最小生成树的两种寻路算法及证明[上]
2018-03-09 00:00
411 查看
首先,什么是平面连通图?
平面连通图是一个二维网络,网络由节点和边组成,比如我随手画了一个: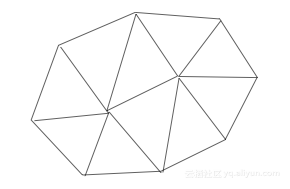
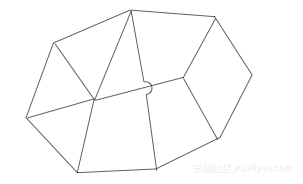
也可以是这样:
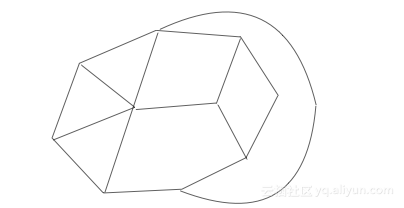
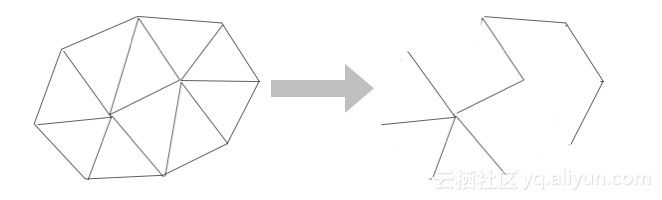
它并不是一个空间连通图因为他可以拓扑变换成这样:
但如果这种图就不行了:
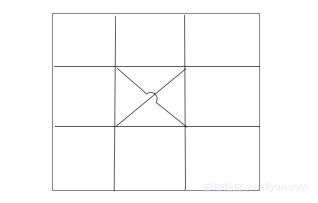
这样的连通图只能出现在三维空间中,所以无法满足欧拉公式.
我有几张阿里云幸运券分享给你,用券购买或者升级阿里云相应产品会有特惠惊喜哦!把想要买的产品的幸运券都领走吧!快下手,马上就要抢光了。
其次,欧拉公式是沃特?
欧拉公式也叫欧拉定理,指在简单多面体上,棱数(边)、面数和点数具有一定的关系:点+面=边+2。而且规定,平面网络属于特殊的一种多面体,想不到吧(关于欧拉定理的详解,请转向我的另一篇论文《浅谈欧拉定理》),这里要注意一下,数面数的时候要算上整个图外侧的那个无穷大的面,也就是环路的数量加上1。因此平面连通图恒满足欧拉定理。 至于我为什么要介绍欧拉公式呢,是为了做准备,后面的最小生成树需要用到它!
然后,生成树有啥特点?
在平面连通图中,我们想要用一个如树枝一般层层分岔但无环的线路经过所有的节点,且这个线路必须被包含于连通图。换个说法就是,在这个连通图中,我们希望删除掉一些边,让剩下所有的边都没有形成环,且剩下的边必须相互连通,不能被隔绝,这就是生成树(spanning tree)。比如这样:
可以看出,不同的删边方法可以得到不同的生成树。 根据欧拉公式,生成树中的面数为1,点数不变还是n,因而得到边数等于n-1,对于连通图中的所有生成树都成立。 还是根据欧拉公式可以证明,此时在生成树中随便增添一条边(这条边当然要属于原连通图中),都必然将多出一个环,增加n条边就产生n个环。 把这张连通图看成一张地图,每个节点都是一个地点,每条边都是可走的路径,这时给每条路径赋予一个权重值,代表这条路径的长短,这在TCP/IP协议中叫做度量值或开销(cost),所以这里权值越大,路径开销反而越大。 因此,不同的生成树的总开销未必相同,其中总开销最小的就成为了本文探讨的最小生成树。 还可以看出,在树上,任意两点之间走的路径是最短距离(放之于原来的连通图比较来说)的可能性很小。所以最小生成树不是地图上寻路的最好方法。
之后,求最小生成树的两种重要算法
以上都是最基础的铺垫部分,写教程就这点麻烦,一定要从知识的根源开始讲起。那么废话不再多说,直接上算法:kruskal(克鲁斯卡尔)算法和prim(普利木)算法。这两个算法是计算最小生成树最常用的算法没有之一,因为他们既简单又完美,况且他们有很多的相似之处。
Kruskal Algorithm
前期准备:
相关文章推荐
- 最小生成树的两种寻路算法及证明[上]
- 最小生成树两种算法检验hdu 1233
- 最小生成树-两种算法复杂度比较 poj-1258,2485
- 带你辨析最小生成树的两种算法
- 最小生成树的两种算法:Prim和Kruskal算法
- 浅谈最小生成树的两种算法
- [置顶] 图的两种最小生成树算法之C++封装
- 最小生成树的两种算法图解(Kruskal与prim)
- 图的最小生成树的两种算法
- 图的深度优先搜索和广度优先搜索算法、最小生成树两种算法 --C++实现
- 最小生成树的两种算法总结(克鲁斯塔尔,prim)
- hdu1102 Constructing Roads(两种基础最小生成树算法)
- 树:最小生成树-两种算法
- 最小生成树的两种最基本的算法
- (搬运) poj 1751(Highways)+最小生成树两种算法
- [Sicily 1090 Highways] 求最小生成树的两种算法(普里姆算法/克鲁斯卡尔算法)
- 最小生成树两种算法比较与实现
- (搬运) poj 1751(Highways)+最小生成树两种算法
- 最小生成树两种算法。kruskal和prim
- POJ-1251 Jungle Roads 最小生成树 两种算法的简单模板