深度学习之生成对抗式神经网络实战
2018-03-11 13:58
549 查看
GAN的目的:产生与真实数据非常相近的假数据
产生器:用于产生假数据
判别器:用于判别真假数据
训练思路:不断使产生器产生假数据,但假数据的标签为真实数据的标签以达到以假乱真的目的,
向判别器不断输入真实数据,标签为真,也不断输入假数据,标签为假,已达到真是真,假是假
的目的
不多说了,贴上代码了,先仔细看看代码然后体会上面的话,有不懂的可以评论import numpy as np
import torch as t
from torch import nn
from torch.utils.data import Dataset,DataLoader
from torch.autograd import Variable
from torchvision import transforms
import ipdb
import tqdm
import fire
import os
import visdom
from PIL import Image
from torchnet.meter import AverageValueMeter
#first step: build your own dataset class and Config class
class Config(object):
path = '/home/szh/DCGAN/data/faces'
imgsize = 96
batch_size = 2048
max_epoch = 200
drop_last=True
num_workers = 4
generator_model_path = '/home/szh/checkpoints/mygenerator_epoch180.pth'
discriminator_model_path = '/home/szh/checkpoints/mydiscriminator_epoch180.pth'
opt = Config()
class MyDataset(Dataset):
def __init__(self,root):
self.imgs = [os.path.join(root,img) for img in os.listdir(root)]
def __getitem__(self,index):
self.transforms = transforms.Compose([
transforms.Resize(opt.imgsize),
transforms.CenterCrop(opt.imgsize),
transforms.ToTensor(),
transforms.Normalize((0.5,0.5,0.5),(0.5,0.5,0.5))]
)
img = Image.open(self.imgs[index])
return self.transforms(img)
def __len__(self):
return len(self.imgs)
#define your generator class
class Generator(nn.Module):
def __init__(self):
super(Generator,self).__init__()
#Hout = (Hin-1)*stride-2*padding+kernel_size
self.net = nn.Sequential(
nn.ConvTranspose2d(100,64*8,4,1,0,bias=False),
nn.BatchNorm2d(64*8),
nn.ReLU(inplace=True),
nn.ConvTranspose2d(64*8,64*4,4,2,1,bias=False),
nn.BatchNorm2d(64*4),
nn.ReLU(inplace=True),
nn.ConvTranspose2d(64*4,64*2,4,2,1,bias=False),
nn.BatchNorm2d(64*2),
nn.ReLU(inplace=True),
nn.ConvTranspose2d(64*2,64,4,2,1,bias=False),
nn.BatchNorm2d(64),
nn.ReLU(inplace=True),
nn.ConvTranspose2d(64,3,5,3,1,bias=False),
nn.Tanh()
)
def forward(self,x):
return self.net(x)
mygenerator = nn.DataParallel(Generator().cuda(),device_ids=[0,1,2,3])
#define your discriminator class
class Discriminator(nn.Module):
def __init__(self):
super(Discriminator,self).__init__()
#Hin = (Hout-1)*stride-2*padding+kernel_size
self.net = nn.Sequential(
nn.Conv2d(3,64,5,3,1,bias=False),
nn.BatchNorm2d(64),
nn.ReLU(inplace=True),
nn.Conv2d(64,64*2,4,2,1,bias=False),
nn.BatchNorm2d(64*2),
nn.ReLU(inplace=True),
nn.Conv2d(64*2,64*4,4,2,1,bias=False),
nn.BatchNorm2d(64*4),
nn.ReLU(inplace=True),
nn.Conv2d(64*4,64*8,4,2,1,bias=False),
nn.BatchNorm2d(64*8),
nn.ReLU(inplace=True),
nn.Conv2d(64*8,1,4,1,0,bias=False),
nn.Sigmoid())
def forward(self,x):
return self.net(x).view(-1)
mydiscriminator = nn.DataParallel(Discriminator().cuda(),device_ids=[0,1,2,3])
#train
def train(**kwargs):
#parse your hyperparameters
for k_,v_ in kwargs.items():
setattr(opt,k_,v_)
#load your data
mydataset = MyDataset(opt.path)
mydataloader = DataLoader(mydataset,batch_size=opt.batch_size,shuffle=True,num_workers=opt.num_workers,drop_last=True)
#initialization of visualization
vis = visdom.Visdom(env='szh')
loss_gmeter = AverageValueMeter()
loss_dmeter = AverageValueMeter()
x_value = 0
#true label、false label and noises
true_labels = Variable(t.ones(opt.batch_size))
false_labels = Variable(t.zeros(opt.batch_size))
noises = Variable(t.randn(opt.batch_size,100,1,1))
#define your optimizer and loss function
generator_optimizer = t.optim.Adam(mygenerator.parameters(),lr=2e-4,betas=(0.5,0.999))
discriminator_optimizer = t.optim.Adam(mydiscriminator.parameters(),lr=2e-4,betas=(0.5,0.999))
criterion = nn.BCELoss()
#use gpu
if t.cuda.is_available:
mygenerator.cuda()
mydiscriminator.cuda()
criterion.cuda()
true_labels,false_labels = true_labels.cuda(),false_labels.cuda()
noises = noises.cuda()
#start training
for i,epoch in enumerate(tqdm.tqdm(range(opt.max_epoch))):
for ii,x in enumerate(tqdm.tqdm(mydataloader)):
#train discriminator every time
discriminator_optimizer.zero_grad()
output = mydiscriminator(Variable(x))
loss_real = criterion(output,true_labels)
loss_real.backward()
gen_img = mygenerator(Variable(t.randn(opt.batch_size,100,1,1).cuda()))
output = mydiscriminator(gen_img)
loss_false = criterion(output,false_labels)
loss_false.backward()
discriminator_optimizer.step()
loss = loss_real + loss_false
loss_dmeter.add(loss.data[0])
#train generator every five times
if ii%5==0:
generator_optimizer.zero_grad()
gen_img = mygenerator(Variable(t.randn(opt.batch_size,100,1,1).cuda()))
output = mydiscriminator(gen_img)
loss_ = criterion(output,true_labels)
loss_.backward()
generator_optimizer.step()
loss_gmeter.add(loss_.data[0])
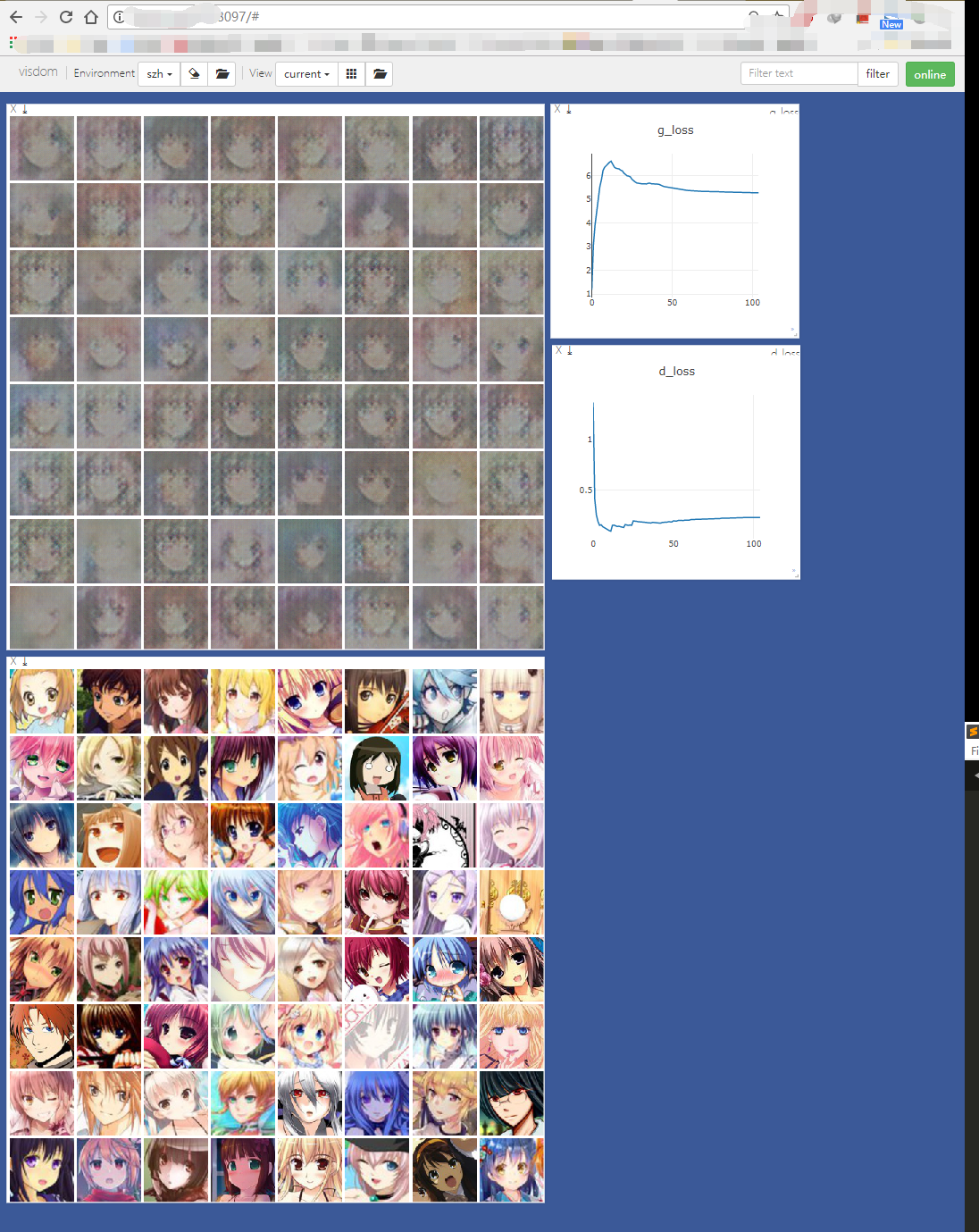
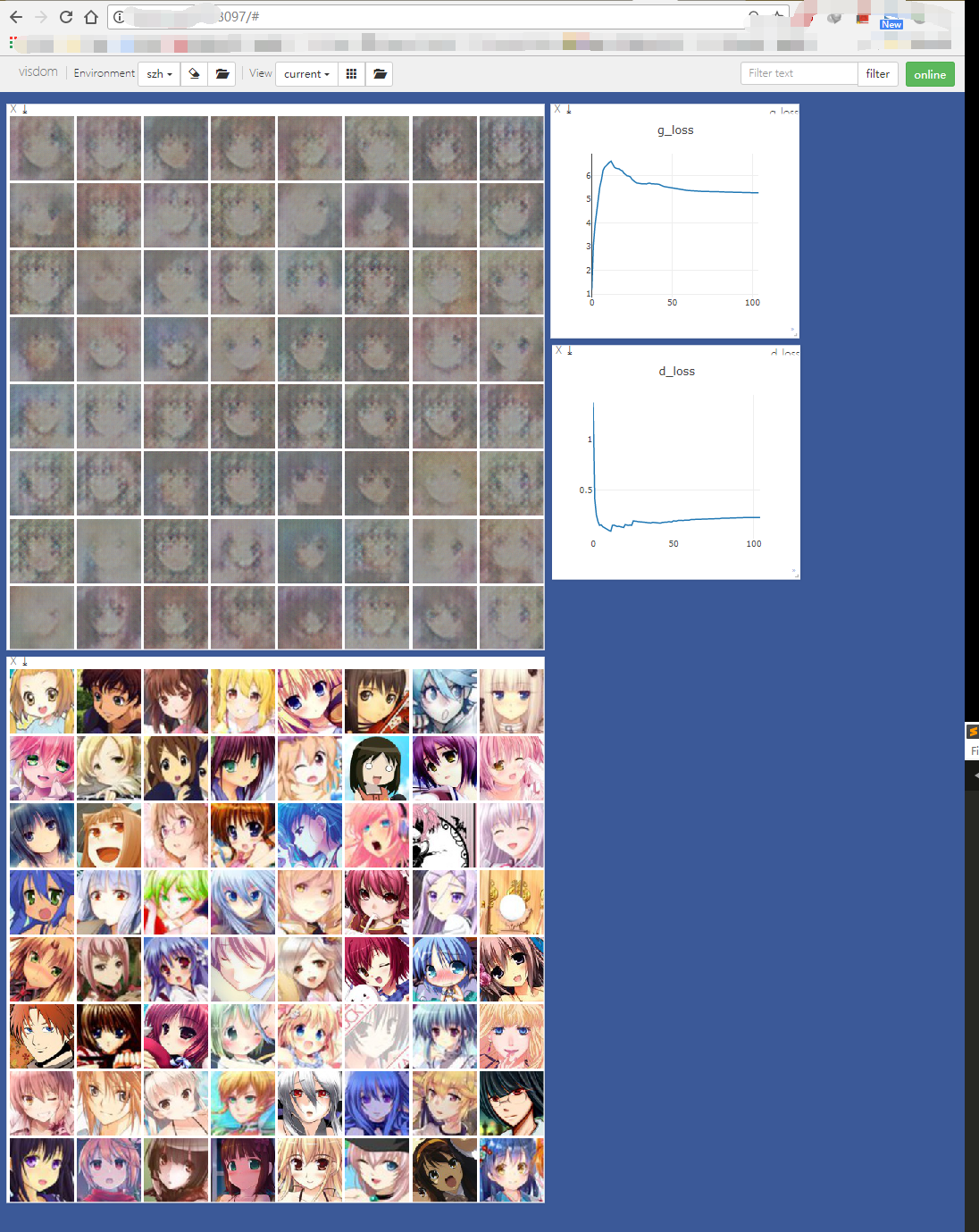
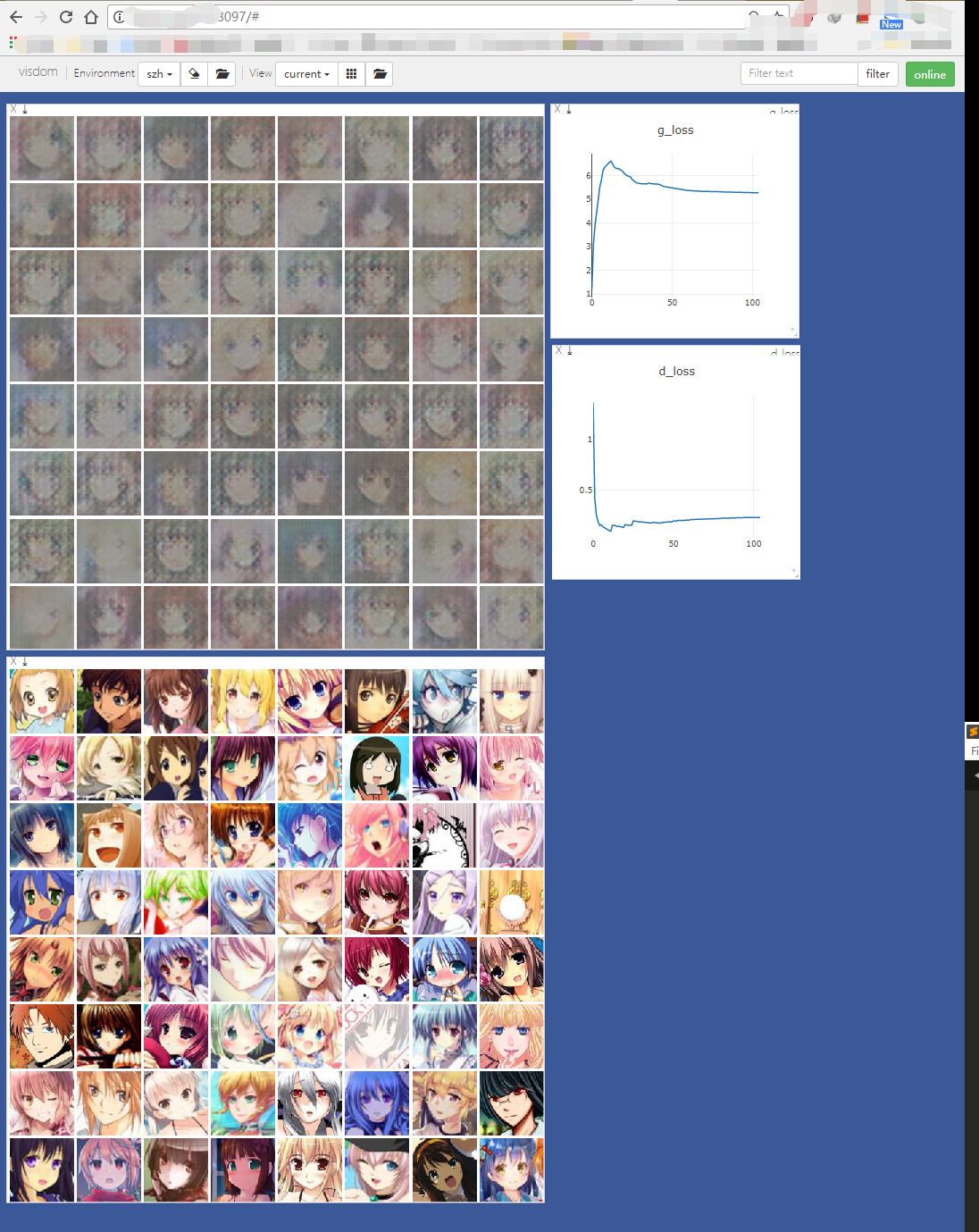
if ii%20==0:
vis.line(Y=np.array([loss_gmeter.value()[0]]), X=np.array([x_value]),
win=('g_loss'),
opts=dict(title='g_loss'),
update=None if x_value == 0 else 'append'
)
vis.line(Y=np.array([loss_dmeter.value()[0]]), X=np.array([x_value]),
win=('d_loss'),
opts=dict(title='d_loss'),
update=None if x_value == 0 else 'append'
)
x_value += 1
#visualize results every 20 epochs and save model
if i%20 == 0:
vis.images(gen_img.data.cpu().numpy()[:64]*0.5+0.5,win='fake')
vis.images(x.cpu().numpy()[:64]*0.5+0.5,win='real')
t.save(mygenerator.state_dict(),'checkpoints/mygenerator_epoch%s.pth'%epoch)
t.save(mydiscriminator.state_dict(),'checkpoints/mydiscriminator_epoch%s.pth'%epoch)
def generate():
vis = visdom.Visdom(env='szh')
map_location = lambda storage,loc:storage
#if you want to load the model then plus the sentence 'nn.DataParallel' otherwise an exception is thrown
testgenerator = nn.DataParallel(Generator().eval().cuda(),device_ids=[0,1,2,3])
testdiscriminator = nn.DataParallel(Discriminator().eval().cuda(),device_ids=[0,1,2,3])
#load model state
testgenerator.load_state_dict(t.load(opt.generator_model_path,map_location=map_location))
testdiscriminator.load_state_dict(t.load(opt.discriminator_model_path,map_location=map_location))
#test 100 noises
noises = Variable(t.randn(100,100,1,1)).cuda()
gen_img = testgenerator(noises)
output = testdiscriminator(gen_img)
#get top10 indexs
indexs = output.data.topk(10)[1]
results = []
for index in indexs:
results.append(gen_img.data[index])
vis.images(t.stack(results).cpu().numpy()*0.5+0.5,win='fake')
if __name__ == '__main__':
fire.Fire()
#how to run
'''
execute in current window:
python -m visdom.server
execute in another window if you want to train:
python mygan.py train --path=[your images path] --batch-size=[your bacth_size]
execute in another window if you want to test:
python mygan.py generate
'''


产生器:用于产生假数据
判别器:用于判别真假数据
训练思路:不断使产生器产生假数据,但假数据的标签为真实数据的标签以达到以假乱真的目的,
向判别器不断输入真实数据,标签为真,也不断输入假数据,标签为假,已达到真是真,假是假
的目的
不多说了,贴上代码了,先仔细看看代码然后体会上面的话,有不懂的可以评论import numpy as np
import torch as t
from torch import nn
from torch.utils.data import Dataset,DataLoader
from torch.autograd import Variable
from torchvision import transforms
import ipdb
import tqdm
import fire
import os
import visdom
from PIL import Image
from torchnet.meter import AverageValueMeter
#first step: build your own dataset class and Config class
class Config(object):
path = '/home/szh/DCGAN/data/faces'
imgsize = 96
batch_size = 2048
max_epoch = 200
drop_last=True
num_workers = 4
generator_model_path = '/home/szh/checkpoints/mygenerator_epoch180.pth'
discriminator_model_path = '/home/szh/checkpoints/mydiscriminator_epoch180.pth'
opt = Config()
class MyDataset(Dataset):
def __init__(self,root):
self.imgs = [os.path.join(root,img) for img in os.listdir(root)]
def __getitem__(self,index):
self.transforms = transforms.Compose([
transforms.Resize(opt.imgsize),
transforms.CenterCrop(opt.imgsize),
transforms.ToTensor(),
transforms.Normalize((0.5,0.5,0.5),(0.5,0.5,0.5))]
)
img = Image.open(self.imgs[index])
return self.transforms(img)
def __len__(self):
return len(self.imgs)
#define your generator class
class Generator(nn.Module):
def __init__(self):
super(Generator,self).__init__()
#Hout = (Hin-1)*stride-2*padding+kernel_size
self.net = nn.Sequential(
nn.ConvTranspose2d(100,64*8,4,1,0,bias=False),
nn.BatchNorm2d(64*8),
nn.ReLU(inplace=True),
nn.ConvTranspose2d(64*8,64*4,4,2,1,bias=False),
nn.BatchNorm2d(64*4),
nn.ReLU(inplace=True),
nn.ConvTranspose2d(64*4,64*2,4,2,1,bias=False),
nn.BatchNorm2d(64*2),
nn.ReLU(inplace=True),
nn.ConvTranspose2d(64*2,64,4,2,1,bias=False),
nn.BatchNorm2d(64),
nn.ReLU(inplace=True),
nn.ConvTranspose2d(64,3,5,3,1,bias=False),
nn.Tanh()
)
def forward(self,x):
return self.net(x)
mygenerator = nn.DataParallel(Generator().cuda(),device_ids=[0,1,2,3])
#define your discriminator class
class Discriminator(nn.Module):
def __init__(self):
super(Discriminator,self).__init__()
#Hin = (Hout-1)*stride-2*padding+kernel_size
self.net = nn.Sequential(
nn.Conv2d(3,64,5,3,1,bias=False),
nn.BatchNorm2d(64),
nn.ReLU(inplace=True),
nn.Conv2d(64,64*2,4,2,1,bias=False),
nn.BatchNorm2d(64*2),
nn.ReLU(inplace=True),
nn.Conv2d(64*2,64*4,4,2,1,bias=False),
nn.BatchNorm2d(64*4),
nn.ReLU(inplace=True),
nn.Conv2d(64*4,64*8,4,2,1,bias=False),
nn.BatchNorm2d(64*8),
nn.ReLU(inplace=True),
nn.Conv2d(64*8,1,4,1,0,bias=False),
nn.Sigmoid())
def forward(self,x):
return self.net(x).view(-1)
mydiscriminator = nn.DataParallel(Discriminator().cuda(),device_ids=[0,1,2,3])
#train
def train(**kwargs):
#parse your hyperparameters
for k_,v_ in kwargs.items():
setattr(opt,k_,v_)
#load your data
mydataset = MyDataset(opt.path)
mydataloader = DataLoader(mydataset,batch_size=opt.batch_size,shuffle=True,num_workers=opt.num_workers,drop_last=True)
#initialization of visualization
vis = visdom.Visdom(env='szh')
loss_gmeter = AverageValueMeter()
loss_dmeter = AverageValueMeter()
x_value = 0
#true label、false label and noises
true_labels = Variable(t.ones(opt.batch_size))
false_labels = Variable(t.zeros(opt.batch_size))
noises = Variable(t.randn(opt.batch_size,100,1,1))
#define your optimizer and loss function
generator_optimizer = t.optim.Adam(mygenerator.parameters(),lr=2e-4,betas=(0.5,0.999))
discriminator_optimizer = t.optim.Adam(mydiscriminator.parameters(),lr=2e-4,betas=(0.5,0.999))
criterion = nn.BCELoss()
#use gpu
if t.cuda.is_available:
mygenerator.cuda()
mydiscriminator.cuda()
criterion.cuda()
true_labels,false_labels = true_labels.cuda(),false_labels.cuda()
noises = noises.cuda()
#start training
for i,epoch in enumerate(tqdm.tqdm(range(opt.max_epoch))):
for ii,x in enumerate(tqdm.tqdm(mydataloader)):
#train discriminator every time
discriminator_optimizer.zero_grad()
output = mydiscriminator(Variable(x))
loss_real = criterion(output,true_labels)
loss_real.backward()
gen_img = mygenerator(Variable(t.randn(opt.batch_size,100,1,1).cuda()))
output = mydiscriminator(gen_img)
loss_false = criterion(output,false_labels)
loss_false.backward()
discriminator_optimizer.step()
loss = loss_real + loss_false
loss_dmeter.add(loss.data[0])
#train generator every five times
if ii%5==0:
generator_optimizer.zero_grad()
gen_img = mygenerator(Variable(t.randn(opt.batch_size,100,1,1).cuda()))
output = mydiscriminator(gen_img)
loss_ = criterion(output,true_labels)
loss_.backward()
generator_optimizer.step()
loss_gmeter.add(loss_.data[0])
if ii%20==0:
vis.line(Y=np.array([loss_gmeter.value()[0]]), X=np.array([x_value]),
win=('g_loss'),
opts=dict(title='g_loss'),
update=None if x_value == 0 else 'append'
)
vis.line(Y=np.array([loss_dmeter.value()[0]]), X=np.array([x_value]),
win=('d_loss'),
opts=dict(title='d_loss'),
update=None if x_value == 0 else 'append'
)
x_value += 1
#visualize results every 20 epochs and save model
if i%20 == 0:
vis.images(gen_img.data.cpu().numpy()[:64]*0.5+0.5,win='fake')
vis.images(x.cpu().numpy()[:64]*0.5+0.5,win='real')
t.save(mygenerator.state_dict(),'checkpoints/mygenerator_epoch%s.pth'%epoch)
t.save(mydiscriminator.state_dict(),'checkpoints/mydiscriminator_epoch%s.pth'%epoch)
def generate():
vis = visdom.Visdom(env='szh')
map_location = lambda storage,loc:storage
#if you want to load the model then plus the sentence 'nn.DataParallel' otherwise an exception is thrown
testgenerator = nn.DataParallel(Generator().eval().cuda(),device_ids=[0,1,2,3])
testdiscriminator = nn.DataParallel(Discriminator().eval().cuda(),device_ids=[0,1,2,3])
#load model state
testgenerator.load_state_dict(t.load(opt.generator_model_path,map_location=map_location))
testdiscriminator.load_state_dict(t.load(opt.discriminator_model_path,map_location=map_location))
#test 100 noises
noises = Variable(t.randn(100,100,1,1)).cuda()
gen_img = testgenerator(noises)
output = testdiscriminator(gen_img)
#get top10 indexs
indexs = output.data.topk(10)[1]
results = []
for index in indexs:
results.append(gen_img.data[index])
vis.images(t.stack(results).cpu().numpy()*0.5+0.5,win='fake')
if __name__ == '__main__':
fire.Fire()
#how to run
'''
execute in current window:
python -m visdom.server
execute in another window if you want to train:
python mygan.py train --path=[your images path] --batch-size=[your bacth_size]
execute in another window if you want to test:
python mygan.py generate
'''

相关文章推荐
- (尤其是训练集验证集的生成)深度学习 tensorflow 实战(2) 实现简单神经网络以及随机梯度下降算法S.G.D
- TensorFlow:实战Google深度学习框架(二)实现简单神经网络
- [action] deep learning 深度学习 tensorflow 实战(2) 实现简单神经网络以及随机梯度下降算法S.G.D
- 深度学习之神经网络(CNN/RNN/GAN) 算法原理+实战
- 深度学习与TensorFlow实战(九)卷积神经网络—Lenet神经网络
- 【神经网络与深度学习】深度学习实战——caffe windows 下训练自己的网络模型
- 深度学习与TensorFlow实战(五)全连接网络基础—模块化搭建神经网络
- 深度学习与TensorFlow实战(八)卷积神经网络基础
- 【备忘】深度学习实战项目-利用RNN与LSTM网络原理进行唐诗生成视频课程
- 【备忘】2017年深度学习项目实战之对抗生成网络视频课程
- 深度学习与神经网络实战:快速构建一个基于神经网络的手写数字识别系统
- 深度学习与TensorFlow实战(四)神经网络优化
- 深度学习与TensorFlow实战(三)TensorFlow概述与神经网络
- 深度学习与TensorFlow实战(十)卷积神经网络—VGG(16)神经网络
- 深度学习DeepLearning.ai系列课程学习总结:8. 多层神经网络代码实战
- 深度学习与计算机视觉系列(7)_神经网络数据预处理,正则化与损失函数
- 深度学习界明星:生成对抗网络与Improving GAN
- 吴恩达(Andrew Ng)深度学习工程师笔记 - 第一门课-神经网络和深度学习-第一周深度学习概论-第四节:为什么深度学习会兴起?
- 深度学习工程师——神经网络和深度学习(第一周)
- Coursera deep learning 吴恩达 神经网络和深度学习 第二周 编程作业 Logistic Regression with a Neural Network mindset