Stable Platform Systems (稳定平台系统) Strapdown Systems(捷联系统)
2018-03-07 16:15
405 查看
几乎所有的惯导系统分为两类:稳定平台惯导系统和捷联惯导系统。两个系统的区别在于陀螺仪和加速度计数据的参考坐标系之间的差异。
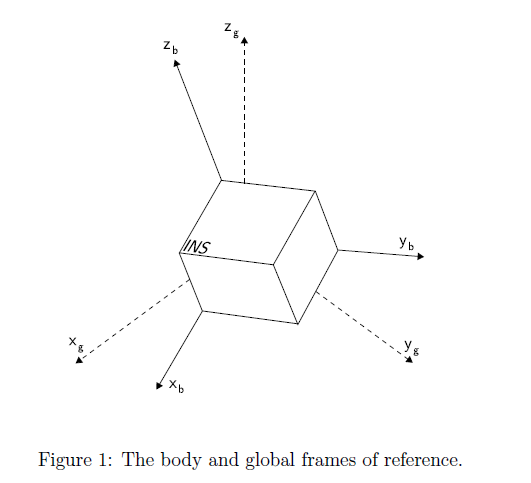
在稳定平台惯导系统中,稳定平台的轴坐标系是和global frame即全局坐标系统是一致的,而惯性测量单元就是安装在稳定平台上,陀螺仪可以检测到平台的旋转,然后这些旋转信号反馈到系统的转矩电机,转矩电机会旋转系统的平衡环以抵消掉这些的旋转,使得稳定平台和全局坐标系一致。

在稳定平台系统中,设备的方向信息可以直接从系统中读取,设备位置的计算需要对平台上的加速度计通过二次积分获得(注意,积分前需要从垂直方向上减掉重力加速度)。可以认为惯性测量的数据都是全局坐标系下的数据。
捷联惯导系统中,惯性测量单元刚性的安装在设备上,没有稳定平台之说了,因此惯性测量单元的测量数据都是在body frame或者说局部坐标系而不是在全局坐标系下。此时,设备的方向信息不能直接从陀螺仪来读了,而需要整合之前的方向信息。同样设备的位置信息也要将加速度数据通过整合后的方向信息转换到全局坐标系下再积分获得。
两个系统的算法如下图所示:
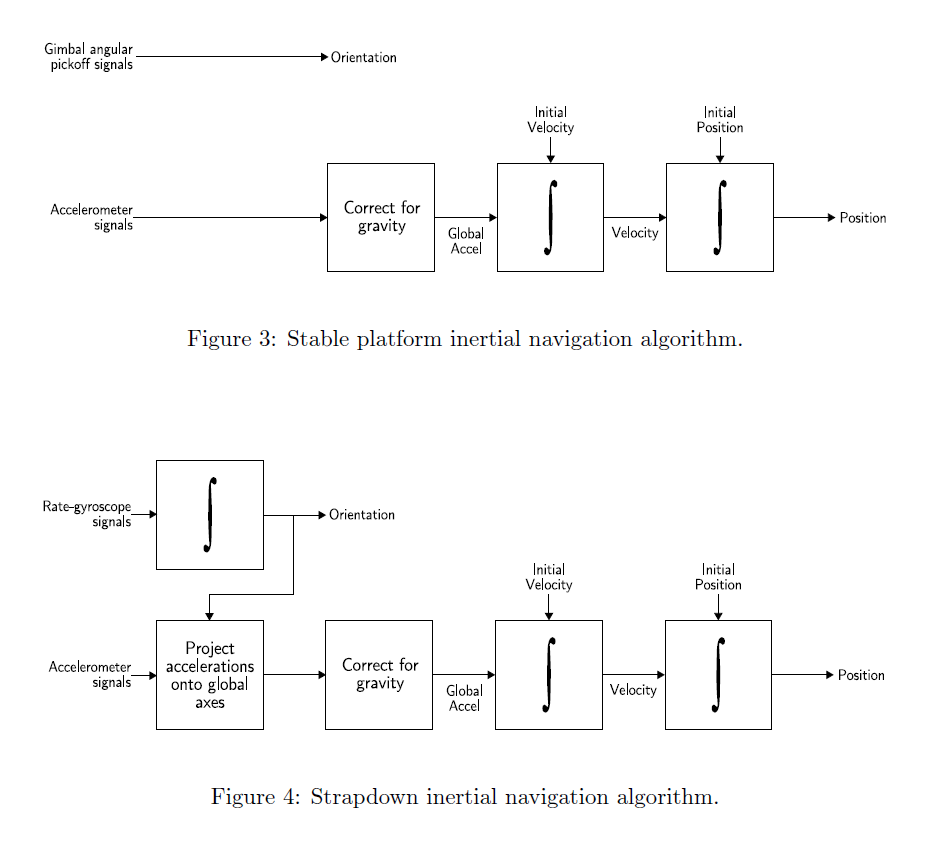
平台惯导系统的结构比较复杂,体积大,但计算简单,捷联系统简化了机械结构的复杂性,但是增加了计算复杂度,随着计算成本的降低,捷联系统越来越占据着主导地位。
本文参考《An introduction to inertial navigation》Oliver J. Woodman
在稳定平台惯导系统中,稳定平台的轴坐标系是和global frame即全局坐标系统是一致的,而惯性测量单元就是安装在稳定平台上,陀螺仪可以检测到平台的旋转,然后这些旋转信号反馈到系统的转矩电机,转矩电机会旋转系统的平衡环以抵消掉这些的旋转,使得稳定平台和全局坐标系一致。
在稳定平台系统中,设备的方向信息可以直接从系统中读取,设备位置的计算需要对平台上的加速度计通过二次积分获得(注意,积分前需要从垂直方向上减掉重力加速度)。可以认为惯性测量的数据都是全局坐标系下的数据。
捷联惯导系统中,惯性测量单元刚性的安装在设备上,没有稳定平台之说了,因此惯性测量单元的测量数据都是在body frame或者说局部坐标系而不是在全局坐标系下。此时,设备的方向信息不能直接从陀螺仪来读了,而需要整合之前的方向信息。同样设备的位置信息也要将加速度数据通过整合后的方向信息转换到全局坐标系下再积分获得。
两个系统的算法如下图所示:
平台惯导系统的结构比较复杂,体积大,但计算简单,捷联系统简化了机械结构的复杂性,但是增加了计算复杂度,随着计算成本的降低,捷联系统越来越占据着主导地位。
本文参考《An introduction to inertial navigation》Oliver J. Woodman

相关文章推荐
- 微软系统平台上----TOMCAT性能调优后可以稳定支持的最大并发用户数量在300人
- hdu 1914 The Stable Marriage Problem(稳定婚配系统)
- Android平台上如何让应用程序获得系统权限以及如何使用platform密钥给apk签名
- Android平台上如何让应用程序获得系统权限以及如何使用platform密钥给apk签名
- 基于structs2的用户登录控制(filter)和基于spring mvc的用户登录控制的对比(基于“XX公共平台”ksplatform和XX社区系统myAcl1)
- Android平台上如何让应用程序获得系统权限以及如何使用platform密钥给apk签名
- Android平台上如何让应用程序获得系统权限以及如何使用platform密钥给apk签名
- b/s系统平台调用龙脉加密锁遇到问题
- 工作流审批平台-系统概述-关联企业应用系统
- 中国光大银行同城灾备系统切换管理平台项目(一期)招标公告
- 网校系统如何对接第三方平台-以因酷时代为例
- gbk/utf8/unicode编码转换,不依赖任何系统API自己实现与平台无关的转换算法
- 游戏平台网站系统架构 账号篇
- 钻井平台移动信号放大系统设计方案
- 判断IE版本、系统版本、系统平台
- 推荐系统:Evaluating_collaborative_filtering_recommender_systems
- 用新浪SAE云平台打造纸白银价格预警系统
- 聚聚呀平台系统结构图
- 如何正确选择需要的多商家入驻电商平台的开发公司和软件系统
- 直播系统解决方案:直播平台如何开发搭建