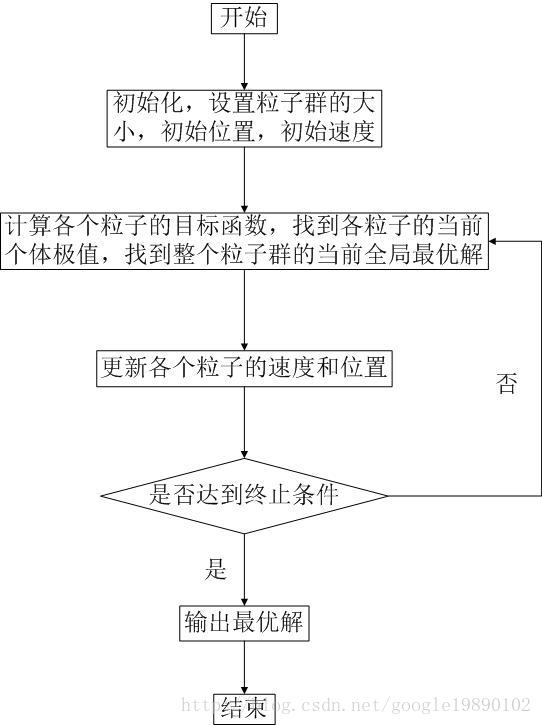
(PSO流程)
下面我们具体解释下流程图里面的每一个步骤:
1、初始化
首先,我们需要设置最大的速度区间,防止超出最大的区间。位置信息即为整个搜索空间,我们在速度区间和搜索空间上随机初始化速度和位置。设置群体规模。
2、个体极值与全局最优解
个体极值为每个粒子找到的历史上最优的位置信息,并从这些个体历史最优解中找到一个全局最优解,并与历史最优解比较,选出最佳的作为当前的历史最优解。3、更新速度和位置的公式
更新公式为:其中,
称为惯性因子,
和
称为加速常数,一般取
。
表示区间
上的随机数。
表示第
个变量的个体极值的第
维。
表示全局最优解的第
维。
4、终止条件
有两种终止条件可以选择,一是最大代数:;二是相邻两代之间的偏差在一个指定的范围内即停止。我们在实验中选择第一种。
三、实验
我们选择的测试函数是:Griewank。其基本形式如下:图像为:
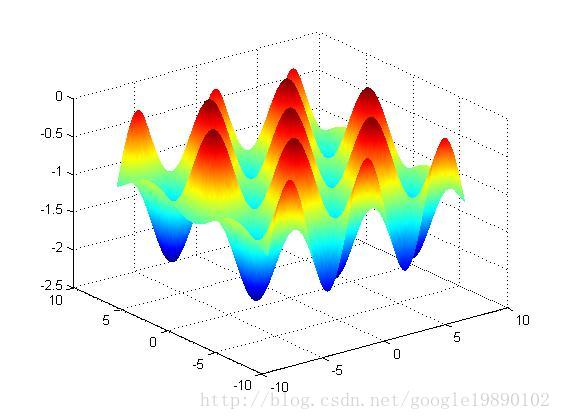
(Griewank函数图像)在实验中我们选择的维数是20;MATLAB程序代码如下:主程序:[plain] view plain copy c1=2;%学习因子
c2=2;%学习因子
Dimension=20;
Size=30;
Tmax=500;
Velocity_max=1200;%粒子最大速度
F_n=2;%测试函数名
Fun_Ub=600;%函数上下界
Fun_Lb=-600;
Position=zeros(Dimension,Size);%粒子位置
Velocity=zeros(Dimension,Size);%粒子速度
Vmax(1:Dimension)=Velocity_max;%粒子速度上下界
Vmin(1:Dimension)=-Velocity_max;
Xmax(1:Dimension)=Fun_Ub;%粒子位置上下界,即函数自变量的上下界
Xmin(1:Dimension)=Fun_Lb;
[Position,Velocity]=Initial_position_velocity(Dimension,Size,Xmax,Xmin,Vmax,Vmin);
Pbest_position=Position;%粒子的历史最优位置,初始值为粒子的起始位置,存储每个粒子的历史最优位置
Gbest_position=zeros(Dimension,1);%全局最优的那个粒子所在位置,初始值认为是第1个粒子
for j=1:Size
Pos=Position(:,j);%取第j列,即第j个粒子的位置
fz(j)=Fitness_Function(Pos,F_n,Dimension);%计算第j个粒子的适应值
end
[Gbest_Fitness,I]=min(fz);%求出所有适应值中最小的那个适应值,并获得该粒子的位置
Gbest_position=Position(:,I);%取最小适应值的那个粒子的位置,即I列
for itrtn=1:Tmax
time(itrtn)=itrtn;
Weight=1;
r1=rand(1);
r2=rand(1);
for i=1:Size
Velocity(:,i)=Weight*Velocity(:,i)+c1*r1*(Pbest_position(:,i)-Position(:,i))+c2*r2*(Gbest_position-Position(:,i));
end
%限制速度边界
for i=1:Size
for row=1:Dimension
if Velocity(row,i)>Vmax(row)
Veloctity(row,i)=Vmax(row);
elseif Velocity(row,i)<Vmin(row)
Veloctity(row,i)=Vmin(row);
else
end
end
end
Position=Position+Velocity;
%限制位置边界
for i=1:Size
for row=1:Dimension
if Position(row,i)>Xmax(row)
Position(row,i)=Xmax(row);
elseif Position(row,i)<Xmin(row)
Position(row,i)=Xmin(row);
else
end
end
end
for j=1:Size
P_position=Position(:,j)';%取一个粒子的位置
fitness_p(j)=Fitness_Function(P_position,F_n,Dimension);
if fitness_p(j)< fz(j) %粒子的适应值比运动之前的适应值要好,更新原来的适应值
Pbest_position(:,j)=Position(:,j);
fz(j)=fitness_p(j);
end
if fitness_p(j)<Gbest_Fitness
Gbest_Fitness=fitness_p(j);
end
end
[Gbest_Fitness_new,I]=min(fz);%更新后的所有粒子的适应值,取最小的那个,并求出其编号
Best_fitness(itrtn)=Gbest_Fitness_new; %记录每一代的最好适应值
Gbest_position=Pbest_position(:,I);%最好适应值对应的个体所在位置
end
plot(time,Best_fitness);
xlabel('迭代的次数');ylabel('适应度值P_g');
初始化:[plain] view plain copy function [Position,Velocity] = Initial_position_velocity(Dimension,Size,Xmax,Xmin,Vmax,Vmin)
for i=1:Dimension
Position(i,:)=Xmin(i)+(Xmax(i)-Xmin(i))*rand(1,Size); % 产生合理范围内的随机位置,rand(1,Size)用于产生一行Size个随机数
Velocity(i,:)=Vmin(i)+(Vmax(i)-Vmin(i))*rand(1,Size);
end
end
适应值计算:[plain] view plain copy function Fitness=Fitness_Function(Pos,F_n,Dimension)
switch F_n
case 1
Func_Sphere=Pos(:)'*Pos(:);
Fitness=Func_Sphere;
case 2
res1=Pos(:)'*Pos(:)/4000;
res2=1;
for row=1:Dimension
res2=res2*cos(Pos(row)/sqrt(row));
end
Func_Griewank=res1-res2+1;
Fitness=Func_Griewank;
end
最终的收敛曲线:
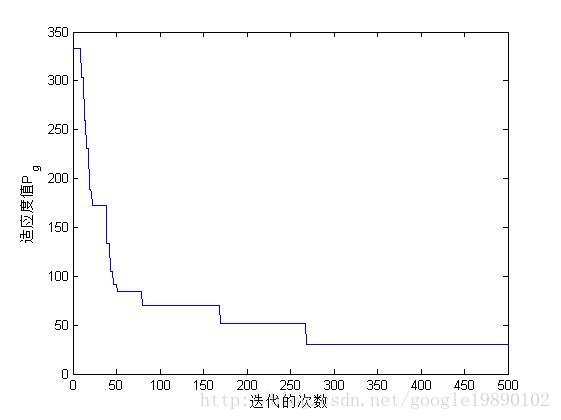
(收敛曲线)

相关文章推荐
- 优化算法——粒子群算法(PSO)
- 优化算法—粒子群算法(PSO)
- PSO:利用PSO算法优化二元函数,寻找最优个体适应度—Jason niu
- 算法(三)粒子群算法PSO的介绍
- 算法(三)粒子群算法PSO的介绍
- (转载)海量数据库的查询优化及分页算法方案 ------sunsnow8
- 斐波那契数列(二)--矩阵优化算法
- 普林斯顿大学公开课 算法1-10:并检查集合-高速整合方法优化
- 优化算法——梯度下降法
- 算法代码实现之Union-Find,Java实现,quick-find、quick-union、加权quick-union(附带路径压缩优化)
- 精灵对网站排名算法大总结--非常不错的网站优化文章
- 像素精确碰撞算法优化
- 海量数据库的查询优化及分页算法方案
- Dijstra 单源最短路径算法 堆优化-1(二维数组存储数据)
- 从一道笔试题谈算法的优化(上)
- 机器学习-python通过序列最小优化算法(SMO)方法编写支持向量机(SVM)
- SQLServer海量数据库的查询优化及分页算法方案
- Spark Mllib里的协调过滤的概念和实现步骤、LS、ALS的原理、ALS算法优化过程的推导、隐式反馈和ALS-WR算法
- SQL Server——海量数据库的查询优化及分页算法方案
- 海量数据库的查询优化及分页算法方案[转帖]