车载网络: CAN (Control Area Network) 控制器局域网络
2018-01-02 17:14
267 查看
概述
CAN,全称 控制器局域网络 (Controller Area Network, CAN),是由以研发和生产汽车电子产品著称的德国BOSCH公司开发的,并最终成为 国际标准(ISO 11898),是国际上应用最广泛的现场总线之一。CAN工作方式
通过一种类似于“会议”的机制实现通信。每一个会议参与人员都可以自由地提出会议议题(多主通信模式) [1]。诞生
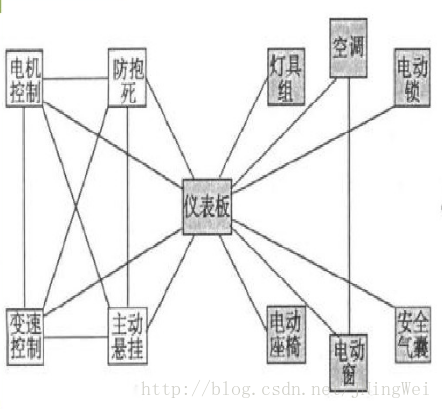
为了解决现代汽车中众多控制器及测试仪器之间的数据交换、实现数据共享并尽量避免过多占用邮箱的车辆空间,在车辆电控系统中引入了CAN总线技术 [1]。汽车传统布线网络图 [2]:
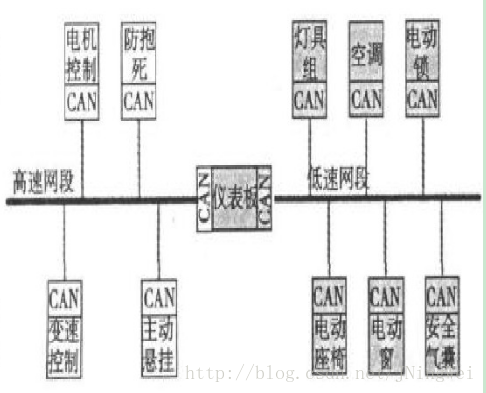
汽车CAN总线布线网络图 [2]:
分层结构
CAN协议包括ISO/OSI参考模型中的最低两层 [1]:数据链路层
物理层
优缺点
优点
CAN总线的节点分成不同的优先级;采用非破坏仲裁技术;
报文采用短帧结构,数据出错率极低;
节点在错误严重的情况下可自动关闭输出 [3]。
缺点
CAN现场总线作为一种面向工业底层控制的通信网络,其局限性也是显而易见的 [3]:不能与Internet互连,不能实现远程信息共享;
不易与上位控制机直接接口;
现有的CAN接口卡与以太网网卡相比大都价格昂贵;
CAN现场总线无论是其通信距离还是通信速率都无法和以太网相比。
成为车载网络协议主流
CAN为多主方式工作,所以与一般的通信总线相比,CAN总线的数据通信具有突出的可靠性、实时性和灵活性 [4]。因而成为车载网络协议的主流。仿真软件
CANOE [5]PFautoCAN [5]
Simulink
Ref
[1] 百度文库:车载网络技术(精简版)[2] 百度文库:车载网络技术
[3] 面包板:TCP/IP总线与CAN总线优缺点对比
[4] 百度知道:CAN总线和PROFIBUS总线的优缺点
[5] 百度百科:车载网络

相关文章推荐
- ubuntu 休眠之后网络间接失败 can not connect to network after suspend (wake up)
- 4. 控制器区域网络(CAN)
- CAN (Controller Area Network) BUS
- HIN 异构信息网络(Heterogeneous Information Network)
- iso15675 道路车辆控制局域网络诊断 第二部分 网络层服务 阅读笔记 (1)
- htons函数详解:网络与主机字节转换函数:(s 就是short l是long h是host n是network)
- ArcGIS Server + SilverLight + NetWorkAnalyst 网络分析错误:routing error:error solving route,unable to find attribute invalid!
- 几种UDP网络库的整理 Raknet,UDT,ENet,lidgren-network-gen3
- #231 – 使用渐变色作为前景色(You Can Use a Brush for a Control’s Foreground)
- 【BZOJ】1146: [CTSC2008]网络管理Network(树链剖分+线段树套平衡树+二分 / dfs序+树状数组+主席树)
- func统一网络控制器安装配置
- Enhancing network controls in mandatory access control computing environments
- AjaxControlToolkit安装指南(转自于网络)
- 【BZOJ】1834: [ZJOI2010]network 网络扩容(最大流+费用流)
- 【BZOJ 1146】[CTSC2008]网络管理Network
- Bzoj:[ZJOI2010]network 网络扩容:网络流,最大流+费用流
- NetWork——描述一次完整的网络请求过程
- 【BZOJ1146】[CTSC2008]网络管理Network 树状数组+DFS序+主席树
- 【BZOJ 1146】【CTSC 2008】网络管理network