ORB-Slam详解2 代码流程
2017-12-04 13:52
423 查看
转载自http://blog.csdn.net/u010128736/
ORB_SLAM的代码非常整齐,简洁,便于阅读。由于我将使用其做室外场景的单目SLAM,所以我们从mono_kitti.cc这个主程序来看整个代码。为了更加方便阅读,我将其中的关键步骤做成思维导图,这样就可以一目了然了。喜欢的朋友请点赞!~
如下图所示,程序在接收参数传递的参数后,就能够找到存放数据和参数的目录,开始运行。
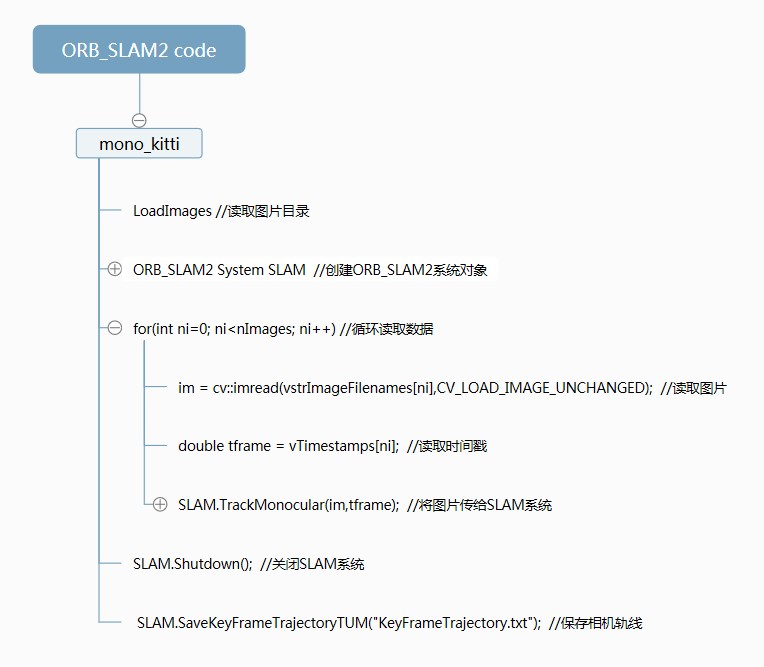
(1)首先使用LoadImages读取图片目录和时间戳文件
(2)创建ORB_SLAM2::System对象
(3)循环读取数据
(3.1)读取图片
(3.2)读取时间戳
(3.3)将图片传给SLAM系统
(4)关闭SLAM系统
(5)将相机轨线保存到硬盘中
在主函数中,我们创建了一个ORB_SLAM2::System的对象SLAM,这个时候就会进入到SLAM系统的主接口System.cc。这个代码是所有调用SLAM系统的主入口,在这里,我们将看到前面博客所说的ORB_SLAM的三大模块:Tracking、Mapping和LoopClosing。如下图所示:
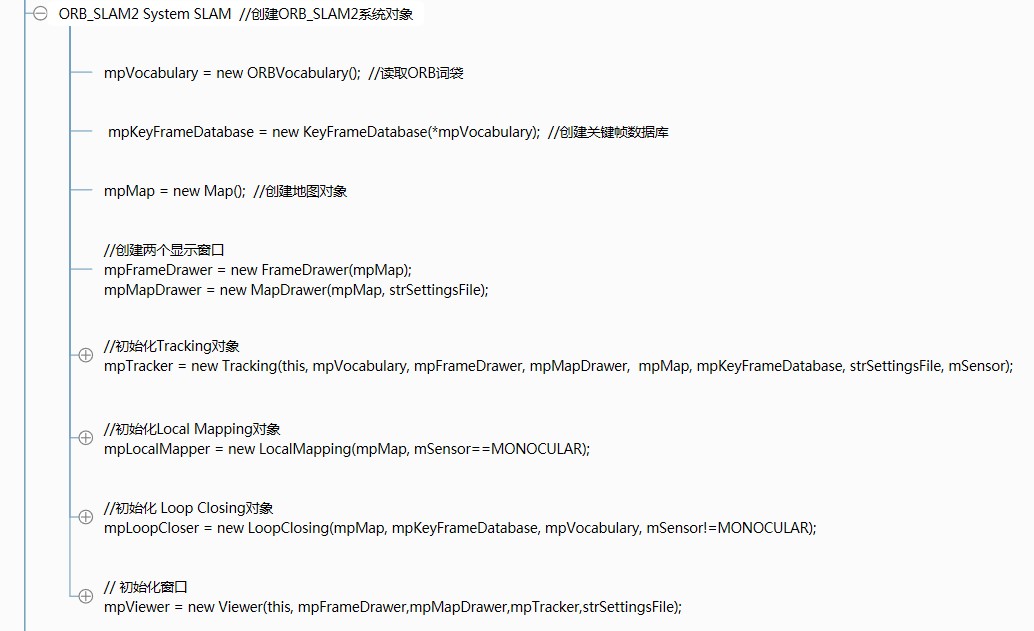
我们可以看到在这个对象的实例化过程中,我们创建了以下对象:
(1)创建了ORB词袋的对象
(2)创建了关键帧的数据库
(3)创建地图对象
(4)创建两个显示窗口
(5)初始化Tracking对象
(6)初始化Local Mapping对象,并开启线程运行
(7)初始化Loop Closing对象,并开启线程运行
(8)初始化窗口,开启线程显示图像和地图点
在这个实例化的过程中,我们开启了三个线程,分别是Local Mapping、Loop Closing和窗口显示的线程,那第一步Tracking在哪里运行呢?
上面我们提到Tracking的运行入口,回顾第一部分,我们在循环读取图片的时候,调用了一个SLAM.TrackMonocular()函数,这个函数就是在主线程里调用Tracking的函数入口了。所以Tracking是运行在主线程中,并且在每次读取一帧新的图像时运行一次。如下图所示:
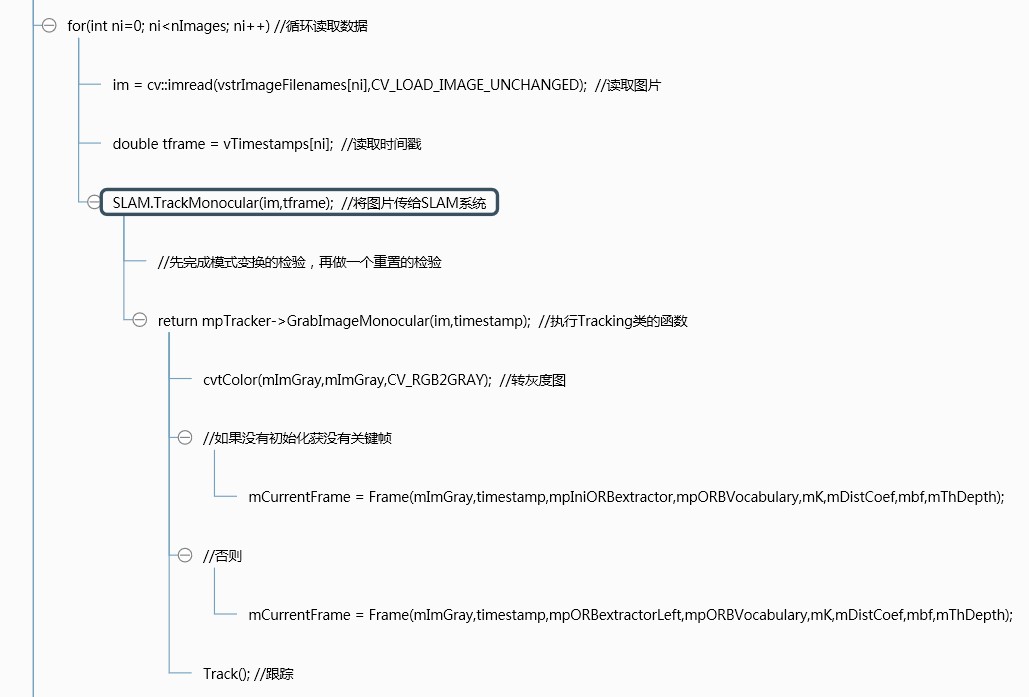
可以看到,跟了两步之后,就能很清晰地看到,程序将读取的图片转成灰度图,然后对帧进行特征点检测,就直接调用Tracking.cc中的Track()函数,进行跟踪。另外要注意的是,由于使用的是单目相机,所以在跟踪时需要判断是否初始化或有没有前序关键帧,如果没有,使用mpIniORBextractor的参数进行特征点检测。
一、整体框架
ORB_SLAM的代码非常整齐,简洁,便于阅读。由于我将使用其做室外场景的单目SLAM,所以我们从mono_kitti.cc这个主程序来看整个代码。为了更加方便阅读,我将其中的关键步骤做成思维导图,这样就可以一目了然了。喜欢的朋友请点赞!~ 如下图所示,程序在接收参数传递的参数后,就能够找到存放数据和参数的目录,开始运行。
(1)首先使用LoadImages读取图片目录和时间戳文件
(2)创建ORB_SLAM2::System对象
(3)循环读取数据
(3.1)读取图片
(3.2)读取时间戳
(3.3)将图片传给SLAM系统
(4)关闭SLAM系统
(5)将相机轨线保存到硬盘中
二、SLAM系统的创建
在主函数中,我们创建了一个ORB_SLAM2::System的对象SLAM,这个时候就会进入到SLAM系统的主接口System.cc。这个代码是所有调用SLAM系统的主入口,在这里,我们将看到前面博客所说的ORB_SLAM的三大模块:Tracking、Mapping和LoopClosing。如下图所示: 我们可以看到在这个对象的实例化过程中,我们创建了以下对象:
(1)创建了ORB词袋的对象
(2)创建了关键帧的数据库
(3)创建地图对象
(4)创建两个显示窗口
(5)初始化Tracking对象
(6)初始化Local Mapping对象,并开启线程运行
(7)初始化Loop Closing对象,并开启线程运行
(8)初始化窗口,开启线程显示图像和地图点
在这个实例化的过程中,我们开启了三个线程,分别是Local Mapping、Loop Closing和窗口显示的线程,那第一步Tracking在哪里运行呢?
三、Tracking的运行
上面我们提到Tracking的运行入口,回顾第一部分,我们在循环读取图片的时候,调用了一个SLAM.TrackMonocular()函数,这个函数就是在主线程里调用Tracking的函数入口了。所以Tracking是运行在主线程中,并且在每次读取一帧新的图像时运行一次。如下图所示: 可以看到,跟了两步之后,就能很清晰地看到,程序将读取的图片转成灰度图,然后对帧进行特征点检测,就直接调用Tracking.cc中的Track()函数,进行跟踪。另外要注意的是,由于使用的是单目相机,所以在跟踪时需要判断是否初始化或有没有前序关键帧,如果没有,使用mpIniORBextractor的参数进行特征点检测。

相关文章推荐
- ORB_SLAM2 Monocular 代码流程解析
- ORB-SLAM代码详解之代码框架
- ORB-SLAM代码详解之SLAM系统初始化
- ORB-SLAM2详解(二)代码逻辑
- ORB-SLAM2详解(二)代码逻辑
- ORB-SLAM代码详解之SLAM.TrackMonocular
- ORB-SLAM2代码逻辑流程图——Tracking线程
- ORB-SLAM中 ORBextract.cpp代码解读
- ORB-SLAM2详解(三)自动地图初始化
- DBoW2原理与代码分析(结合ORB_SLAM2)
- ORB-Slam2详解3 地图初始化
- ORB-SLAM2详解(四)跟踪
- .net/c#中栈和堆的区别及代码在栈和堆中的执行流程详解之一
- ORB_SLAM2代码解析[1]
- ORB-SLAM2详解(五)局部建图
- 微信小程序中的微信支付js代码和流程详解
- SLAM入门之ORBSLAM2代码理解——系统框架
- 基于JavaScript+HTML5 实现打地鼠小游戏逻辑流程图文详解(附完整代码)
- 关于mac 提交代码到github上的流程(详解)
- ORBSlam2学习研究-Tracking流程