【ROS学习笔记】移动机器人的分层控制
2018-01-24 15:42
344 查看
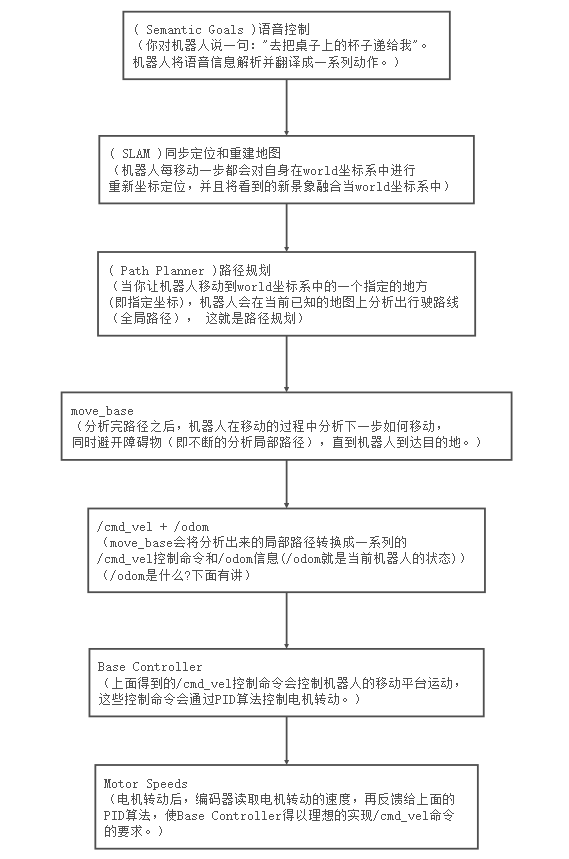
ROS控制一个移动机器人的阶层如下(从最上层开始):
节选自:http://blog.csdn.net/github_35160620/article/details/52514090
节选自:http://blog.csdn.net/github_35160620/article/details/52514090

相关文章推荐
- ROS + Caffe 机器人操作系统框架和深度学习框架笔记 (機器人控制與人工智能)
- ROS + Caffe 机器人操作系统框架和深度学习框架笔记 (機器人控制與人工智能)
- ROS学习笔记(八)
- 【Unity 3D】学习笔记四十六:输入与控制——键盘事件
- 学习ROS笔记之TF——learning tf(一)
- TCP/IP分层模型学习笔记
- Scala学习教程笔记一之基础语法,条件控制,循环控制,函数,数组,集合
- angular学习笔记(八)-控制视图显示隐藏
- UNIX环境编程学习笔记(18)——进程管理之进程控制三部曲
- Java学习笔记(四)循环控制
- ROS学习笔记四:理解ROS节点
- Ubuntu14.04_ROS学习笔记(1)ROS配置
- PHP学习笔记——特殊的流程控制语句
- Oracle 学习笔记 13 -- 控制用户权限
- [黑马程序员]09[C语言]循环控制语句部分学习笔记总结
- 【C#学习笔记】鼠标控制
- ROS学习笔记(四):ROS 的一些常用命令行功能
- [ASP.NET学习笔记之十]ASP.NET实现在服务器端控制网页
- ROS学习笔记2 消息发布与订阅
- ROS学习笔记(一)