STM32 CAN总线调试的一点心得总结
2017-12-18 16:34
267 查看
一. 开发平台与工具:1. 平台: STM32F103C8T6 48PIN工控板和自己设计的STM32开发板2. 软件: MDK5 UVision V5.14.0.03. PACK: STM32F1xx_DFP——1.0.5(2014-03-14)4. 其它:USB转串口,ST-Link下载器,USB-CAN Adapter(比较便宜的购买链接https://item.taobao.com/item.htm?spm=a1z09.2.0.0.549a3c95khWWbw&id=557749735449&_u=du6q5o455a0)用于直接监视CAN口发出的数据,上位机有两个,一个是EmbededConfig for USB2CAN 配置串口、串口波特率、CAN速率等,另一个是EmbededDebug V2.0监视CAN口数据;使用顺序是先配置后查看CAN数据。二. CAN总线的介绍简略:bxCAN 是基本扩展 CAN (Basic Extended CAN) 的缩写,它支持 CAN 协议 2.0A 和 2.0B 。它的设计目标是,以最小的 CPU 负荷来高效处理大量收到的报文。它也支持报文发送的优先级要求(优先级特性可软件配置)。对于安全紧要的应用,bxCAN 提供所有支持时间触发通信模式所需的硬件功能。主要特点· 支持 CAN 协议 2.0A 和 2.0B 主动模式· 波特率最高可达 1 兆位 / 秒· 支持时间触发通信功能发送· 3 个发送邮箱· 发送报文的优先级特性可软件配置· 记录发送 SOF 时刻的时间戳接收· 3 级深度的2个接收 FIFO· 14 个位宽可变的过滤器组 - 由整个 CAN 共享· 标识符列表· FIFO 溢出处理方式可配置· 记录接收 SOF 时刻的时间戳可支持时间触发通信模式· 禁止自动重传模式· 16 位自由运行定时器· 定时器分辨率可配置· 可在最后 2 个数据字节发送时间戳管理· 中断可屏蔽· 邮箱占用单独 1 块地址空间,便于提高软件效率更多STM32 CAN总线介绍详见:STM32中文参考手册_V10.pdf 或 STM32F10XXX-RM0008 Reference Manual 英文版三. 遇到的问题分析与解决:手上有两块STM32的板子,一个是网上买的MINI STM32工控板,另一个是自己公司设计的板子。二者有所不同,大致有两点,第一是串口,工控板用的是USART1 且用的是GPIO PA9(TX)和PA10(RX),自设板用的是USART2 且用的是GPIO PA2(TX)和PA3(RX);第二是CAN口管脚不同,工控板用的是复用功能映射到PB8(RX)和PB9(TX),而自设板用的是PA11(RX)和PA12(TX)。下图所示,两块板子部分原理图:工控板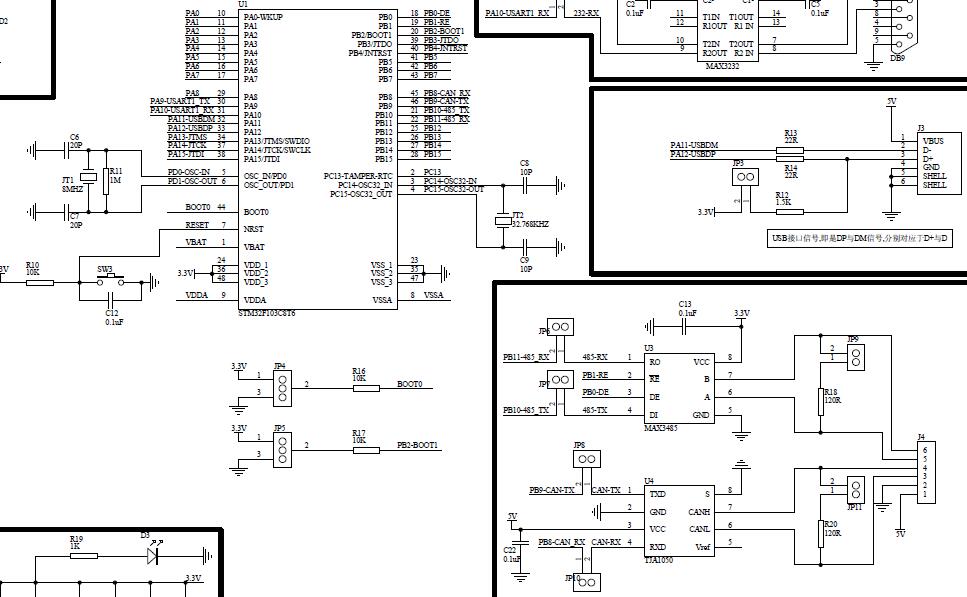 自设板
自设板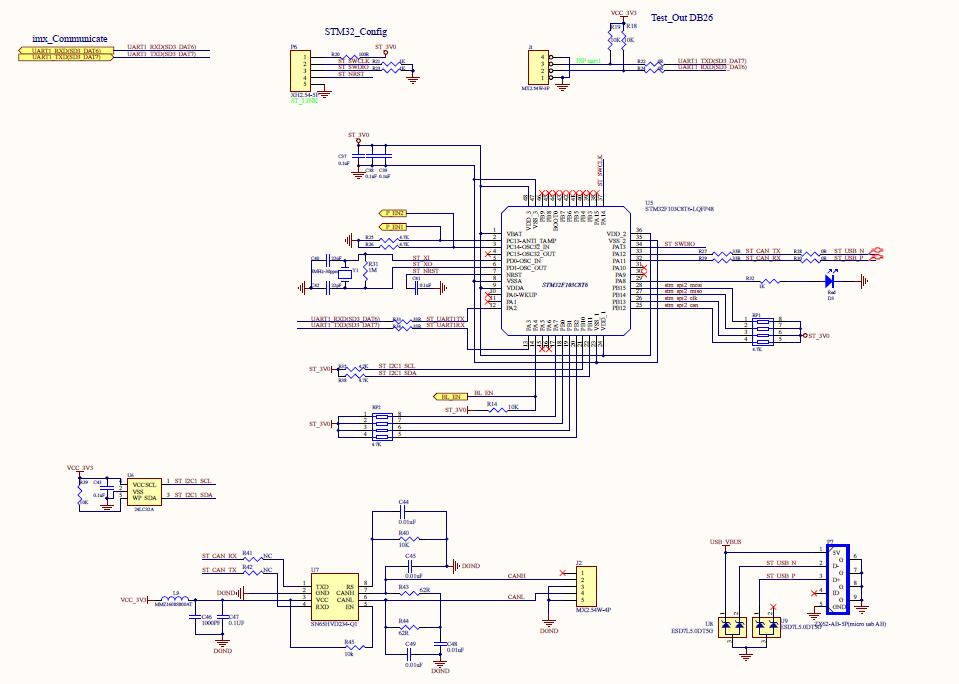 现在我是在工控板测试代码基础上,用到自设板上,实现PC端串口与STM32 CAN双向通信,要做的是将USART和CAN口的GPIO配置对应到自设板上。首先,串口GPIO配置:工控板
现在我是在工控板测试代码基础上,用到自设板上,实现PC端串口与STM32 CAN双向通信,要做的是将USART和CAN口的GPIO配置对应到自设板上。首先,串口GPIO配置:工控板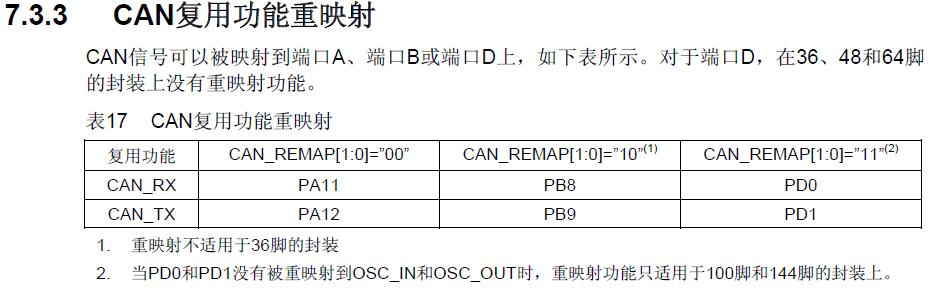 具体:-------------------------------------------------------------------------默认模式 /* Configure CAN pin: RX */ GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; GPIO_Init(GPIOA, &GPIO_InitStructure); /* Configure CAN pin: TX */ GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_Init(GPIOA, &GPIO_InitStructure);------------------------------------------------------------------------重定义地址1模式/* Configure CAN pin: RX */ //GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8; //GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //GPIO_Init(GPIOB, &GPIO_InitStructure); /* Configure CAN pin: TX */ //GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //GPIO_Init(GPIOB, &GPIO_InitStructure); /* Configure CAN Remap 重影射 */ //GPIO_PinRemapConfig(GPIO_Remap1_CAN, ENABLE);------------------------------------------------------------------------- 重定义地址2模式 /* Configure CAN pin: RX */ //GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //GPIO_Init(GPIOD, &GPIO_InitStructure); /* Configure CAN pin: TX */ //GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1; //GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //GPIO_Init(GPIOD, &GPIO_InitStructure); /* Configure CAN Remap 重影射 */ //GPIO_PinRemapConfig(GPIO_Remap2_CAN, ENABLE);-------------------------------------------------------------------------设置完 CAN 的引脚之后还需要打开 CAN 的时钟:/* CAN Periph clock enable */ RCC_APB1PeriphClockCmd(RCC_APB1Periph_CAN, ENABLE);上述摘自:http://blog.csdn.net/godvmxi/article/details/6773192第三CAN硬件部分:一开始对CAN硬件部分没有过多的了解,后面经过一系列的试验,发现:1. 如果STM32 CAN TX和RX没有和CAN收发器连接的情况下,STM32的CAN TX和RX是没用数据发出的;2. STM32 CAN TX和RX必须要与CAN收发器的TX和RX对应,即TX接TX,RX接RX,否则CAN没有数据发出,说明:之所以说这个问题,不知道你们有没有注意到,我的自设板CAN收发器TX和RX是反接的;3. STM32F103C8T6-LQFP48 的CAN口和USB口复用,即用CAN口是需要将USB口断开,防止有所影响;4. 是我本身设备问题,我的自设板用的12V电源是我自己焊接的,不太可靠,电源12V时有时无的,所以最好烧写程序的时候点亮一个LED灯,可以显示板子的工作状态;5. 工控板上CAN收发器是用TJA1050 是5V供电的,自设板用SN65HVD234 3.3-V CAN Bus Transceivers,之前有所顾虑,怕CAN收发器不一样会导致其它后果,之后发现没有问题。以上为本人的一点心得,走了很多弯路。。。记录点滴,以此自励。
具体:-------------------------------------------------------------------------默认模式 /* Configure CAN pin: RX */ GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; GPIO_Init(GPIOA, &GPIO_InitStructure); /* Configure CAN pin: TX */ GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_Init(GPIOA, &GPIO_InitStructure);------------------------------------------------------------------------重定义地址1模式/* Configure CAN pin: RX */ //GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8; //GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //GPIO_Init(GPIOB, &GPIO_InitStructure); /* Configure CAN pin: TX */ //GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //GPIO_Init(GPIOB, &GPIO_InitStructure); /* Configure CAN Remap 重影射 */ //GPIO_PinRemapConfig(GPIO_Remap1_CAN, ENABLE);------------------------------------------------------------------------- 重定义地址2模式 /* Configure CAN pin: RX */ //GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //GPIO_Init(GPIOD, &GPIO_InitStructure); /* Configure CAN pin: TX */ //GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1; //GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //GPIO_Init(GPIOD, &GPIO_InitStructure); /* Configure CAN Remap 重影射 */ //GPIO_PinRemapConfig(GPIO_Remap2_CAN, ENABLE);-------------------------------------------------------------------------设置完 CAN 的引脚之后还需要打开 CAN 的时钟:/* CAN Periph clock enable */ RCC_APB1PeriphClockCmd(RCC_APB1Periph_CAN, ENABLE);上述摘自:http://blog.csdn.net/godvmxi/article/details/6773192第三CAN硬件部分:一开始对CAN硬件部分没有过多的了解,后面经过一系列的试验,发现:1. 如果STM32 CAN TX和RX没有和CAN收发器连接的情况下,STM32的CAN TX和RX是没用数据发出的;2. STM32 CAN TX和RX必须要与CAN收发器的TX和RX对应,即TX接TX,RX接RX,否则CAN没有数据发出,说明:之所以说这个问题,不知道你们有没有注意到,我的自设板CAN收发器TX和RX是反接的;3. STM32F103C8T6-LQFP48 的CAN口和USB口复用,即用CAN口是需要将USB口断开,防止有所影响;4. 是我本身设备问题,我的自设板用的12V电源是我自己焊接的,不太可靠,电源12V时有时无的,所以最好烧写程序的时候点亮一个LED灯,可以显示板子的工作状态;5. 工控板上CAN收发器是用TJA1050 是5V供电的,自设板用SN65HVD234 3.3-V CAN Bus Transceivers,之前有所顾虑,怕CAN收发器不一样会导致其它后果,之后发现没有问题。以上为本人的一点心得,走了很多弯路。。。记录点滴,以此自励。
自设板现在我是在工控板测试代码基础上,用到自设板上,实现PC端串口与STM32 CAN双向通信,要做的是将USART和CAN口的GPIO配置对应到自设板上。首先,串口GPIO配置:工控板void USART1_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
/* config USART1 clock */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA, ENABLE);
/* USART1 GPIO config */
/* Configure USART1 Tx (PA.09) as alternate function push-pull */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* Configure USART1 Rx (PA.10) as input floating */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* USART1 mode config */
USART_InitStructure.USART_BaudRate = 115200;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No ;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART1, &USART_InitStructure);
USART_Cmd(USART1, ENABLE);
/* Enable the EVAL_COM1 Transmit interrupt: this interrupt is generated when the
EVAL_COM1 transmit data register is empty */
//USART_ITConfig(USART1, USART_IT_TXE, ENABLE);
/* Enable the EVAL_COM1 Receive interrupt: this interrupt is generated when the
EVAL_COM1 receive data register is not empty */
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
}
/***************USART1 ÅäÖÃÖжϷ½Ê½·¢ËͽÓÊÕÊý¾Ý******************************/
void USART1_NVIC_Configuration(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
/* Enable the USARTx Interrupt */
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
/****************USART1 ÖжϺ¯Êý***************************/
void USART1_IRQHandler(void)
{
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET)
{
RxBuffer[RxCounter++] = (USART_ReceiveData(USART1));
}
}USART1_Config()用于USART1的GPIO配置,配置到 * | PA9 - USART1(Tx) | * | PA10 - USART1(Rx) | * ------------------------USART1_NVIC_Configuration() 用于USART1设置中断方式接受发送数据USART1_IRQHandler()用于USART1中断接受函数自设板void USART2_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
/* config USART2 clock */
//RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2 , ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
/* USART2 GPIO config */
/* Configure USART2 Tx (PA.02) as alternate function push-pull */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* Configure USART2 Rx (PA.03) as input floating */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* USART2 mode config */
USART_InitStructure.USART_BaudRate = 115200;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No ;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART2, &USART_InitStructure);
USART_Cmd(USART2, ENABLE);
/* Enable the EVAL_COM1 Transmit interrupt: this interrupt is generated when the
EVAL_COM1 transmit data register is empty */
//USART_ITConfig(USART1, USART_IT_TXE, ENABLE);
/* Enable the EVAL_COM1 Receive interrupt: this interrupt is generated when the
EVAL_COM1 receive data register is not empty */
//USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
USART_ITConfig(USART2, USART_IT_RXNE, ENABLE);
}
/***************USART2 ÅäÖÃÖжϷ½Ê½·¢ËͽÓÊÕÊý¾Ý******************************/
void USART2_NVIC_Configuration(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
/* Enable the USARTx Interrupt */
NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
/****************USART2 ÖжϺ¯Êý***************************/
void USART2_IRQHandler(void)
{
if(USART_GetITStatus(USART2, USART_IT_RXNE) != RESET)
{
RxBuffer[RxCounter++] = (USART_ReceiveData(USART2));
}
}USART2_Config()用于USART2的GPIO配置,配置到 * | PA2 - USART2(Tx) | * | PA3 - USART2(Rx) | * ------------------------USART2_NVIC_Configuration() 用于USART2设置中断方式接受发送数据USART2_IRQHandler()用于USART2中断接受函数然后,配置CAN口GPIO工控板/*CAN GPIO ºÍʱÖÓÅäÖà */
void CAN_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
/* ¸´Óù¦ÄܺÍGPIOB¶Ë¿ÚʱÖÓʹÄÜ*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO | RCC_APB2Periph_GPIOB, ENABLE);
/* CAN1 Ä£¿éʱÖÓʹÄÜ */
RCC_APB1PeriphClockCmd(RCC_APB1Periph_CAN1, ENABLE);
/* Configure CAN pin: RX */ // PB8
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; // ÉÏÀÊäÈë
GPIO_Init(GPIOB, &GPIO_InitStructure);
/* Configure CAN pin: TX */ // PB9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; // ¸´ÓÃÍÆÍìÊä³ö
GPIO_Init(GPIOB, &GPIO_InitStructure);
//#define GPIO_Remap_CAN GPIO_Remap1_CAN1 ±¾ÊµÑéûÓÐÓõ½ÖØÓ³ÉäI/O
GPIO_PinRemapConfig(GPIO_Remap1_CAN1, ENABLE);
}自设板void CAN_GPIOA_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
/* CAN Periph clock enable */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA ,ENABLE);
// RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_CAN1, ENABLE);
/* Configure CAN pin: TX */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* Configure CAN pin: RX */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//GPIO_PinRemapConfig(GPIO_Remap1_CAN1 , ENABLE);
}/******************************************************************************************/就是这里!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!出现几个小问题,但是却是致命的问题!!!!!!!!!!!!!!!!!!!/******************************************************************************************/第一配置GPIO_Speed:GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //配置GPIO_Speed为50MHz如果配置GPIO时,省略这一步,会导致CAN口发送不出数据,工控板的配置是放在LED 的GPIO配置中,一开始忽略了这一点,之后用排除法试出来的;第二配置复用功能和映射与否:
// RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE); //复用功能时钟使能
//GPIO_PinRemapConfig(GPIO_Remap1_CAN1 , ENABLE); //重映射I/O CAN使能
上面两个被注释掉了,是由于:用PA11和PA12 用的是CAN的默认端口,而用PB8和PB9是用CAN的复用功能重映射端口。
具体:-------------------------------------------------------------------------默认模式 /* Configure CAN pin: RX */ GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; GPIO_Init(GPIOA, &GPIO_InitStructure); /* Configure CAN pin: TX */ GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_Init(GPIOA, &GPIO_InitStructure);------------------------------------------------------------------------重定义地址1模式/* Configure CAN pin: RX */ //GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8; //GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //GPIO_Init(GPIOB, &GPIO_InitStructure); /* Configure CAN pin: TX */ //GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //GPIO_Init(GPIOB, &GPIO_InitStructure); /* Configure CAN Remap 重影射 */ //GPIO_PinRemapConfig(GPIO_Remap1_CAN, ENABLE);------------------------------------------------------------------------- 重定义地址2模式 /* Configure CAN pin: RX */ //GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //GPIO_Init(GPIOD, &GPIO_InitStructure); /* Configure CAN pin: TX */ //GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1; //GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //GPIO_Init(GPIOD, &GPIO_InitStructure); /* Configure CAN Remap 重影射 */ //GPIO_PinRemapConfig(GPIO_Remap2_CAN, ENABLE);-------------------------------------------------------------------------设置完 CAN 的引脚之后还需要打开 CAN 的时钟:/* CAN Periph clock enable */ RCC_APB1PeriphClockCmd(RCC_APB1Periph_CAN, ENABLE);上述摘自:http://blog.csdn.net/godvmxi/article/details/6773192第三CAN硬件部分:一开始对CAN硬件部分没有过多的了解,后面经过一系列的试验,发现:1. 如果STM32 CAN TX和RX没有和CAN收发器连接的情况下,STM32的CAN TX和RX是没用数据发出的;2. STM32 CAN TX和RX必须要与CAN收发器的TX和RX对应,即TX接TX,RX接RX,否则CAN没有数据发出,说明:之所以说这个问题,不知道你们有没有注意到,我的自设板CAN收发器TX和RX是反接的;3. STM32F103C8T6-LQFP48 的CAN口和USB口复用,即用CAN口是需要将USB口断开,防止有所影响;4. 是我本身设备问题,我的自设板用的12V电源是我自己焊接的,不太可靠,电源12V时有时无的,所以最好烧写程序的时候点亮一个LED灯,可以显示板子的工作状态;5. 工控板上CAN收发器是用TJA1050 是5V供电的,自设板用SN65HVD234 3.3-V CAN Bus Transceivers,之前有所顾虑,怕CAN收发器不一样会导致其它后果,之后发现没有问题。以上为本人的一点心得,走了很多弯路。。。记录点滴,以此自励。

相关文章推荐
- 调试OTM4001A液晶驱动的一点心得
- 调试STM32总结
- 关于51单片机用红外遥控步进马达实验的一点心得总结
- 心得与吐槽——十天痛苦调试的总结
- GC_CLK和CC_CLK专用时钟管脚的一点应用心得和时钟延迟调试
- 调试OTM4001A液晶驱动的一点心得
- 调试STM32总结
- 在STM32上移植FreeModbus RTU的一点经验总结
- DELPHI调试WINDOWS服务的一点心得(转)
- 最近调试STM32 UDP功能的一些心得
- STM32和ad7606的spi调试心得
- STM32学习的总结编译调试错误
- js断点调试心得总结
- 【心得】关于session+(servlet和applet)的一点总结
- maven+jetty插件调试web项目的一点总结
- 关于 Visual Studio 调试 Global 的一点总结
- 学习HLSL以来的一点心得(一):调试
- IDA6.6远程调试Android应用程序的一点总结
- 在JZ2440板上关于一直Boa服务器的一点心得总结
- 总结一个月以来调试STM32底盘踩过的坑