halcon由标定板得到测量平面位姿
2018-02-15 23:53
183 查看
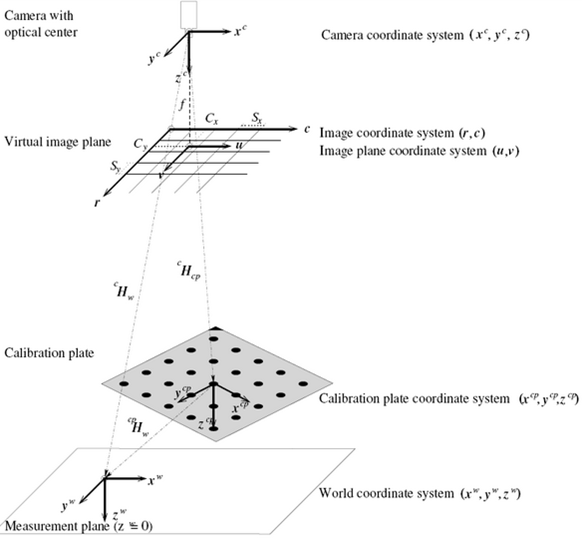
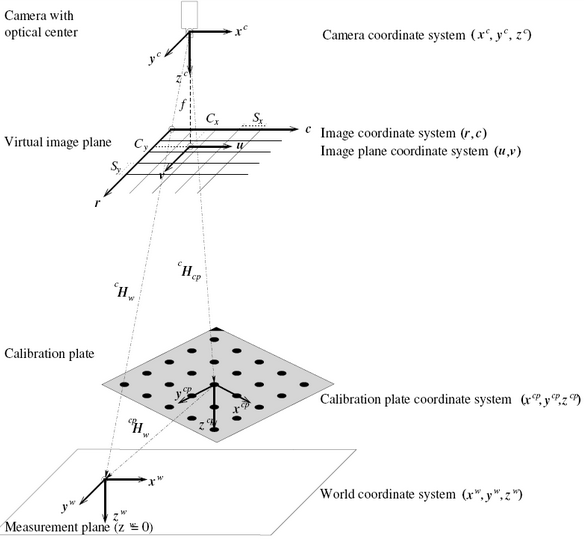
如图:由标定板位姿获取测量板位姿
1.pose_to_hom_mat3d( : : Pose : HomMat3D)把三维位姿转化为齐次变换矩阵2.hom_mat3d_translate_local( : : HomMat3D, Tx, Ty, Tz : HomMat3DTranslate)相对于新坐标系的平移变换/ 1 0 0 \ / Tx \HomMat3DTranslate = HomMat3D * | 0 1 0 t | t = | Ty |
1.pose_to_hom_mat3d( : : Pose : HomMat3D)把三维位姿转化为齐次变换矩阵2.hom_mat3d_translate_local( : : HomMat3D, Tx, Ty, Tz : HomMat3DTranslate)相对于新坐标系的平移变换/ 1 0 0 \ / Tx \HomMat3DTranslate = HomMat3D * | 0 1 0 t | t = | Ty |
| 0 0 1 | \ Tz /
\ 0 0 0 1 / 返回值为HomMat3DTranslate矩阵。3.hom_mat3d_rotate_local( : :HomMat3D, Phi, Axis : HomMat3DRotate)
相对于新坐标系的旋转变换,输出为原 HomMat3D右乘旋转矩阵后的齐次变换矩阵。4.hom_mat3d_to_pose( : : HomMat3D : Pose)把齐次矩阵转化为3D位姿态。利用0类代码,即先平移顺序RPT,旋转gba,以点的形式表达位姿。

相关文章推荐
- halcon学习笔记——(8)由标定板得到测量平面位姿
- halcon学习笔记——(8)由标定板得到测量平面位姿
- halcon学习笔记——(8)由标定板得到测量平面位姿
- halcon学习笔记——(8)由标定板得到测量平面位姿
- halcon学习笔记——(8)由标定板得到测量平面位姿
- Halcon:一维测量
- halcon 特征测量
- halcon二维测量
- halcon制作标定板
- HALCON标定板简介
- 基于Android用数值迭代法得到条形平面腔的自再现模
- Halcon算子--图像、区域、轮廓、测量、拟合、垂足、夹角
- Halcon如何制作标定板
- Halcon标定板规格
- Halcon标定板材质介绍
- halcon标定板制作
- Halcon 1D测量(2) :测量特定灰度值像素
- 【Halcon】1D测量之二三
- halcon标定板说明