zynq+linux+ramdisk can调试
2018-02-13 11:35
316 查看
由于采用ramdisk文件系统,自带的ip工具版本太旧无法配置can,需要自行编译ip,具体参见参考文献2
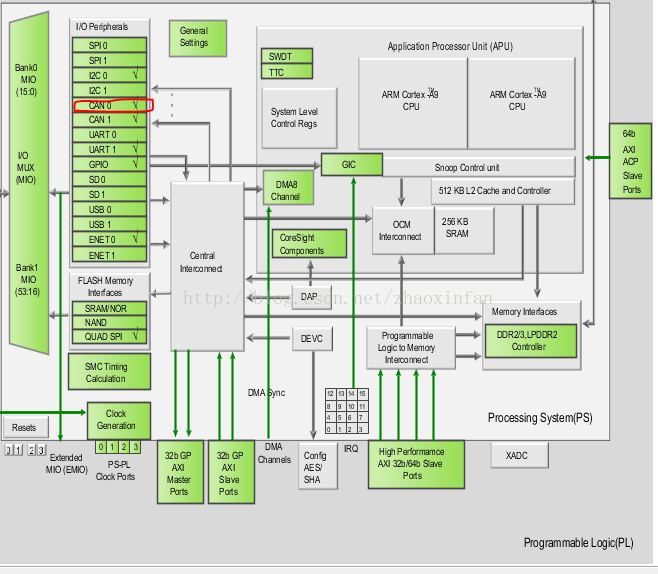
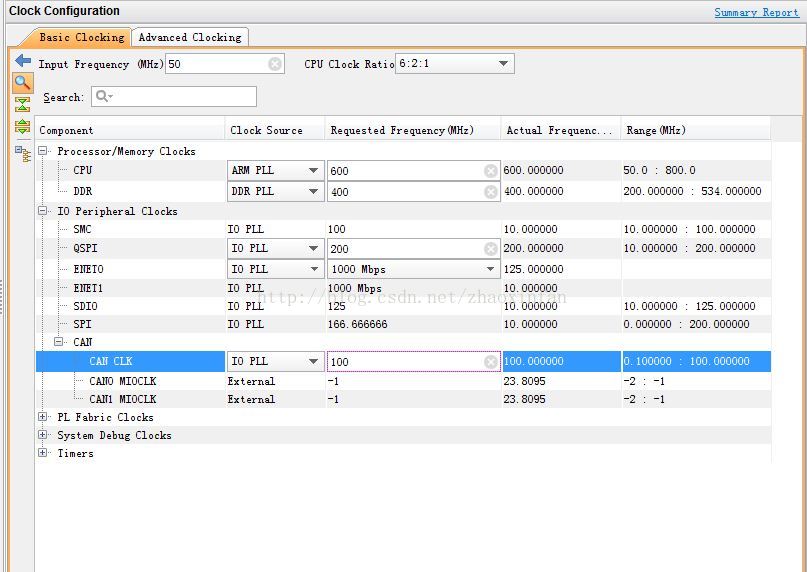
1.vivado配置ps
2.设备树增加can0,一般开发板均已提供此配置
3.kernel配置,一般已配好,具体参见参考文献1
4.测试
设置can0的波特率,这里设置的是100k, ip程序一般需要自己编译生成,参见2
#./ip link set can0 up type can bitrate 100000
显示can0状态信息
#./ip -d -s link show can0
5.下面程序为收发测试,也可参见参考文献3
参考文献:
1.http://xilinx.eetrend.com/blog/12062
2.http://www.cnblogs.com/hujianhua/p/8446291.html
3.https://wenku.baidu.com/view/65baea51bb68a98271fefaa7.html
1.vivado配置ps
2.设备树增加can0,一般开发板均已提供此配置
can@e0008000 {
compatible = "xlnx,zynq-can-1.0";
status = "okay";
clocks = <0x1 0x13 0x1 0x24>;
clock-names = "can_clk", "pclk";
reg = <0xe0008000 0x1000>;
interrupts = <0x0 0x1c 0x4>;
interrupt-parent = <0x3>;
tx-fifo-depth = <0x40>;
rx-fifo-depth = <0x40>;
};3.kernel配置,一般已配好,具体参见参考文献1
4.测试
# ifconfig -a can0 Link encap:UNSPEC HWaddr 00-00-00-00-00-00-00-00-00-00-00-00-00-00-00-00 NOARP MTU:16 Metric:1 RX packets:0 errors:0 dropped:0 overruns:0 frame:0 TX packets:0 errors:0 dropped:0 overruns:0 carrier:0 collisions:0 txqueuelen:10 RX bytes:0 (0.0 B) TX bytes:0 (0.0 B) Interrupt:22 eth0 Link encap:Ethernet HWaddr 00:0A:35:00:01:22 inet addr:192.168.0.120 Bcast:192.168.0.255 Mask:255.255.255.0 UP BROADCAST RUNNING MULTICAST MTU:1500 Metric:1 RX packets:397 errors:0 dropped:0 overruns:0 frame:0 TX packets:242 errors:0 dropped:0 overruns:0 carrier:0 collisions:0 txqueuelen:1000 RX bytes:476490 (465.3 KiB) TX bytes:18536 (18.1 KiB) Interrupt:148 Base address:0xb000 lo Link encap:Local Loopback LOOPBACK MTU:65536 Metric:1 RX packets:0 errors:0 dropped:0 overruns:0 frame:0 TX packets:0 errors:0 dropped:0 overruns:0 carrier:0 collisions:0 txqueuelen:0 RX bytes:0 (0.0 B) TX bytes:0 (0.0 B)
设置can0的波特率,这里设置的是100k, ip程序一般需要自己编译生成,参见2
#./ip link set can0 up type can bitrate 100000
显示can0状态信息
#./ip -d -s link show can0
Z-turn# ./ip link set can0 type can bitrate 100000 xilinx_can e0008000.can can0: bitrate error 0.0% Z-turn#./ip link set can0 up Z-turn#./ip -d -s link show can0 2: can0: <NOARP,UP,LOWER_UP,ECHO> mtu 16 qdisc pfifo_fast state UNKNOWN mode DEFAULT group default qlen 10 link/can promiscuity 0 can state ERROR-ACTIVE (berr-counter tx 0 rx 0) restart-ms 0 bitrate 99999 sample-point 0.750 tq 2500 prop-seg 1 phase-seg1 1 phase-seg2 1 sjw 1 xilinx_can: tseg1 1..16 tseg2 1..8 sjw 1..4 brp 1..256 brp-inc 1 clock 99999999 re-started bus-errors arbit-lost error-warn error-pass bus-off 0 0 0 0 0 0 numtxqueues 1 numrxqueues 1 RX: bytes packets errors dropped overrun mcast 0 0 0 0 0 0 TX: bytes packets errors dropped carrier collsns 0 0 0 0 0 0
5.下面程序为收发测试,也可参见参考文献3
/*****************************************************************************
* Copyright (c) 2014-2017 MYIR Tech Ltd.
* File: can-test.c
* Date: 2014/11/3
* Author: Kevin Su
* Description: A demo program to show how to transmit/receive data with
* socket can interface on CAN bus.
* Please note that, this demo needs two boards to run as
* transmitter and receiver.
* Before run "can-test", we need to config the bitrate with
* "ip" command:
* # ip link set can0 up type can bitrate 100000
*/
#include <stdio.h>
#include <string.h>
#include <stdlib.h>
#include <unistd.h>
#include <fcntl.h>
#include <sys/ioctl.h>
#include <net/if.h>
#include <linux/can.h>
#include <linux/can/raw.h>
#define DEBUG 1
#define ERR_MSG(fmt, args...) fprintf(stderr, fmt, ##args)
#ifdef DEBUG
#define DBG_MSG(fmt, args...) fprintf(stdout, fmt, ##args)
#else
#define DBG_MSG(fmt, args...)
#endif
#ifndef PF_CAN
#define PF_CAN 29
#endif
#ifndef AF_CAN
#define AF_CAN PF_CAN
#endif
int main(int argc, char *argv[])
{
int fd, ret, flag, len;
char senddata[32] = "test";
struct sockaddr_can addr;
struct ifreq ifr;
struct can_frame frame;
socklen_t socket_len = sizeof(struct sockaddr_can);
/* Create a socket with PF_CAN family, SOCK_RAW and CAN_RAW protocol */
fd = socket(PF_CAN, SOCK_RAW, CAN_RAW);
if (fd < 0) {
ERR_MSG("Open socket failed!\n");
return fd;
}
/* Use can0 */
strcpy((char *)(ifr.ifr_name), "can0");
/* Get information */
ret = ioctl(fd, SIOCGIFINDEX, &ifr);
if (ret != 0) {
ERR_MSG("SIOCGIFINDEX failed! ret:%d\n", ret);
close(fd);
return ret;
}
DBG_MSG("can0 can_ifindex = %x\n",ifr.ifr_ifindex);
/* Disable loopback */
flag = 0;
ret = setsockopt(fd, SOL_CAN_RAW, CAN_RAW_LOOPBACK, &flag, sizeof(flag));
if (ret != 0) {
ERR_MSG("Set loopback disable failed! ret:%d\n", ret);
close(fd);
return ret;
}
DBG_MSG("Set can0 loopback disable\n");
/* Disable receiving own message */
flag = 0;
ret = setsockopt(fd, SOL_CAN_RAW, CAN_RAW_RECV_OWN_MSGS,
&flag, sizeof(flag));
if (ret != 0) {
ERR_MSG("Disable receiving own message failed! ret:%d\n", ret);
close(fd);
return ret;
}
DBG_MSG("Disable receiving own message\n");
/* Use AF_CAN protocol family */
addr.can_family = AF_CAN;
addr.can_ifindex = ifr.ifr_ifindex;
/* Binding socket */
ret = bind(fd, (struct sockaddr*)&addr, sizeof(addr));
if (ret != 0) {
ERR_MSG("Bind socket failed! ret:%d\n", ret);
close(fd);
return ret;
}
DBG_MSG("Bind can0 socket\n");
frame.can_id = 0x123;
len = strlen(senddata);
while (1) {
strncpy((char *)frame.data, senddata, len);
frame.can_dlc = len;
ret = sendto(fd, &frame, sizeof(struct can_frame), 0, (struct sockaddr*)&addr, sizeof(addr));
if (ret > 0) {
DBG_MSG("Send success: [%s], ret=%d\n", senddata, ret);
ret = recvfrom(fd, &frame, sizeof(struct can_frame), 0, (struct sockaddr *)&addr, &socket_len);
if (ret > 0) {
DBG_MSG("Recv message: [%s], ret=%d\n", frame.data, ret);
}
}
usleep(500000);
}
return 0;
}参考文献:
1.http://xilinx.eetrend.com/blog/12062
2.http://www.cnblogs.com/hujianhua/p/8446291.html
3.https://wenku.baidu.com/view/65baea51bb68a98271fefaa7.html

相关文章推荐
- linux(ubuntu)系统下can调试工具canutils和iproute的编译应用
- Zynq-Linux移植学习笔记之三-ramdisk
- Linux Canbus调试笔记
- 在Zynq 7000平台上使用Linux spidev.c驱动,调试spi设备
- 【ZYNQ_LINUX】遇到的问题06: unzip arm_ramdisk.image.gz 出错
- Linux下gdb 调试应用程序与动态库
- 在Linux下产生并调试core文件
- Zynq-Linux移植学习笔记之12-gpio驱动配置
- Linux下调试段错误的方法[Segmentation Fault]--GDB
- linux-2.6.26下SPI(1)驱动移植调试
- virtualbox(linux host) 调试linux guest 内核
- 使用 KGDB 调试 Linux 内核
- Linux下用gdb调试多进程与多线程程序
- Linux如何通过连接RS232转串口设备:USB-CAN或雷达
- 嵌入式Linux工控主板调试串口转换为应用串口的方法
- 教你轻松入门Linux下用gdb调试
- linux下的gdb调试工具--内存调试
- arm-linux-gdb在调试core dump文件的用法
- [Linux驱动开发] ramdisk文件系统制作及移植
- Linux环境下段错误的产生原因及调试方法小结