四旋翼无人机PID控制
2017-12-15 16:14
127 查看
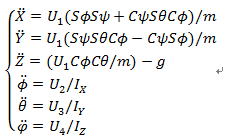
一、建立四旋翼无人机动力学方程
二、确定PID控制律
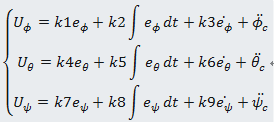
1、姿态控制回路
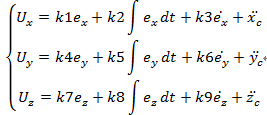
2、位置控制回路
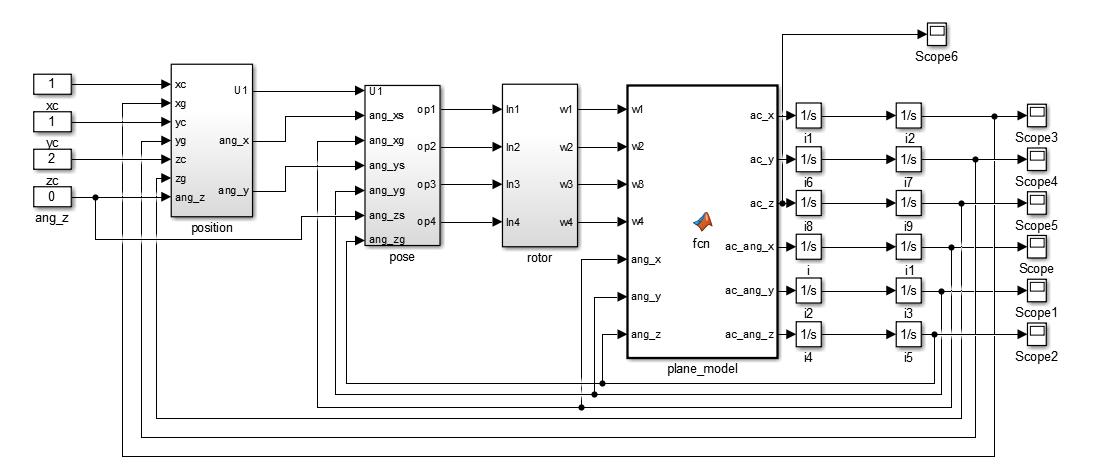
3、仿真图
二、确定PID控制律
1、姿态控制回路
2、位置控制回路
3、仿真图

相关文章推荐
- PID控制——简而优秀
- PID控制算法举例之(一)
- PID控制通俗解释与PID参数的整定方法--以温控系统为例
- 玩转四旋翼无人机(传感器)
- 玩转四旋翼无人机(pixhawk飞控校准)
- 神经网络及其PID控制
- Pid控制算法-位置型pid算法的C++实现
- 今天开始学PID电机控制,这个作者写得很不错,和大家分享一下~~~ PID控制算法通俗理解 作者:whut_wj 来源:http://blog.eccn.com/space.php?uid=35
- 神经网络PID控制
- 增量式PID控制算法
- PID控制
- PID控制算法 C程序的两种表述
- 建造你自己的四旋翼无人机--核心技术介绍
- 玩转四旋翼无人机(四元数)
- 【iCore3应用开发平台】发布 iCore3 应用开发平台PID控制代码
- Pid控制算法-增量型pid算法的C++实现
- (2)时间最优PID控制
- 《PID控制算法的C语言实现》学习笔记
- PID控制原理
- 【原创】PID控制算法模拟器