最小生成树(Kruskal和Prim算法)详细解释
2018-03-18 04:53
936 查看
关于图的几个概念定义:
连通图:在无向图中,若任意两个顶点vivi与vjvj都有路径相通,则称该无向图为连通图。
强连通图:在有向图中,若任意两个顶点vivi与vjvj都有路径相通,则称该有向图为强连通图。
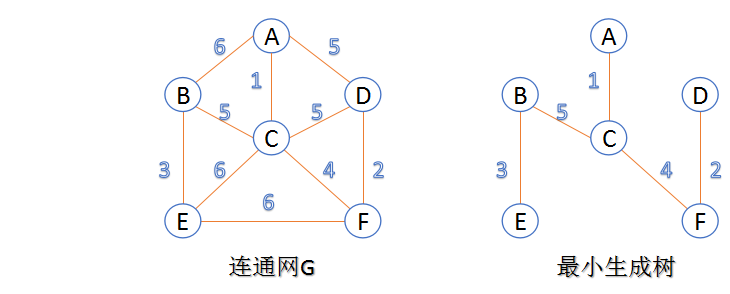
连通网:在连通图中,若图的边具有一定的意义,每一条边都对应着一个数,称为权;权代表着连接连个顶点的代价,称这种连通图叫做连通网。
生成树:一个连通图的生成树是指一个连通子图,它含有图中全部n个顶点,但只有足以构成一棵树的n-1条边。一颗有n个顶点的生成树有且仅有n-1条边,如果生成树中再添加一条边,则必定成环。
最小生成树:在连通网的所有生成树中,所有边的代价和最小的生成树,称为最小生成树。
下面介绍两种求最小生成树算法
1. 把图中的所有边按代价从小到大排序;
2. 把图中的n个顶点看成独立的n棵树组成的森林;
3. 按权值从小到大选择边,所选的边连接的两个顶点ui,viui,vi,应属于两颗不同的树,则成为最小生成树的一条边,并将这两颗树合并作为一颗树。
4. 重复(3),直到所有顶点都在一颗树内或者有n-1条边为止。
图的所有顶点集合为VV;初始令集合u={s},v=V−uu={s},v=V−u;
在两个集合u,vu,v能够组成的边中,选择一条代价最小的边(u0,v0)(u0,v0),加入到最小生成树中,并把v0v0并入到集合u中。
重复上述步骤,直到最小生成树有n-1条边或者n个顶点为止。
由于不断向集合u中加点,所以最小代价边必须同步更新;需要建立一个辅助数组closedge,用来维护集合v中每个顶点与集合u中最小代价边信息,:
2
3
4
5
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
转载:http://blog.csdn.net/luoshixian099/article/details/51908175
连通图:在无向图中,若任意两个顶点vivi与vjvj都有路径相通,则称该无向图为连通图。
强连通图:在有向图中,若任意两个顶点vivi与vjvj都有路径相通,则称该有向图为强连通图。
连通网:在连通图中,若图的边具有一定的意义,每一条边都对应着一个数,称为权;权代表着连接连个顶点的代价,称这种连通图叫做连通网。
生成树:一个连通图的生成树是指一个连通子图,它含有图中全部n个顶点,但只有足以构成一棵树的n-1条边。一颗有n个顶点的生成树有且仅有n-1条边,如果生成树中再添加一条边,则必定成环。
最小生成树:在连通网的所有生成树中,所有边的代价和最小的生成树,称为最小生成树。
下面介绍两种求最小生成树算法
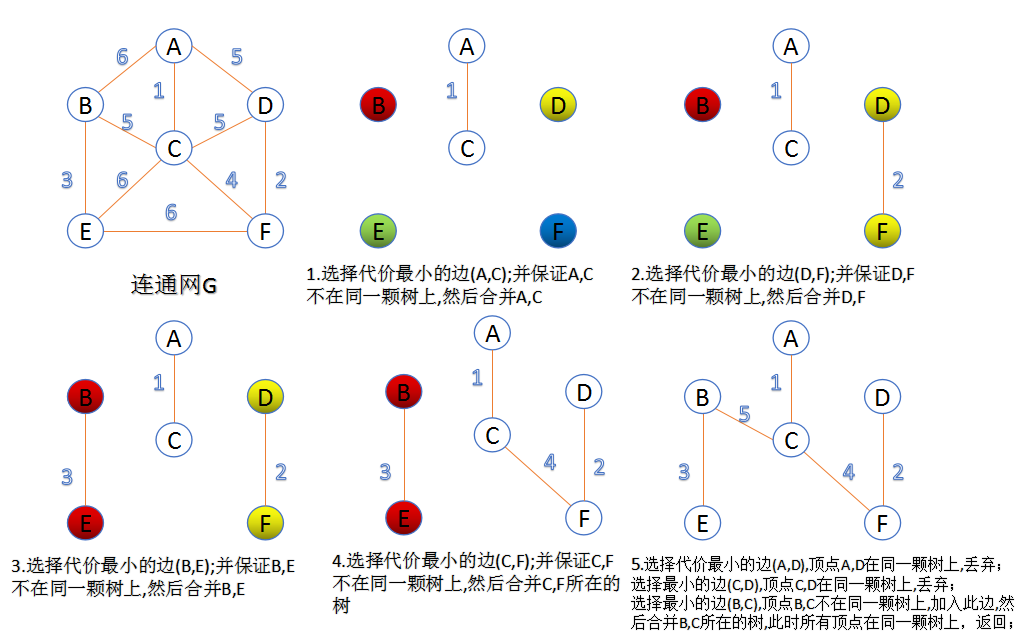
1.Kruskal算法
此算法可以称为“加边法”,初始最小生成树边数为0,每迭代一次就选择一条满足条件的最小代价边,加入到最小生成树的边集合里。1. 把图中的所有边按代价从小到大排序;
2. 把图中的n个顶点看成独立的n棵树组成的森林;
3. 按权值从小到大选择边,所选的边连接的两个顶点ui,viui,vi,应属于两颗不同的树,则成为最小生成树的一条边,并将这两颗树合并作为一颗树。
4. 重复(3),直到所有顶点都在一颗树内或者有n-1条边为止。
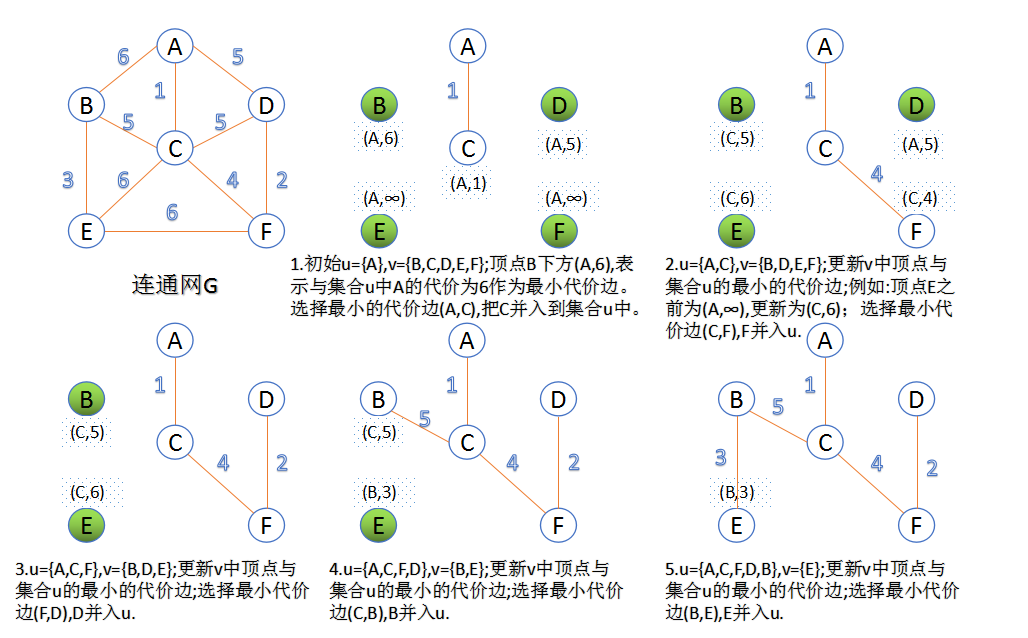
2.Prim算法
此算法可以称为“加点法”,每次迭代选择代价最小的边对应的点,加入到最小生成树中。算法从某一个顶点s开始,逐渐长大覆盖整个连通网的所有顶点。图的所有顶点集合为VV;初始令集合u={s},v=V−uu={s},v=V−u;
在两个集合u,vu,v能够组成的边中,选择一条代价最小的边(u0,v0)(u0,v0),加入到最小生成树中,并把v0v0并入到集合u中。
重复上述步骤,直到最小生成树有n-1条边或者n个顶点为止。
由于不断向集合u中加点,所以最小代价边必须同步更新;需要建立一个辅助数组closedge,用来维护集合v中每个顶点与集合u中最小代价边信息,:
struct
{
char vertexData //表示u中顶点信息
UINT lowestcost //最小代价
}closedge[vexCounts]12
3
4
5
3.完整代码
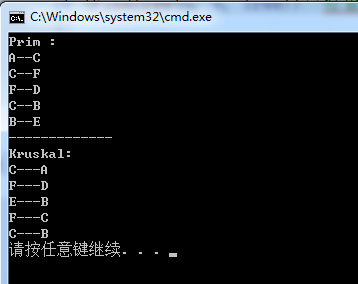
/************************************************************************ CSDN 勿在浮沙筑高台 http://blog.csdn.net/luoshixian099算法导论--最小生成树(Prim、Kruskal)2016年7月14日 ************************************************************************/ #include <iostream> #include <vector> #include <queue> #include <algorithm> using namespace std; #define INFINITE 0xFFFFFFFF #define VertexData unsigned int //顶点数据 #define UINT unsigned int #define vexCounts 6 //顶点数量 char vextex[] = { 'A', 'B', 'C', 'D', 'E', 'F' }; struct node { VertexData data; unsigned int lowestcost; }closedge[vexCounts]; //Prim算法中的辅助信息 typedef struct { VertexData u; VertexData v; unsigned int cost; //边的代价 }Arc; //原始图的边信息 void AdjMatrix(unsigned int adjMat[][vexCounts]) //邻接矩阵表示法 { for (int i = 0; i < vexCounts; i++) //初始化邻接矩阵 for (int j = 0; j < vexCounts; j++) { adjMat[i][j] = INFINITE; } adjMat[0][1] = 6; adjMat[0][2] = 1; adjMat[0][3] = 5; adjMat[1][0] = 6; adjMat[1][2] = 5; adjMat[1][4] = 3; adjMat[2][0] = 1; adjMat[2][1] = 5; adjMat[2][3] = 5; adjMat[2][4] = 6; adjMat[2][5] = 4; adjMat[3][0] = 5; adjMat[3][2] = 5; adjMat[3][5] = 2; adjMat[4][1] = 3; adjMat[4][2] = 6; adjMat[4][5] = 6; adjMat[5][2] = 4; adjMat[5][3] = 2; adjMat[5][4] = 6; } int Minmum(struct node * closedge) //返回最小代价边 { unsigned int min = INFINITE; int index = -1; for (int i = 0; i < vexCounts;i++) { if (closedge[i].lowestcost < min && closedge[i].lowestcost !=0) { min = closedge[i].lowestcost; index = i; } } return index; } void MiniSpanTree_Prim(unsigned int adjMat[][vexCounts], VertexData s) { for (int i = 0; i < vexCounts;i++) { closedge[i].lowestcost = INFINITE; } closedge[s].data = s; //从顶点s开始 closedge[s].lowestcost = 0; for (int i = 0; i < vexCounts;i++) //初始化辅助数组 { if (i != s) { closedge[i].data = s; closedge[i].lowestcost = adjMat[s][i]; } } for (int e = 1; e <= vexCounts -1; e++) //n-1条边时退出 { int k = Minmum(closedge); //选择最小代价边 cout << vextex[closedge[k].data] << "--" << vextex[k] << endl;//加入到最小生成树 closedge[k].lowestcost = 0; //代价置为0 for (int i = 0; i < vexCounts;i++) //更新v中顶点最小代价边信息 { if ( adjMat[k][i] < closedge[i].lowestcost) { closedge[i].data = k; closedge[i].lowestcost = adjMat[k][i]; } } } } void ReadArc(unsigned int adjMat[][vexCounts],vector<Arc> &vertexArc) //保存图的边代价信息 { Arc * temp = NULL; for (unsigned int i = 0; i < vexCounts;i++) { for (unsigned int j = 0; j < i; j++) { if (adjMat[i][j]!=INFINITE) { temp = new Arc; temp->u = i; temp->v = j; temp->cost = adjMat[i][j]; vertexArc.push_back(*temp); } } } } bool compare(Arc A, Arc B) { return A.cost < B.cost ? true : false; } bool FindTree(VertexData u, VertexData v,vector<vector<VertexData> > &Tree) { unsigned int index_u = INFINITE; unsigned int index_v = INFINITE; for (unsigned int i = 0; i < Tree.size();i++) //检查u,v分别属于哪颗树 { if (find(Tree[i].begin(), Tree[i].end(), u) != Tree[i].end()) index_u = i; if (find(Tree[i].begin(), Tree[i].end(), v) != Tree[i].end()) index_v = i; } if (index_u != index_v) //u,v不在一颗树上,合并两颗树 { for (unsigned int i = 0; i < Tree[index_v].size();i++) { Tree[index_u].push_back(Tree[index_v][i]); } Tree[index_v].clear(); return true; } return false; } void MiniSpanTree_Kruskal(unsigned int adjMat[][vexCounts]) { vector<Arc> vertexArc; ReadArc(adjMat, vertexArc);//读取边信息 sort(vertexArc.begin(), vertexArc.end(), compare);//边按从小到大排序 vector<vector<VertexData> > Tree(vexCounts); //6棵独立树 for (unsigned int i = 0; i < vexCounts; i++) { Tree[i].push_back(i); //初始化6棵独立树的信息 } for (unsigned int i = 0; i < vertexArc.size(); i++)//依次从小到大取最小代价边 { VertexData u = vertexArc[i].u; VertexData v = vertexArc[i].v; if (FindTree(u, v, Tree))//检查此边的两个顶点是否在一颗树内 { cout << vextex[u] << "---" << vextex[v] << endl;//把此边加入到最小生成树中 } } } int main() { unsigned int adjMat[vexCounts][vexCounts] = { 0 }; AdjMatrix(adjMat); //邻接矩阵 cout << "Prim :" << endl; MiniSpanTree_Prim(adjMat,0); //Prim算法,从顶点0开始. cout << "-------------" << endl << "Kruskal:" << endl; MiniSpanTree_Kruskal(adjMat);//Kruskal算法 return 0; }1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
转载:http://blog.csdn.net/luoshixian099/article/details/51908175

相关文章推荐
- 1.1.2最小生成树(Kruskal和Prim算法)
- 【算法】最小生成树(Kruskal和Prim算法)
- 最小生成树 Kruskal 算法 和 Prim算法
- 最小生成树 Kruskal和Prim算法
- 最小生成树(Kruskal和Prim算法)
- 第七章-图(5)图的最小生成树(Kruskal和Prim算法)
- 最小生成树(Kruskal和Prim算法)
- 最小生成树算法 :Prim算法 和 Kruskal 算法
- HDU 3228 题解(最小生成树)(Kruskal)(内有详细注释)
- 最小生成树-还是畅通工程 (Kruskal和Prim算法)
- 转 最小生成树(kruskal 算法 和prim算法)
- python最小生成树kruskal与prim算法
- 最小生成树-prim算法和kruskal
- 算法导论--最小生成树(Kruskal和Prim算法)
- hdu 1233 还是畅通工程(最小生成树的Prim和Kruskal两种算法的c++实现)(prim算法详解)
- 最小生成树之Kruskal和Prim算法——C++实现
- 最小生成树(Kruskal和Prim算法)
- 手写matlab的Kruskal最小生成树(注释很详细)
- 最小生成树kruskal与prim算法模板
- hdu 1233 还是畅通工程(最小生成树的Prim和Kruskal两种算法的c++实现)(prim算法详解)