PCL1.6.0与VS2010的配置及测试
2018-03-18 18:22
260 查看
一、PLC1.6.0的下载
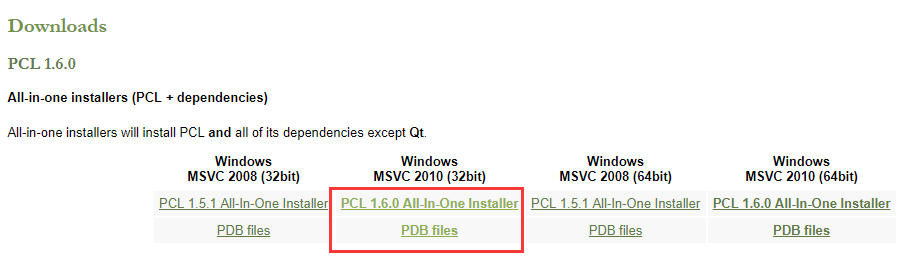
官网下载地址:http://pointclouds.org/downloads/windows.html
下载“PCL 1.6.0 All-In-One Install”(.exe文件)和“PDB files”(.zip文件)
安装大概五六分钟后会跳出关于OpenNI的安装,选择安装路径,若没出现问题表示安装完成,不需要进行下面两个步骤。
最后解压下载的PDB文件到PCL安装文件夹的bin目录下
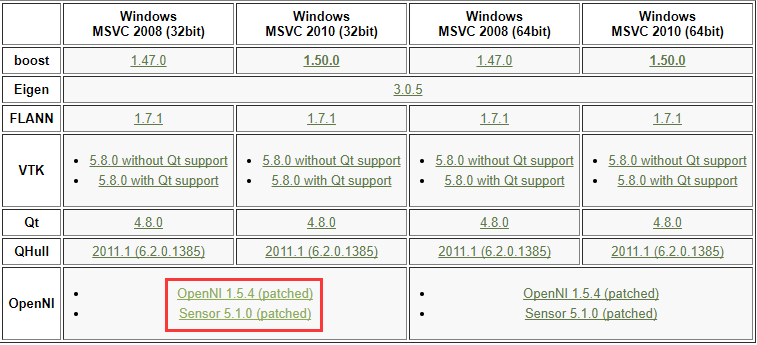
则需要去官网下载“OpenNI 1.5.4(patched)”和“Sensor 5.1.0(patched)”
首先安装OpenNI1.5.4,路径根据自己的意愿设置
接着安装Sensor 5.1.0,路径根据自己的意愿设置
第三步安装PCL1.6.0,点击“下一步”继续,设置路径,接下需要选择组建,点击展开“3rd Party Library”,由于之前已经安装了openni1.5.4,所以这里选择不再安装openni了,将openni前面框框中的勾去掉,点击下一步开始安装,等待安装完成。
最后解压下载的PDB文件到PCL安装文件夹的bin目录下。

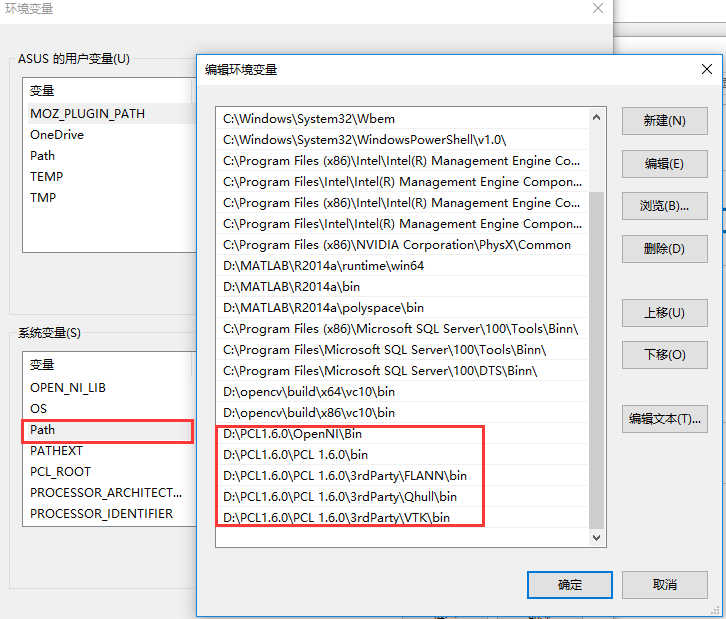
在系统变量的Path中添加以下路径,根据自己安装的文件夹相应进行添加
注意:在环境变量配置完之后需要重启计算机使环境变量生效。
添加以下:opengl32.lib
pcl_kdtree_debug.lib
pcl_io_debug.lib
pcl_search_debug.lib
pcl_segmentation_debug.lib
pcl_apps_debug.lib
pcl_features_debug.lib
pcl_filters_debug.lib
pcl_visualization_debug.lib
pcl_common_debug.lib
flann_cpp_s-gd.lib
libboost_system-vc100-mt-gd-1_47.lib
libboost_filesystem-vc100-mt-gd-1_47.lib
libboost_thread-vc100-mt-gd-1_47.lib
libboost_date_time-vc100-mt-gd-1_47.lib
libboost_iostreams-vc100-mt-gd-1_47.lib
vtkalglib-gd.lib
vtkCharts-gd.lib
vtkCommon-gd.lib
vtkDICOMParser-gd.lib
vtkexoIIc-gd.lib
vtkexpat-gd.lib
vtkFiltering-gd.lib
vtkfreetype-gd.lib
vtkftgl-gd.lib
vtkGenericFiltering-gd.lib
vtkGeovis-gd.lib
vtkGraphics-gd.lib
vtkhdf5-gd.lib
vtkHybrid-gd.lib
vtkImaging-gd.lib
vtkInfovis-gd.lib
vtkIO-gd.lib
vtkjpeg-gd.lib
vtklibxml2-gd.lib
vtkmetaio-gd.lib
vtkNetCDF-gd.lib
vtkNetCDF_cxx-gd.lib
vtkpng-gd.lib
vtkproj4-gd.lib
vtkRendering-gd.lib
vtksqlite-gd.lib
vtksys-gd.lib
vtktiff-gd.lib
vtkverdict-gd.lib
vtkViews-gd.lib
vtkVolumeRendering-gd.lib
vtkWidgets-gd.lib
vtkzlib-gd.lib
#include <iostream>
#include <pcl/io/io.h>
#include <pcl/io/pcd_io.h>
int user_data;
void viewerOneOff (pcl::visualization::PCLVisualizer& viewer)
{
viewer.setBackgroundColor (1.0, 0.5, 1.0);
pcl::PointXYZ o;
o.x = 1.0;
o.y = 0;
o.z = 0;
viewer.addSphere (o, 0.25, "sphere", 0);
std::cout << "i only run once" << std::endl;
}
void viewerPsycho (pcl::visualization::PCLVisualizer& viewer)
{
static unsigned count = 0;
std::stringstream ss;
ss << "Once per viewer loop: " << count++;
viewer.removeShape ("text", 0);
viewer.addText (ss.str(), 200, 300, "text", 0);
//FIXME: possible race condition here:
user_data++;
}
int main ()
{
pcl::PointCloud<pcl::PointXYZRGBA>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZRGBA>);
pcl::io::loadPCDFile ("D:\\Microsoft Visual Studio 10.0\\Projects\\pcl\\pcl\\my_point_cloud.pcd", *cloud);
pcl::visualization::CloudViewer viewer("Cloud Viewer");
//blocks until the cloud is actually rendered
viewer.showCloud(cloud);
//use the following functions to get access to the underlying more advanced/powerful
//PCLVisualizer
//This will only get called once
viewer.runOnVisualizationThreadOnce (viewerOneOff);
//This will get called once per visualization iteration
viewer.runOnVisualizationThread (viewerPsycho);
while (!viewer.wasStopped ())
{
//you can also do cool processing here
//FIXME: Note that this is running in a separate thread from viewerPsycho
//and you should guard against race conditions yourself...
user_data++;
}
return 0;
} 其中.pcd文件需要放在和.cpp文件同一文件夹下pcl::io::loadPCDFile ("D:\\Microsoft Visual Studio 10.0\\Projects\\pcl\\pcl\\my_point_cloud.pcd", *cloud); .pcd文件的下载地址:链接:https://pan.baidu.com/s/1BaUQ0D345WMTet-ejkQ_Yw 密码:yewy
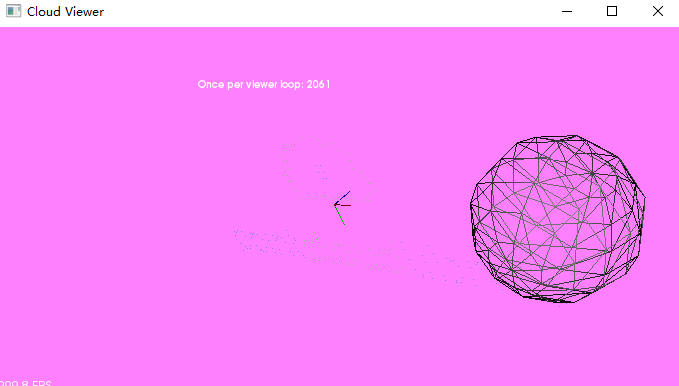
运行结果:需要滑动鼠标进行大小变化和旋转。
链接:https://pan.baidu.com/s/1kXIaX1zvhnBTohBIwQouzw 密码:po4n
官网下载地址:http://pointclouds.org/downloads/windows.html
下载“PCL 1.6.0 All-In-One Install”(.exe文件)和“PDB files”(.zip文件)
二、PCL1.6.0安装
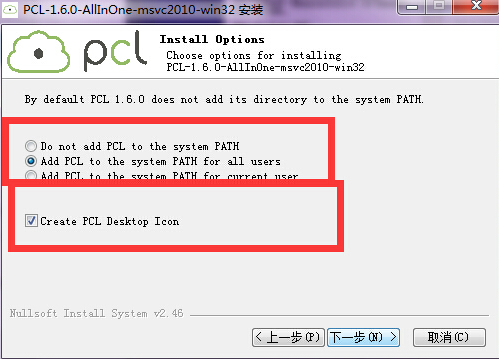
1、正常安装
双击“PCL 1.6.0 All-In-One Install”开始安装,勾选添加到PATH,之后自定义安装路径安装大概五六分钟后会跳出关于OpenNI的安装,选择安装路径,若没出现问题表示安装完成,不需要进行下面两个步骤。
最后解压下载的PDB文件到PCL安装文件夹的bin目录下
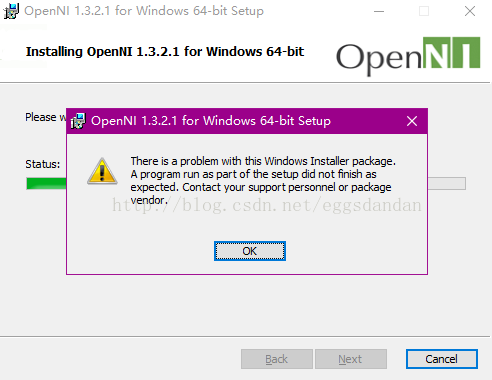
2、安装出现问题
假如安装过程出现下图:则需要去官网下载“OpenNI 1.5.4(patched)”和“Sensor 5.1.0(patched)”
3、重新安装
将原先安装的PCL1.6.0卸载,在安装目录下有“uninstall”的应用程序。首先安装OpenNI1.5.4,路径根据自己的意愿设置
接着安装Sensor 5.1.0,路径根据自己的意愿设置
第三步安装PCL1.6.0,点击“下一步”继续,设置路径,接下需要选择组建,点击展开“3rd Party Library”,由于之前已经安装了openni1.5.4,所以这里选择不再安装openni了,将openni前面框框中的勾去掉,点击下一步开始安装,等待安装完成。
最后解压下载的PDB文件到PCL安装文件夹的bin目录下。
三、环境变量的配置
安装后会在系统变量中出现以下几个变量(添加的属性表中文件相对路径依赖项,没有需要手动添加):在系统变量的Path中添加以下路径,根据自己安装的文件夹相应进行添加
注意:在环境变量配置完之后需要重启计算机使环境变量生效。
四、与vs2010的配置
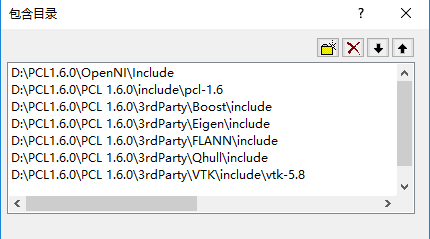
1、包含目录的配置
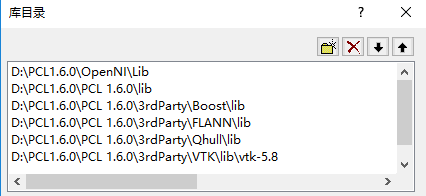
项目-->属性-->配置属性-->VC++目录-->包含目录 //注意检查自己的路径是否正确2、库目录的配置
项目-->属性-->配置属性-->VC++目录-->库目录 //注意检查自己的路径是否正确3、链接器的配置
项目-->属性-->配置属性-->链接器-->输入-->附加依赖项添加以下:opengl32.lib
pcl_kdtree_debug.lib
pcl_io_debug.lib
pcl_search_debug.lib
pcl_segmentation_debug.lib
pcl_apps_debug.lib
pcl_features_debug.lib
pcl_filters_debug.lib
pcl_visualization_debug.lib
pcl_common_debug.lib
flann_cpp_s-gd.lib
libboost_system-vc100-mt-gd-1_47.lib
libboost_filesystem-vc100-mt-gd-1_47.lib
libboost_thread-vc100-mt-gd-1_47.lib
libboost_date_time-vc100-mt-gd-1_47.lib
libboost_iostreams-vc100-mt-gd-1_47.lib
vtkalglib-gd.lib
vtkCharts-gd.lib
vtkCommon-gd.lib
vtkDICOMParser-gd.lib
vtkexoIIc-gd.lib
vtkexpat-gd.lib
vtkFiltering-gd.lib
vtkfreetype-gd.lib
vtkftgl-gd.lib
vtkGenericFiltering-gd.lib
vtkGeovis-gd.lib
vtkGraphics-gd.lib
vtkhdf5-gd.lib
vtkHybrid-gd.lib
vtkImaging-gd.lib
vtkInfovis-gd.lib
vtkIO-gd.lib
vtkjpeg-gd.lib
vtklibxml2-gd.lib
vtkmetaio-gd.lib
vtkNetCDF-gd.lib
vtkNetCDF_cxx-gd.lib
vtkpng-gd.lib
vtkproj4-gd.lib
vtkRendering-gd.lib
vtksqlite-gd.lib
vtksys-gd.lib
vtktiff-gd.lib
vtkverdict-gd.lib
vtkViews-gd.lib
vtkVolumeRendering-gd.lib
vtkWidgets-gd.lib
vtkzlib-gd.lib
五、程序测试
程序如下:#include <pcl/visualization/cloud_viewer.h>#include <iostream>
#include <pcl/io/io.h>
#include <pcl/io/pcd_io.h>
int user_data;
void viewerOneOff (pcl::visualization::PCLVisualizer& viewer)
{
viewer.setBackgroundColor (1.0, 0.5, 1.0);
pcl::PointXYZ o;
o.x = 1.0;
o.y = 0;
o.z = 0;
viewer.addSphere (o, 0.25, "sphere", 0);
std::cout << "i only run once" << std::endl;
}
void viewerPsycho (pcl::visualization::PCLVisualizer& viewer)
{
static unsigned count = 0;
std::stringstream ss;
ss << "Once per viewer loop: " << count++;
viewer.removeShape ("text", 0);
viewer.addText (ss.str(), 200, 300, "text", 0);
//FIXME: possible race condition here:
user_data++;
}
int main ()
{
pcl::PointCloud<pcl::PointXYZRGBA>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZRGBA>);
pcl::io::loadPCDFile ("D:\\Microsoft Visual Studio 10.0\\Projects\\pcl\\pcl\\my_point_cloud.pcd", *cloud);
pcl::visualization::CloudViewer viewer("Cloud Viewer");
//blocks until the cloud is actually rendered
viewer.showCloud(cloud);
//use the following functions to get access to the underlying more advanced/powerful
//PCLVisualizer
//This will only get called once
viewer.runOnVisualizationThreadOnce (viewerOneOff);
//This will get called once per visualization iteration
viewer.runOnVisualizationThread (viewerPsycho);
while (!viewer.wasStopped ())
{
//you can also do cool processing here
//FIXME: Note that this is running in a separate thread from viewerPsycho
//and you should guard against race conditions yourself...
user_data++;
}
return 0;
} 其中.pcd文件需要放在和.cpp文件同一文件夹下pcl::io::loadPCDFile ("D:\\Microsoft Visual Studio 10.0\\Projects\\pcl\\pcl\\my_point_cloud.pcd", *cloud); .pcd文件的下载地址:链接:https://pan.baidu.com/s/1BaUQ0D345WMTet-ejkQ_Yw 密码:yewy
运行结果:需要滑动鼠标进行大小变化和旋转。
六、PCL_Debug.props下载
PCL_Debug.props属性表下载地址:链接:https://pan.baidu.com/s/1kXIaX1zvhnBTohBIwQouzw 密码:po4n

相关文章推荐
- PCL1.6.0配置VS2010
- win7 环境下vs2010环境如何配置点云库PCL1.6.0教程
- OPENNI学习实践-pcl1.6.0+vs2010环境配置以及第一个pcl程序
- PCL学习笔记(1):pcl1.6.0+vs2010环境配置以及第一个pcl程序
- pcl1.6.0+vs2010(x64)配置
- libCURL开源库在VS2010环境下编译安装,配置详解 (测试通过)
- OSG + Win7 64 + VS2010 环境配置测试 按“s” "w" “h”j键没有相应的问题
- PCL学习笔记(一)PCL+VS2010环境配置
- Win7+VS2010(32)+PCL-- 安装+配置+测试
- VS2010 配置PCL1.6.0AII in one 无法启动程序ALL_BUILD
- vs2010在配置完opencv2.4.6进行代码测试问题解决
- win7&win8.1 x64位系统下在VS2010下配置MPICH2&测试&解决scanf不能输入
- 《PCL点云库学习&VS2010(X64)》Part 6 VTK6.2+VS2013+Qt5.5 测试VTK基于VS2013的Qt程序之PCLViewer
- pcl1.6+vs2010配置
- WIN7(32位)VS2010+openCV 2.4.10+PCL 1.6.0+CUDA 6.5.14+CMake 3.2.1+SSBA-3.0配置
- PCL1.7.0+vs2010+cmake3.3.2+win7(64)编译PCL库与环境配置
- PCL学习笔记(一)PCL+VS2010环境配置
- PCL1.6.0+vs2010+win7/xp+32位配置
- VS2010 下OpenGL配置、测试、入门
- PCL VS2010 配置