ArUco----一个微型现实增强库的介绍及视觉应用(一)
2017-12-07 09:50
1016 查看
ArUco----一个微型现实增强库的介绍及视觉应用(一)一、ArUco简介

ArUco是一个开源的微型的现实增强库,目前好像已经集成在OpenCV3.0以上的版本内了,它除了用于现实增强,还很用于实现一些机器视觉方面的应用,上图中的波士顿动力也曾用此方法用于Atlas的视觉定位,下面是两个重要的网址: ArUco下载地址:ArUco下载(可以下载2.0.19或3.0.0) ArUco的Marker生成网址:Marker生成(可以定制Marker的size、ID以及Padding) ArUco开源库的几个特点如下: 1.基于C++; 2.仅依赖于OpenCV(≥2.4.9)和Eigen3(源码中已经包含); 3.BDS开源。二、ArUco安装 本示例以Linux(Ubuntu14.04)为例进行安装和使用说明。按照上节地址下载完成源码后放在Linux系统自己的某个文件夹下面,然后进行安装,具体步骤为: 1. cd aruco-2.0.19(进入目录); 2. mkdir build(建立编译文件夹); 3.cd build(进入文件夹); 4.cmake .. 5.make -j4 至此编译安装完成,主目录树如下:
aruco::MarkerDetector----视觉标志检测类;
aruco::MarkerPoseTracker----视觉标志姿态预估类;
aruco::MarkerMap-----视觉标志地图类;
aruco::MarkerMapPoseTracker----视觉标志地图姿态预估类;
aruco::CvDrawingUtils----绘图类;四、利用ArUco对相机进行校准
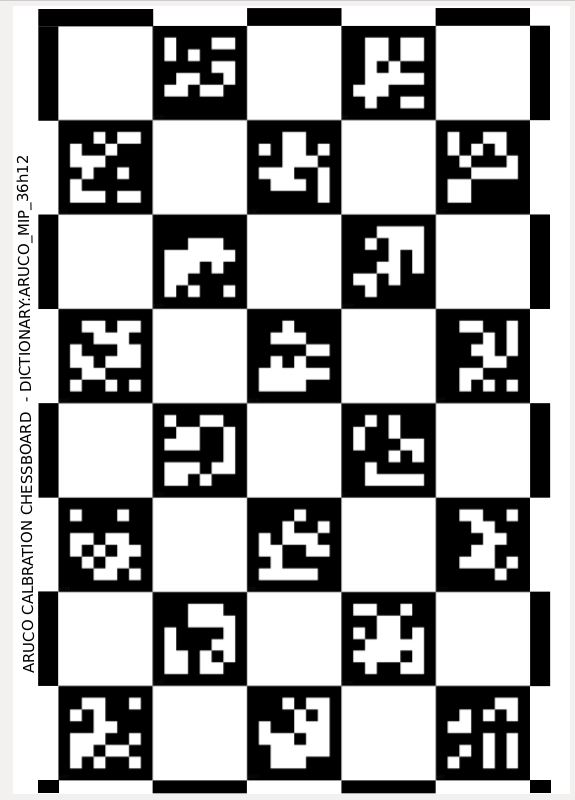
视觉校准标准标志地图 在文件夹/aruco-2.0.19/utils_calibration内,可以看到:aruco_calibration_board_a4.pdf,打印出来就可以用于相机的校准了,具体步骤如下:进入刚才编译完成的文件夹:/aruco-2.0.19/build/utils_calibration,该相机校准支持图片方式、录像方式和实时模式(本文以后者为例),在此文件夹下,输入命令:/aruco-2.0.19/build/utils_calibration$ ./aruco_calibration live out_camera_calibration.yml -size "0.04"几个参数解释如下:live ----实时模式;out_ca
4000
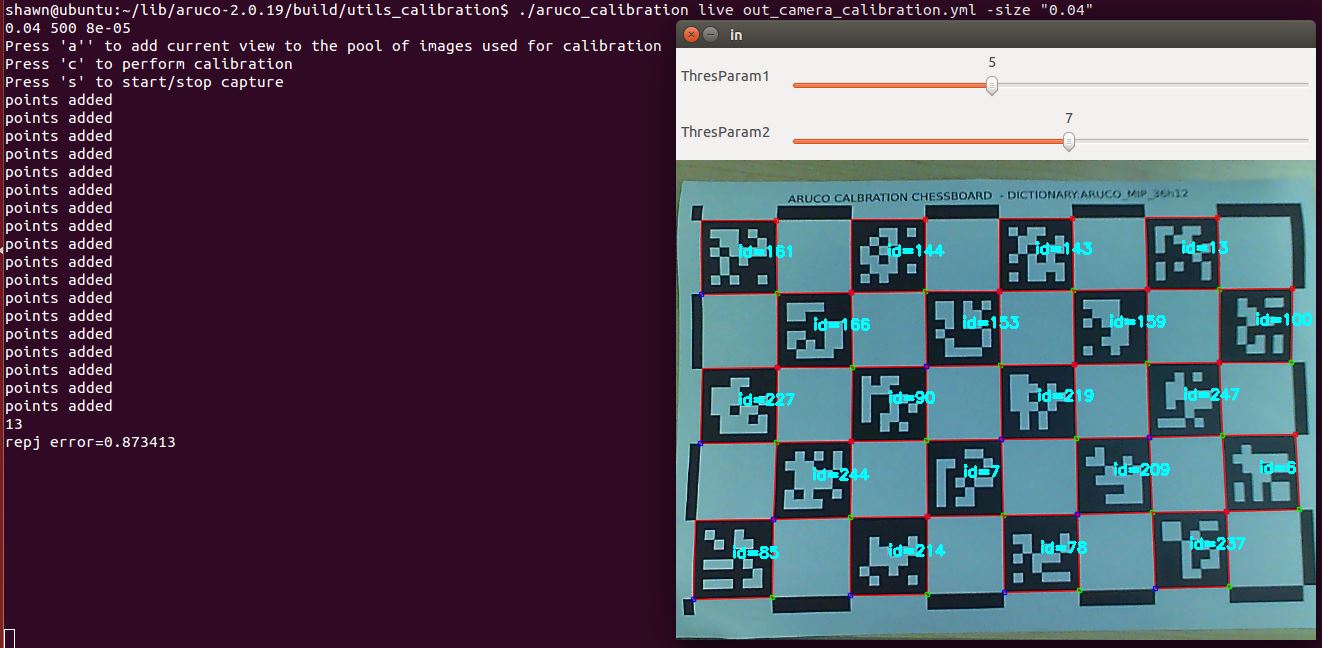
mera_calibration.yml ----校准参数输出文件名称;-size "0.04"----校准标志的尺寸(单位:m)正常会出现如下信息:
0.04 500 8e-05
Press 'a'' to add current view to the pool of images used for calibration
Press 'c' to perform calibration
Press 's' to start/stop capture此时按照指示输入字母s开始图像捕捉,每次找到合适的视角后就点击a,直到所有的视角都完成后输入c开始相机校准,最后效果如下图所示:
至此,我们对这个开源库有了基本的了解,下一篇将举一个具体的使用的代码供参考。
ArUco是一个开源的微型的现实增强库,目前好像已经集成在OpenCV3.0以上的版本内了,它除了用于现实增强,还很用于实现一些机器视觉方面的应用,上图中的波士顿动力也曾用此方法用于Atlas的视觉定位,下面是两个重要的网址: ArUco下载地址:ArUco下载(可以下载2.0.19或3.0.0) ArUco的Marker生成网址:Marker生成(可以定制Marker的size、ID以及Padding) ArUco开源库的几个特点如下: 1.基于C++; 2.仅依赖于OpenCV(≥2.4.9)和Eigen3(源码中已经包含); 3.BDS开源。二、ArUco安装 本示例以Linux(Ubuntu14.04)为例进行安装和使用说明。按照上节地址下载完成源码后放在Linux系统自己的某个文件夹下面,然后进行安装,具体步骤为: 1. cd aruco-2.0.19(进入目录); 2. mkdir build(建立编译文件夹); 3.cd build(进入文件夹); 4.cmake .. 5.make -j4 至此编译安装完成,主目录树如下:
├── matlab ├── src │ └── markerlabelers ├── tests ├── utils ├── utils_calibration ├── utils_gl └── utils_markermapsrc----源码; utils----使用示例; utils_calibration----相机校准程序; utils_markermap----Marker Map使用示例; utils_gl----本库及OpenGL的使用; utils----单独视觉标志检测示例;三、ArUco使用 该库主要的类主要有: aruco::Marker----视觉标志类;
aruco::MarkerDetector----视觉标志检测类;
aruco::MarkerPoseTracker----视觉标志姿态预估类;
aruco::MarkerMap-----视觉标志地图类;
aruco::MarkerMapPoseTracker----视觉标志地图姿态预估类;
aruco::CvDrawingUtils----绘图类;四、利用ArUco对相机进行校准
视觉校准标准标志地图 在文件夹/aruco-2.0.19/utils_calibration内,可以看到:aruco_calibration_board_a4.pdf,打印出来就可以用于相机的校准了,具体步骤如下:进入刚才编译完成的文件夹:/aruco-2.0.19/build/utils_calibration,该相机校准支持图片方式、录像方式和实时模式(本文以后者为例),在此文件夹下,输入命令:/aruco-2.0.19/build/utils_calibration$ ./aruco_calibration live out_camera_calibration.yml -size "0.04"几个参数解释如下:live ----实时模式;out_ca
4000
mera_calibration.yml ----校准参数输出文件名称;-size "0.04"----校准标志的尺寸(单位:m)正常会出现如下信息:
0.04 500 8e-05
Press 'a'' to add current view to the pool of images used for calibration
Press 'c' to perform calibration
Press 's' to start/stop capture此时按照指示输入字母s开始图像捕捉,每次找到合适的视角后就点击a,直到所有的视角都完成后输入c开始相机校准,最后效果如下图所示:
至此,我们对这个开源库有了基本的了解,下一篇将举一个具体的使用的代码供参考。

相关文章推荐
- ArUco----一个微型现实增强库的介绍及视觉应用(二)
- 增强现实(AR:Augmented Reality ) 之介绍及应用
- Vuforia 2014 视觉大奖赛:寻找最炫酷AR增强现实应用,迈向巅峰!
- 增强现实技术(AR)及扩展应用
- android studio | openGL es 3.0增强现实(AR)开发 (3) OpenGL es3.0基本知识介绍
- 一个不错的介绍企业应用集成和ESB的PPT
- Elements 4D:一款深深吸引我的增强现实学习应用
- 初尝用Unity3D配合Vuforia开发适合Cardboard的AR(增强现实)应用
- 增强现实技术(AR)及扩展应用
- AR增强现实在现实生活中的应用
- 图像识别和增强现实应用Blippar即将登陆Google Glass
- 【Android】增强现实应用——AR画报
- 增强现实技术(AR)及扩展应用
- 一个不错的介绍企业应用集成和ESB的PPT
- 震撼,厉害了,我的Google,谷歌宣布ARCore结束预览模式 大批增强现实应用即将涌现
- Python微型web开发框架flask介绍及一个小例子
- 虚拟现实及增强现实(眼镜或头盔)现状与未来-基本介绍
- 一个不错的介绍企业应用集成和ESB的PPT
- AR(增强现实)应用 2014年产值将达$7亿1400万
- 自己动手写一个推荐系统,推荐系统小结,推荐系统:总体介绍、推荐算法、性能比较, 漫谈“推荐系统”, 浅谈矩阵分解在推荐系统中的应用