nanopi 2s及tiny6410的开机自动加载驱动方法
2018-02-25 09:38
274 查看
在网上搜了许多,但都不得力,最后通过修改nanopi 2s 的 /etc/rc.local以及tiny6410的/etc/init.d/rcS文件即可
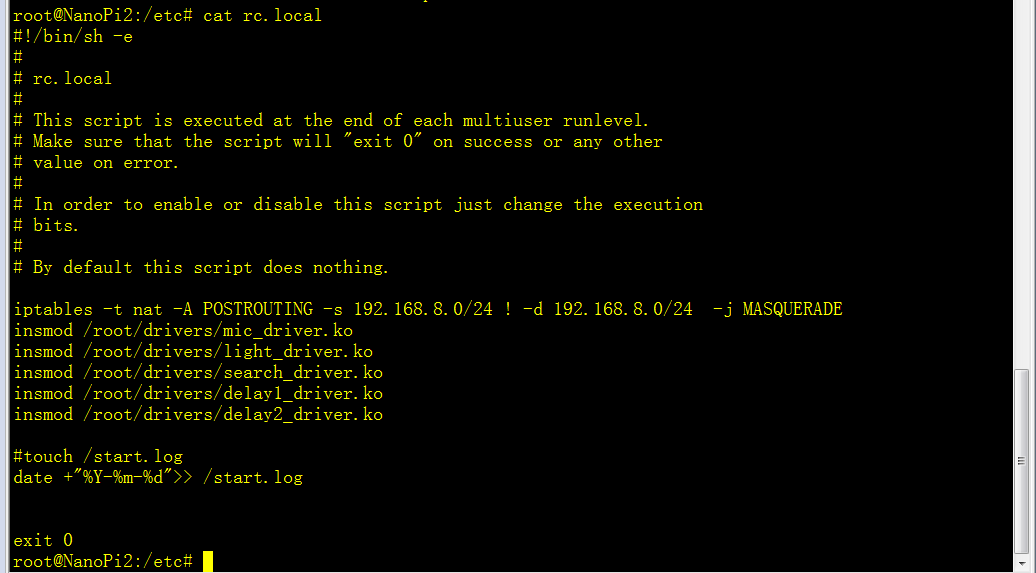
就在其最后添加insmod /root/drivers/mic_driver.ko (即命令加具体的驱动路径就OK了)。
nanopi 2s的修改如下:
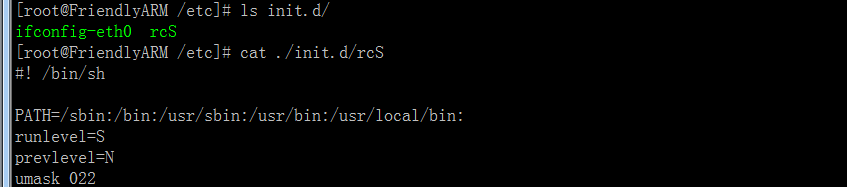
tiny6410 的修改如下:
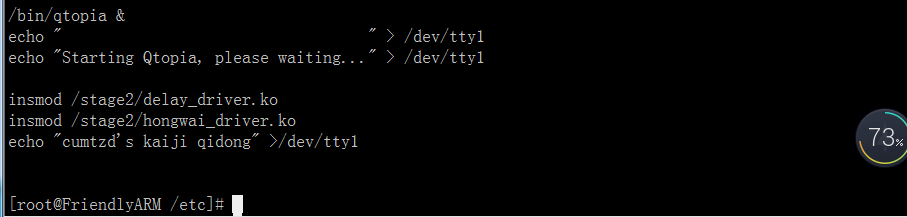
修改好后,直接reboot就ok了。
总结实践,可得如下心得:
1.nanopi2s 中的rc0-6.d、rc.local对应的是不同的系统运行级别,可以通过 runlevel命令查询,修改对应的文件即可获得相应的开机运行命令,但rc.local是各个级别的系统启动后都要运行的,故可以直接修改rc.local即可获得开机启动效果。
2.tiny6410中就只有个/etc/init.d/rcS,暂时没搞清它对应那个级别,但修改了就能运行。
3.加载驱动也可以通过modprobe命令,这个命令更高级,可以判别驱动间的联系
使用方法:(1)将驱动ko文件放到/lib/module/#uname -r#/目录下,#uname -r#对应内核版本
(2)执行depmod命令
(3)modprobe mic_driver(ok了,注意不要再加.ko后缀),搞定
另附网友的另一办法,其中对modprobe说的比较清楚:
假设你的设备驱动程序为:yourdrivername.ko
1 cp yourdrivername.ko /lib/modules/"version"/kernel/drivers/misc
其中,version为linux的版本,默认为:2.6.23.1-42.fc8
2 编辑/lib/modules/"version"/modules.dep,设置驱动程序之间的关联,增加一行:
/lib/modules/"version"/kernel/drivers/misc/yourdrivername.ko:
如果有关联,在:后面标注关联的驱动程序名称
3 编辑/etc/rc.d/rc.local,增加一行
/sbin/modprobe yourdrivername
.模块加载的两种方式
1)、动态加载
动态加载是将驱动模块加载到内核中,而不能放入/lib/modules/下。
在2.4内核中,加载驱动命令为:insmod ,删除模块为:rmmod;
在2.6以上内核中,除了insmod和rmmod外,加载命令更有modprobe;
insmod和modprobe不同之处:
insmod 绝对路径/××.o,而modprobe ××即可,不用加.ko或.o后缀,也不用加路径;最重要的一点是:modprobe同时会加载当前模块所依赖的其他模块;
lsmod查看当前加载到内核中的所有驱动模块,同时提供其他一些信息,比如其他模块是否在使用另一个模块。
2)、静态加载
(一)概念
在执行make menuconfig命令进行内核设置裁剪时,在窗口中能选择是否编译入内核,还是放入/lib/modules/下相应内核版本目录中,还是不选。
(二)操作步骤
linux设备一般分为:字符设备、块设备和网络设备,每种设备在内核原始码目录树drivers/下都有对应的目录,其加载方法类似,以下以字符设备静态加载为例,假设驱动程式原始码名为ledc.c,具体操作步骤如下:
第一步:将ledc.c源程式放入内核源码drivers/char/下;
第二步:修
4000
改drivers/char/Config.in文件,具体修改如下:
按照打开文件中的格式添加即可;
就在其最后添加insmod /root/drivers/mic_driver.ko (即命令加具体的驱动路径就OK了)。
nanopi 2s的修改如下:
tiny6410 的修改如下:
修改好后,直接reboot就ok了。
总结实践,可得如下心得:
1.nanopi2s 中的rc0-6.d、rc.local对应的是不同的系统运行级别,可以通过 runlevel命令查询,修改对应的文件即可获得相应的开机运行命令,但rc.local是各个级别的系统启动后都要运行的,故可以直接修改rc.local即可获得开机启动效果。
2.tiny6410中就只有个/etc/init.d/rcS,暂时没搞清它对应那个级别,但修改了就能运行。
3.加载驱动也可以通过modprobe命令,这个命令更高级,可以判别驱动间的联系
使用方法:(1)将驱动ko文件放到/lib/module/#uname -r#/目录下,#uname -r#对应内核版本
(2)执行depmod命令
(3)modprobe mic_driver(ok了,注意不要再加.ko后缀),搞定
另附网友的另一办法,其中对modprobe说的比较清楚:
假设你的设备驱动程序为:yourdrivername.ko
1 cp yourdrivername.ko /lib/modules/"version"/kernel/drivers/misc
其中,version为linux的版本,默认为:2.6.23.1-42.fc8
2 编辑/lib/modules/"version"/modules.dep,设置驱动程序之间的关联,增加一行:
/lib/modules/"version"/kernel/drivers/misc/yourdrivername.ko:
如果有关联,在:后面标注关联的驱动程序名称
3 编辑/etc/rc.d/rc.local,增加一行
/sbin/modprobe yourdrivername
.模块加载的两种方式
1)、动态加载
动态加载是将驱动模块加载到内核中,而不能放入/lib/modules/下。
在2.4内核中,加载驱动命令为:insmod ,删除模块为:rmmod;
在2.6以上内核中,除了insmod和rmmod外,加载命令更有modprobe;
insmod和modprobe不同之处:
insmod 绝对路径/××.o,而modprobe ××即可,不用加.ko或.o后缀,也不用加路径;最重要的一点是:modprobe同时会加载当前模块所依赖的其他模块;
lsmod查看当前加载到内核中的所有驱动模块,同时提供其他一些信息,比如其他模块是否在使用另一个模块。
2)、静态加载
(一)概念
在执行make menuconfig命令进行内核设置裁剪时,在窗口中能选择是否编译入内核,还是放入/lib/modules/下相应内核版本目录中,还是不选。
(二)操作步骤
linux设备一般分为:字符设备、块设备和网络设备,每种设备在内核原始码目录树drivers/下都有对应的目录,其加载方法类似,以下以字符设备静态加载为例,假设驱动程式原始码名为ledc.c,具体操作步骤如下:
第一步:将ledc.c源程式放入内核源码drivers/char/下;
第二步:修
4000
改drivers/char/Config.in文件,具体修改如下:
按照打开文件中的格式添加即可;

相关文章推荐
- Linux开机不能自动加载 ~/.bash_profile 文件的解决方法
- tiny6410 驱动模块开机自动加载
- Linux系统开机自动加载驱动module
- insmod加载驱动后开机重启后没有驱动的解决方法
- PHP动态地创建属性和方法, 对象的复制, 对象的比较,加载指定的文件,自动加载类文件,命名空间
- 在linux下设置开机自动启动程序的方法
- 用js实现在加载完成一个页面后自动执行一个方法
- c++ 让程序开机自动启动的方法
- C118 免按开机自动加载固件
- 初始加载时edittext不自动获取焦点的方法
- ubuntu(mate) 开机自动登陆到桌面方法 树莓派3装ubuntu mate 开机自动登陆到桌面
- ubuntu开机自动启动xampp/lampp的两种方法
- Windows 7 开机自动拨号 常用的五种方法
- 一种加载驱动的方法
- 在linux下设置开机自动启动程序的方法
- 页面自动执行(加载)js的几种方法
- jquery 瀑布流自动加载数据方法
- 注册表编辑器里面的run(Run键主要用于开机自动加载程)
- 利用jQuery load 方法加载HTML公共页面,导航菜单自动选中
- linux下设置开机自动启动程序的方法