做机械臂导航时遇到的问题6:实现ROS串口通信的其他方式
2017-12-18 08:50
369 查看
实验室同学做过串口通信方面的任务,留下了一些程序文件,本文参考实验室同学的文件,实现了ROS串口通信。
代码文件上传在百度云:点击链接:https://pan.baidu.com/s/1hsIm1HM 密码:xlpj
共四个文件
本文是在“做机械臂导航时遇到的问题4:如何订阅joint_states话题(输出关节状态)”基础上实现的。
一、复制、修改文件
1、将cJSON.h、uart.h文件拷贝到beginner_tutorials包内的include文件夹内
2、将cJSON.c、uart.c文件拷贝到beginner_tutorials包内的src文件夹内
3、修改beginner_tutorials目录下的CMakeList.txt内容,修改后如下:(倒数第二段的talker部分是当初测试用的,可以不加)
cmake_minimum_required(VERSION 2.8.3)
project(beginner_tutorials)
## Find catkin and any catkin packages
find_package(catkin REQUIRED COMPONENTS roscpp rospy std_msgs genmsg)
## Declare ROS messages and services
#add_message_files(FILES Num.msg)
#add_service_files(FILES AddTwoInts.srv)
## Generate added messages and services
#generate_messages(DEPENDENCIES std_msgs)
## Declare a catkin package
catkin_package()
## Build talker and listener
include_directories(include)
AUX_SOURCE_DIRECTORY(src DIR_SRCS)
#set environment variable
SET(TEST_MATH
${DIR_SRCS}
)
add_executable(ta
4000
lker src/talker.cpp)
target_link_libraries(talker ${catkin_LIBRARIES})
add_dependencies(talker beginner_tutorials_generate_messages_cpp)
add_executable(listener src/listener.cpp src/cJSON.c src/uart.c)
target_link_libraries(listener ${catkin_LIBRARIES})
add_dependencies(listener beginner_tutorials_generate_messages_cpp)4、修改beginner_tutorials目录下的package.xml内容,如下:
<?xml version="1.0"?>
<package>
<name>beginner_tutorials</name>
<version>0.0.0</version>
<description>The beginner_tutorials package</description>
<!-- One maintainer tag required, multiple allowed, one person per tag -->
<!-- Example: -->
<!-- <maintainer email="jane.doe@example.com">Jane Doe</maintainer> -->
<maintainer email="xs@todo.todo">xs</maintainer>
<!-- One license tag required, multiple allowed, one license per tag -->
<!-- Commonly used license strings: -->
<!-- BSD, MIT, Boost Software License, GPLv2, GPLv3, LGPLv2.1, LGPLv3 -->
<license>TODO</license>
<!-- Url tags are optional, but multiple are allowed, one per tag -->
<!-- Optional attribute type can be: website, bugtracker, or repository -->
<!-- Example: -->
<!-- <url type="website">http://wiki.ros.org/beginner_tutorials</url> -->
<!-- Author tags are optional, multiple are allowed, one per tag -->
<!-- Authors do not have to be maintainers, but could be -->
<!-- Example: -->
<!-- <author email="jane.doe@example.com">Jane Doe</author> -->
<!-- The *_depend tags are used to specify dependencies -->
<!-- Dependencies can be catkin packages or system dependencies -->
<!-- Examples: -->
<!-- Use build_depend for packages you need at compile time: -->
<!-- <build_depend>message_generation</build_depend> -->
<!-- Use buildtool_depend for build tool packages: -->
<!-- <buildtool_depend>catkin</buildtool_depend> -->
<!-- Use run_depend for packages you need at runtime: -->
<!-- <run_depend>message_runtime</run_depend> -->
<!-- Use test_depend for packages you need only for testing: -->
<!-- <test_depend>gtest</test_depend> -->
<buildtool_depend>catkin</buildtool_depend>
<build_depend>roscpp</build_depend>
<build_depend>rospy</build_depend>
<build_depend>std_msgs</build_depend>
<run_depend>roscpp</run_depend>
<run_depend>rospy</run_depend>
<run_depend>std_msgs</run_depend>
<!-- The export tag contains other, unspecified, tags -->
<export>
<!-- Other tools can request additional information be placed here -->
</export>
</package>
二、创建listener.cpp文件
在“做机械臂导航时遇到的问题4”中我们创建了listener.cpp订阅/jointstates话题,在这里我们修改listener.cpp内容实现ROS串口通信,listener.cpp代码内容如下:
#include "ros/ros.h"
#include "std_msgs/String.h"
#include "uart.h"
#include "cJSON.h"
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <string>
#include <sstream>
#include "sensor_msgs/JointState.h"
#include <unistd.h>
#include <ctype.h>
#include <signal.h>
int g_quit;
unsigned char jointstates[2];
static UART_HANDLE uart_hd;
//回调函数,注意话题消息的类型
void statesCallback(const sensor_msgs::JointStateConstPtr& msg)
{
float pos[3],vel[3];
unsigned char info[100];
//将需要的信息取出
pos[0]=msg->position[2];
pos[1]=msg->position[0];
pos[2]=msg->position[1];
vel[0]=msg->velocity[2];
vel[1]=msg->velocity[0];
vel[2]=msg->velocity[1];
char a[20];
//将数据进行Json封装
char *statesJson;
cJSON *statesJson1, *statesJson2,*statesJson3,*statesJson4;
statesJson1=cJSON_CreateObject();
cJSON_AddItemToObject(statesJson1,"joint_name",cJSON_CreateString("joint_msgs"));
cJSON_AddItemToObject(statesJson1,"joint1",statesJson2 = cJSON_CreateObject());
sprintf(a,"%f",pos[0]);
cJSON_AddStringToObject(statesJson2,"position",a);
sprintf(a,"%f",vel[0]);
cJSON_AddStringToObject(statesJson2,"velocity",a);
cJSON_AddItemToObject(statesJson1,"joint2",statesJson3 = cJSON_CreateObject());
sprintf(a,"%f",pos[1]);
cJSON_AddStringToObject(statesJson3,"position",a);
sprintf(a,"%f",vel[1]);
cJSON_AddStringToObject(statesJson3,"velocity",a);
cJSON_AddItemToObject(statesJson1,"joint3",statesJson4 = cJSON_CreateObject());
sprintf(a,"%f",pos[2]);
cJSON_AddStringToObject(statesJson4,"position",a);
sprintf(a,"%f",vel[2]);
cJSON_AddStringToObject(statesJson4,"velocity",a);
//格式转换
statesJson=cJSON_Print(statesJson1);
printf("jointmessage:\n%s\n",statesJson);
//将char *statesJson格式转换成unsigned char,将statesJson里的内容传给jointstates
int tag;
unsigned char jointstates[strlen(statesJson)];
memset(jointstates,0,strlen(statesJson));
for(int i=0;i<strlen(statesJson);i++)
jointstates[i]=statesJson[i];
//发送数据
tag=uart_send(uart_hd,jointstates,strlen(statesJson));
printf("\ntag=%d message have been sent \n",tag);
}
//接收数据
void uart_rec(const void *msg, unsigned int msglen, void *user_data)
{
if(msglen>0)
{
printf("\nI have received a message form serial port\n");
}
}
#define UART_DEVICE "/dev/ttyUSB0"
int main(int argc, char **argv)
{
ros::init(argc, argv, "listener");
ros::NodeHandle n;
ros::Subscriber sub = n.subscribe("/joint_states", 1000, statesCallback);
int ret = 0;
printf("uart test\n");
//初始化uart串口
ret = uart_init(&uart_hd, UART_DEVICE, 115200, uart_rec, NULL);
if (0 != ret)
{
printf("uart_init error ret = %d\n", ret);
printf("please check up USB port or USB power supply\n");
//return -1;
}
ros::spin();
return 0;
}
三、测试
1、catkin_make 一下工作空间,并source
$catkin_make
$source devel/setup.bash2、连接好两台电脑的串口线,在另一台电脑上启动串口助手
3、打开新终端,启动listener节点
$rosrun beginner_tutorials listener4、在串口助手上可以接收到信息
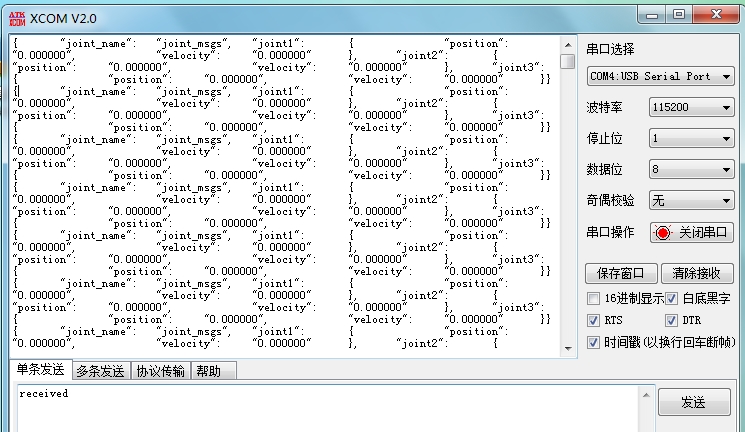
5、Ctrl C终止运行,完成测试
代码文件上传在百度云:点击链接:https://pan.baidu.com/s/1hsIm1HM 密码:xlpj
共四个文件
本文是在“做机械臂导航时遇到的问题4:如何订阅joint_states话题(输出关节状态)”基础上实现的。
一、复制、修改文件
1、将cJSON.h、uart.h文件拷贝到beginner_tutorials包内的include文件夹内
2、将cJSON.c、uart.c文件拷贝到beginner_tutorials包内的src文件夹内
3、修改beginner_tutorials目录下的CMakeList.txt内容,修改后如下:(倒数第二段的talker部分是当初测试用的,可以不加)
cmake_minimum_required(VERSION 2.8.3)
project(beginner_tutorials)
## Find catkin and any catkin packages
find_package(catkin REQUIRED COMPONENTS roscpp rospy std_msgs genmsg)
## Declare ROS messages and services
#add_message_files(FILES Num.msg)
#add_service_files(FILES AddTwoInts.srv)
## Generate added messages and services
#generate_messages(DEPENDENCIES std_msgs)
## Declare a catkin package
catkin_package()
## Build talker and listener
include_directories(include)
AUX_SOURCE_DIRECTORY(src DIR_SRCS)
#set environment variable
SET(TEST_MATH
${DIR_SRCS}
)
add_executable(ta
4000
lker src/talker.cpp)
target_link_libraries(talker ${catkin_LIBRARIES})
add_dependencies(talker beginner_tutorials_generate_messages_cpp)
add_executable(listener src/listener.cpp src/cJSON.c src/uart.c)
target_link_libraries(listener ${catkin_LIBRARIES})
add_dependencies(listener beginner_tutorials_generate_messages_cpp)4、修改beginner_tutorials目录下的package.xml内容,如下:
<?xml version="1.0"?>
<package>
<name>beginner_tutorials</name>
<version>0.0.0</version>
<description>The beginner_tutorials package</description>
<!-- One maintainer tag required, multiple allowed, one person per tag -->
<!-- Example: -->
<!-- <maintainer email="jane.doe@example.com">Jane Doe</maintainer> -->
<maintainer email="xs@todo.todo">xs</maintainer>
<!-- One license tag required, multiple allowed, one license per tag -->
<!-- Commonly used license strings: -->
<!-- BSD, MIT, Boost Software License, GPLv2, GPLv3, LGPLv2.1, LGPLv3 -->
<license>TODO</license>
<!-- Url tags are optional, but multiple are allowed, one per tag -->
<!-- Optional attribute type can be: website, bugtracker, or repository -->
<!-- Example: -->
<!-- <url type="website">http://wiki.ros.org/beginner_tutorials</url> -->
<!-- Author tags are optional, multiple are allowed, one per tag -->
<!-- Authors do not have to be maintainers, but could be -->
<!-- Example: -->
<!-- <author email="jane.doe@example.com">Jane Doe</author> -->
<!-- The *_depend tags are used to specify dependencies -->
<!-- Dependencies can be catkin packages or system dependencies -->
<!-- Examples: -->
<!-- Use build_depend for packages you need at compile time: -->
<!-- <build_depend>message_generation</build_depend> -->
<!-- Use buildtool_depend for build tool packages: -->
<!-- <buildtool_depend>catkin</buildtool_depend> -->
<!-- Use run_depend for packages you need at runtime: -->
<!-- <run_depend>message_runtime</run_depend> -->
<!-- Use test_depend for packages you need only for testing: -->
<!-- <test_depend>gtest</test_depend> -->
<buildtool_depend>catkin</buildtool_depend>
<build_depend>roscpp</build_depend>
<build_depend>rospy</build_depend>
<build_depend>std_msgs</build_depend>
<run_depend>roscpp</run_depend>
<run_depend>rospy</run_depend>
<run_depend>std_msgs</run_depend>
<!-- The export tag contains other, unspecified, tags -->
<export>
<!-- Other tools can request additional information be placed here -->
</export>
</package>
二、创建listener.cpp文件
在“做机械臂导航时遇到的问题4”中我们创建了listener.cpp订阅/jointstates话题,在这里我们修改listener.cpp内容实现ROS串口通信,listener.cpp代码内容如下:
#include "ros/ros.h"
#include "std_msgs/String.h"
#include "uart.h"
#include "cJSON.h"
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <string>
#include <sstream>
#include "sensor_msgs/JointState.h"
#include <unistd.h>
#include <ctype.h>
#include <signal.h>
int g_quit;
unsigned char jointstates[2];
static UART_HANDLE uart_hd;
//回调函数,注意话题消息的类型
void statesCallback(const sensor_msgs::JointStateConstPtr& msg)
{
float pos[3],vel[3];
unsigned char info[100];
//将需要的信息取出
pos[0]=msg->position[2];
pos[1]=msg->position[0];
pos[2]=msg->position[1];
vel[0]=msg->velocity[2];
vel[1]=msg->velocity[0];
vel[2]=msg->velocity[1];
char a[20];
//将数据进行Json封装
char *statesJson;
cJSON *statesJson1, *statesJson2,*statesJson3,*statesJson4;
statesJson1=cJSON_CreateObject();
cJSON_AddItemToObject(statesJson1,"joint_name",cJSON_CreateString("joint_msgs"));
cJSON_AddItemToObject(statesJson1,"joint1",statesJson2 = cJSON_CreateObject());
sprintf(a,"%f",pos[0]);
cJSON_AddStringToObject(statesJson2,"position",a);
sprintf(a,"%f",vel[0]);
cJSON_AddStringToObject(statesJson2,"velocity",a);
cJSON_AddItemToObject(statesJson1,"joint2",statesJson3 = cJSON_CreateObject());
sprintf(a,"%f",pos[1]);
cJSON_AddStringToObject(statesJson3,"position",a);
sprintf(a,"%f",vel[1]);
cJSON_AddStringToObject(statesJson3,"velocity",a);
cJSON_AddItemToObject(statesJson1,"joint3",statesJson4 = cJSON_CreateObject());
sprintf(a,"%f",pos[2]);
cJSON_AddStringToObject(statesJson4,"position",a);
sprintf(a,"%f",vel[2]);
cJSON_AddStringToObject(statesJson4,"velocity",a);
//格式转换
statesJson=cJSON_Print(statesJson1);
printf("jointmessage:\n%s\n",statesJson);
//将char *statesJson格式转换成unsigned char,将statesJson里的内容传给jointstates
int tag;
unsigned char jointstates[strlen(statesJson)];
memset(jointstates,0,strlen(statesJson));
for(int i=0;i<strlen(statesJson);i++)
jointstates[i]=statesJson[i];
//发送数据
tag=uart_send(uart_hd,jointstates,strlen(statesJson));
printf("\ntag=%d message have been sent \n",tag);
}
//接收数据
void uart_rec(const void *msg, unsigned int msglen, void *user_data)
{
if(msglen>0)
{
printf("\nI have received a message form serial port\n");
}
}
#define UART_DEVICE "/dev/ttyUSB0"
int main(int argc, char **argv)
{
ros::init(argc, argv, "listener");
ros::NodeHandle n;
ros::Subscriber sub = n.subscribe("/joint_states", 1000, statesCallback);
int ret = 0;
printf("uart test\n");
//初始化uart串口
ret = uart_init(&uart_hd, UART_DEVICE, 115200, uart_rec, NULL);
if (0 != ret)
{
printf("uart_init error ret = %d\n", ret);
printf("please check up USB port or USB power supply\n");
//return -1;
}
ros::spin();
return 0;
}
三、测试
1、catkin_make 一下工作空间,并source
$catkin_make
$source devel/setup.bash2、连接好两台电脑的串口线,在另一台电脑上启动串口助手
3、打开新终端,启动listener节点
$rosrun beginner_tutorials listener4、在串口助手上可以接收到信息
5、Ctrl C终止运行,完成测试

相关文章推荐
- 做机械臂导航时遇到的问题5:如何使用ROS内嵌serial功能包实现串口通信
- SerialPort类实现串口通信时遇到的多线程问题
- JS实现简易日历过程中遇到的问题和原因以及解决方式。
- 做机械臂导航时遇到的问题2:solidworks用sw_urdf插件生成urdf文件包后,需要修改的部分
- 做机械臂导航时遇到的问题7:正向运动学求解:在关节空间进行规划
- fnzi今天遇到一个事务问题,转载一篇文章,以示鼓励(五种spring事务实现方式)
- 做机械臂导航遇到的问题1:solidworks在生成urdf文件时崩溃的一种解决方法
- 做机械臂导航遇到的问题3:如何用arbotix接口控制机械臂
- 关于用ajax长链接轮询方式实现comet时,其他ajax请求被阻塞的问题
- C# DataTableToExcel的几种实现方式及遇到的问题
- 关于Entity Framework更新的几种方式以及可能遇到的问题(附加类型“Model”的实体失败,因为相同类型的其他实体已具有相同的主键值)在使用 "Attach" 方法或者将实体的状态设置为 "Unchanged" 或 "Modified" 时如果图形中的任何实体具有冲突键值,则可能会发生上述行为
- 采用SQLServer 发布,订阅方式实现数据库同步遇到问题总结
- 做机械臂导航时遇到的问题8:逆运动学求解:在笛卡尔空间规划
- android 两种方式实现沉浸式菜单在项目中所遇到的一些问题
- 做机械臂导航时遇到的问题4:如何订阅joint_states话题(输出关节状态)
- 最近遇到一个非常棘手的需求是关于邮件转发的问题,请大家来帮忙给出出主意如何实现。
- java实现插入mysql二进制文件,blob类型,遇到问题及解决办法
- java实现插入mysql二进制文件,blob类型,遇到问题及解决办法
- js,java实现escape()和unescape()函数解决以给方式提交中中文参数问题
- Multibin 实现遇到的两个问题