ROS程序开机自启动
2017-11-21 20:25
281 查看
参考:http://blog.sina.com.cn/s/blog_602f87700102wqy9.html
其它精华帖:http://blog.csdn.net/u011118482/article/details/76549144
如果人工手动启动机器人,当给机器人加电时候,我们需要ssh到机器人端,然后启动激光的驱动launch文件,机器人启动的launch文件,导航的launch文件等,这对机器人的操作很不方便。
如果我们希望当机器人上电以后,会自动启动一些传感器的驱动文件,定位导航,建图所需要的文件,并能按照我们的设定实现一定的功能,比如相应客户端的命令,并按照客户端的指令来动作,或者开机以后,自动对所在的环境进行建图和导航等。我们需要进行开机自启动的设置。本文即介绍机器人开机自启动的方法和步骤
目前关于机器人开机自启动的设置大体上有下面几种方法:
1、使用自启动的ros包upstart
该包是通过创建一个服务来启动一些基本的launch文件,要是启动多个launch文件,可以通过把多个launch文件写入到一个launch中这样的方法来启动。
2、利用ubuntu自带的开机启动文件
在开机启动文件rc.local文件中直接写入ros命令来达到开机启动效果
3. Linux 经典方式, 开机启动Service:
4. 简单暴力的 rc.local (问题较多的方法):
现依次介绍如下:
1. ROS官方方法:
Robot_upstart:
The robot_upstart package provides scripts which may be used to install and uninstall Ubuntu Linux upstart jobs which launch groups of roslaunch files.
所以,这个方法可能仅支持Ubuntu Linux。它提供scripte来安装和卸载随机启动的ROS工作。 可以使用roslaunch等。
1.1:安装(kinetic-ROS下):
$sudo apt-get install ros-kinetic-robot-upstart
1.2: 设置某个Package的launch文件为开机启动 .launch:
假如有个Package:beacool_bringup, 它其中有个 .launch文件----beacool_bringup/launch/minimal.launch
$rosrun robot_upstart install beacool_bringup/launch/minimal.launch
这里容易出以下几个问题:
A. 找不到launch文件:
A1:确保package_name/launch/目录的正确。
A2:确保roscd package_name 可以进入。(说明:source ~/catkin_ws/devel/setup.bash 已经起效)
另一点要注意的是Log:
Preparing to install files to the following paths:
/etc/init/beacool.conf
/etc/ros/indigo/beacool.d/.installed_files
此时,Ubuntu启动时,这个Launch就会被调用。
1.3: 其它关键信息:
1.3.1: service名:
service名为:包名的一部分,在以上例子中,Package_Name: beacool_bringup. 所以service名为:beacool
1.3.2: 停止开机启动:
rosrun robot_upstart uninstall service名
rosrun robot_upstart uninstall beacool
1.3.3: service 启动和停止:
sudo service beacool start
sudo service beacool stop
1.3.4: 察看log:
sudo vi /var/log/upstart/beacool.log
网络上不少地方在描述这部分工作时:均不讲清楚 service名从何而来。带来不少误解。所以专门用红色标记service名
2. 使用Linux桌面系统对应开机启动程序:
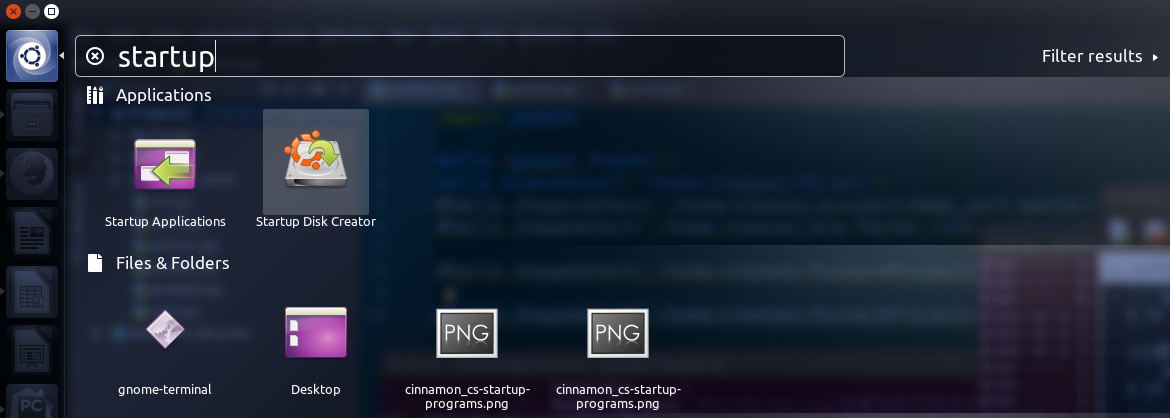
(1)点击Dash home打开Dash home。在检索窗里键入Startup application;也可以在终端输入:gnome-session-properties来启动。
(2)显示出来的“Startup Applications”称为Startup Application Manager。点击打开Startup Application Manager,点击Add
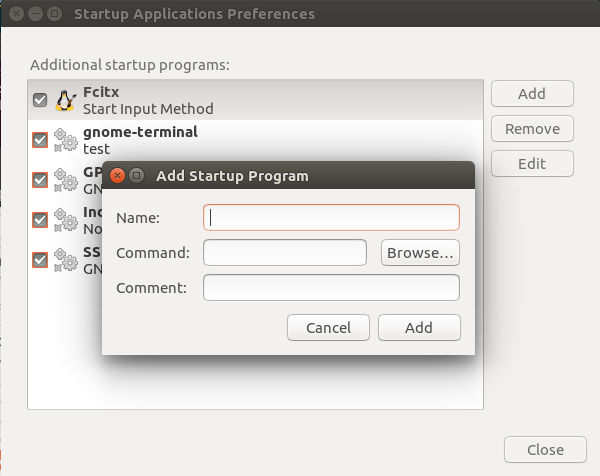
“Name”可以是任意名称,给要启动的程序起个名字。当然是简单易懂明了的为好。
“Command”处记入启动电脑时要执行的命令或者是要启动的程序的所在,可以使用“Browse”这个按钮来设定要启动的程序的所在。
“Comment”处可记入一些说明。也可以不记入(当然“name”的地方也可以不记入。不过以后用起来很不方便)。
点击下面的“Add”按钮即可设定好想要在启动电脑时启动的程序了。
可ROS 程序如何启动呢?
其实思路很简单,就是运行一个终端程序,终端程序则运行一个脚本,这个脚本中设置ROS, 启动ROS应用程序。
假如想启动的 .launch为: beacool_bringup 包内的minimal.launch
所以创建启动脚本如下:
#! /bin/bash
source /opt/ros/indigo/setup.sh
source /home/exbot/devel/setup.bash
roslaunch beacool_bringup minimal.launch
其次:在启动程序的命令列表中,使用:
gnome-terminal -x /home/exbot/catkin_ws/beacool_ros/beacool_run.sh
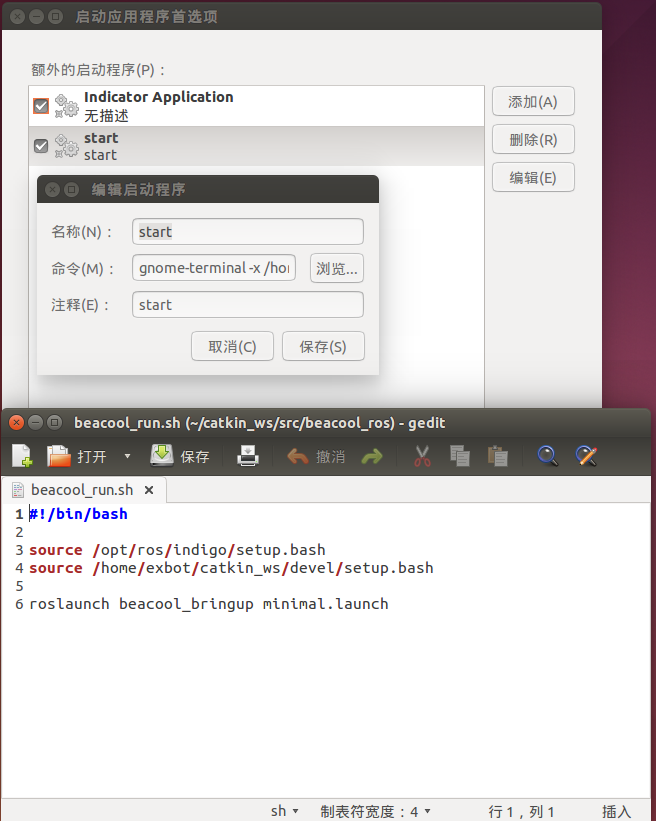
则系统每次启动后,会开启一个终端窗口,并执行脚本中的launch.
此方法在大部分ubuntu+ROS下有用。但在TK1 Ubuntu下未起作用,暂时不知怎么回事。
3. Linux 经典方式, 开机启动Service:
首先介绍背景知识:Linux启动时,可以启动一些Service。 Sam很早之前搞Linux机顶盒,Android机顶盒时。很多程序就是以Service形式启动的。
3.1: 创建Service的方法:
A: 在/etc/init.d/目录下,创建要启动的脚本。例如名为:beacool_rfkill 这个脚本用来启动 bluetooth.
内容如下:
rfkill unblock bluetooth
B: 把脚本增加入Service:
$ cd /etc/init.d
$ sudo update-rc.d beacool_rfkill defaults 95
此时,会把脚本beacool_rfkill 加入到/etc/rcX.d/目录中。X:0-6, 分别表示不同的启动级别。3为字符界面启动,5为GUI启动。其它不关键。
脚本名则在/etc/rc3.d/中变为:S95beacool_rfkill
命令中,最后的数字表示表示启动顺序。
C: 如果想要去掉此Service:
$ cd /etc/init.d
$ sudo update-rc.d -f beacool_rfkill remove
3.2: ROS程序使用Service方式启动:
为了查看脚本是否有效,可以查看log. Sam在脚本中作了如下动作:
roslaunch beacool_nav amcl_demo.launch >> /home/ubuntu/catkin_ws/src/beacool.log 2>&1
这样,就会把log 发送到指定目录。
Log如下:
/etc/rc2.d/S96dashgo_launch: 1: /etc/rc2.d/S96dashgo_launch: roslaunch: not found
这说明 ros没加入环境变量中。需要先把环境变量设置好。
可参见后面的写法:
. /opt/ros/indigo/setup.sh
. /home/ubuntu/catkin_ws/devel/setup.sh
roslaunch beacool_bringup minimal.launch
此办法有个缺点:
如果有多个ROS工程要加入,例如:其中一个加为S98, 另一个加为S99。则S98会被执行。而S99并未执行。
虽然也可以后台执行,但会导致前一个退出。
所以如果一定要采用此方法:
可以把多个Launch合并。(并不建议)
4. 简单暴力的 rc.local (问题较多的方法):
/etc/rcX.d/中,都包含了/etc/init.d/rc.local. 通常都是最后一刻加入的,例如:S99rc.local
而它又引用了 /etc/rc.local
所以,可以简单的在/etc/rc.local 的exit 0 之前加入调用。
例如:想要加入一个ROS项目:beacool_bringup 的minimal.launch.
A: 先创建一个script:
. /opt/ros/indigo/setup.sh
. /home/ubuntu/catkin_ws/devel/setup.sh
roslaunch beacool_bringup minimal.launch
请注意:此时并没有使用source /opt/ros/indigo/setup.bash.
而是采用 . /opt/ros/indigo/setup.sh
是因为此时bash还未启动,而source是bash内部命令。此时找不到source.
B: 修改其权限:
sudo chmod 777 beacool_launch
C: 加入rc.local:
/etc/init.d/beacool_launch
此办法有个和方法3类似的缺点:
1. 加入后,如果ROS 程序不退出,则阻塞在这里。这意味着如果要启动多个launch. 则下一个不会被执行。
2. 当然有朋友会说,可以后台执行嘛。
/etc/init.d/beacool_launch &
但如果后面再启一个launch, 前面beacool_launch所启动的ROS项目会退出。
所以如果一定要采用此方法:
可以把多个Launch合并。(并不建议)
设置了程序自启动之后,需要把Ubuntu的开机密码取消掉,这样就不需要人为登录,设置方法
4000
参考如下:
https://jingyan.baidu.com/article/0320e2c1d4da0b1b87507b31.html
其它精华帖:http://blog.csdn.net/u011118482/article/details/76549144
如果人工手动启动机器人,当给机器人加电时候,我们需要ssh到机器人端,然后启动激光的驱动launch文件,机器人启动的launch文件,导航的launch文件等,这对机器人的操作很不方便。
如果我们希望当机器人上电以后,会自动启动一些传感器的驱动文件,定位导航,建图所需要的文件,并能按照我们的设定实现一定的功能,比如相应客户端的命令,并按照客户端的指令来动作,或者开机以后,自动对所在的环境进行建图和导航等。我们需要进行开机自启动的设置。本文即介绍机器人开机自启动的方法和步骤
目前关于机器人开机自启动的设置大体上有下面几种方法:
1、使用自启动的ros包upstart
该包是通过创建一个服务来启动一些基本的launch文件,要是启动多个launch文件,可以通过把多个launch文件写入到一个launch中这样的方法来启动。
2、利用ubuntu自带的开机启动文件
在开机启动文件rc.local文件中直接写入ros命令来达到开机启动效果
3. Linux 经典方式, 开机启动Service:
4. 简单暴力的 rc.local (问题较多的方法):
现依次介绍如下:
1. ROS官方方法:
Robot_upstart:
The robot_upstart package provides scripts which may be used to install and uninstall Ubuntu Linux upstart jobs which launch groups of roslaunch files.
所以,这个方法可能仅支持Ubuntu Linux。它提供scripte来安装和卸载随机启动的ROS工作。 可以使用roslaunch等。
1.1:安装(kinetic-ROS下):
$sudo apt-get install ros-kinetic-robot-upstart
1.2: 设置某个Package的launch文件为开机启动 .launch:
假如有个Package:beacool_bringup, 它其中有个 .launch文件----beacool_bringup/launch/minimal.launch
$rosrun robot_upstart install beacool_bringup/launch/minimal.launch
这里容易出以下几个问题:
A. 找不到launch文件:
A1:确保package_name/launch/目录的正确。
A2:确保roscd package_name 可以进入。(说明:source ~/catkin_ws/devel/setup.bash 已经起效)
另一点要注意的是Log:
Preparing to install files to the following paths:
/etc/init/beacool.conf
/etc/ros/indigo/beacool.d/.installed_files
此时,Ubuntu启动时,这个Launch就会被调用。
1.3: 其它关键信息:
1.3.1: service名:
service名为:包名的一部分,在以上例子中,Package_Name: beacool_bringup. 所以service名为:beacool
1.3.2: 停止开机启动:
rosrun robot_upstart uninstall service名
rosrun robot_upstart uninstall beacool
1.3.3: service 启动和停止:
sudo service beacool start
sudo service beacool stop
1.3.4: 察看log:
sudo vi /var/log/upstart/beacool.log
网络上不少地方在描述这部分工作时:均不讲清楚 service名从何而来。带来不少误解。所以专门用红色标记service名
2. 使用Linux桌面系统对应开机启动程序:
(1)点击Dash home打开Dash home。在检索窗里键入Startup application;也可以在终端输入:gnome-session-properties来启动。
(2)显示出来的“Startup Applications”称为Startup Application Manager。点击打开Startup Application Manager,点击Add
“Name”可以是任意名称,给要启动的程序起个名字。当然是简单易懂明了的为好。
“Command”处记入启动电脑时要执行的命令或者是要启动的程序的所在,可以使用“Browse”这个按钮来设定要启动的程序的所在。
“Comment”处可记入一些说明。也可以不记入(当然“name”的地方也可以不记入。不过以后用起来很不方便)。
点击下面的“Add”按钮即可设定好想要在启动电脑时启动的程序了。
可ROS 程序如何启动呢?
其实思路很简单,就是运行一个终端程序,终端程序则运行一个脚本,这个脚本中设置ROS, 启动ROS应用程序。
假如想启动的 .launch为: beacool_bringup 包内的minimal.launch
所以创建启动脚本如下:
#! /bin/bash
source /opt/ros/indigo/setup.sh
source /home/exbot/devel/setup.bash
roslaunch beacool_bringup minimal.launch
其次:在启动程序的命令列表中,使用:
gnome-terminal -x /home/exbot/catkin_ws/beacool_ros/beacool_run.sh
则系统每次启动后,会开启一个终端窗口,并执行脚本中的launch.
此方法在大部分ubuntu+ROS下有用。但在TK1 Ubuntu下未起作用,暂时不知怎么回事。
3. Linux 经典方式, 开机启动Service:
首先介绍背景知识:Linux启动时,可以启动一些Service。 Sam很早之前搞Linux机顶盒,Android机顶盒时。很多程序就是以Service形式启动的。
3.1: 创建Service的方法:
A: 在/etc/init.d/目录下,创建要启动的脚本。例如名为:beacool_rfkill 这个脚本用来启动 bluetooth.
内容如下:
rfkill unblock bluetooth
B: 把脚本增加入Service:
$ cd /etc/init.d
$ sudo update-rc.d beacool_rfkill defaults 95
此时,会把脚本beacool_rfkill 加入到/etc/rcX.d/目录中。X:0-6, 分别表示不同的启动级别。3为字符界面启动,5为GUI启动。其它不关键。
脚本名则在/etc/rc3.d/中变为:S95beacool_rfkill
命令中,最后的数字表示表示启动顺序。
C: 如果想要去掉此Service:
$ cd /etc/init.d
$ sudo update-rc.d -f beacool_rfkill remove
3.2: ROS程序使用Service方式启动:
为了查看脚本是否有效,可以查看log. Sam在脚本中作了如下动作:
roslaunch beacool_nav amcl_demo.launch >> /home/ubuntu/catkin_ws/src/beacool.log 2>&1
这样,就会把log 发送到指定目录。
Log如下:
/etc/rc2.d/S96dashgo_launch: 1: /etc/rc2.d/S96dashgo_launch: roslaunch: not found
这说明 ros没加入环境变量中。需要先把环境变量设置好。
可参见后面的写法:
. /opt/ros/indigo/setup.sh
. /home/ubuntu/catkin_ws/devel/setup.sh
roslaunch beacool_bringup minimal.launch
此办法有个缺点:
如果有多个ROS工程要加入,例如:其中一个加为S98, 另一个加为S99。则S98会被执行。而S99并未执行。
虽然也可以后台执行,但会导致前一个退出。
所以如果一定要采用此方法:
可以把多个Launch合并。(并不建议)
4. 简单暴力的 rc.local (问题较多的方法):
/etc/rcX.d/中,都包含了/etc/init.d/rc.local. 通常都是最后一刻加入的,例如:S99rc.local
而它又引用了 /etc/rc.local
所以,可以简单的在/etc/rc.local 的exit 0 之前加入调用。
例如:想要加入一个ROS项目:beacool_bringup 的minimal.launch.
A: 先创建一个script:
. /opt/ros/indigo/setup.sh
. /home/ubuntu/catkin_ws/devel/setup.sh
roslaunch beacool_bringup minimal.launch
请注意:此时并没有使用source /opt/ros/indigo/setup.bash.
而是采用 . /opt/ros/indigo/setup.sh
是因为此时bash还未启动,而source是bash内部命令。此时找不到source.
B: 修改其权限:
sudo chmod 777 beacool_launch
C: 加入rc.local:
/etc/init.d/beacool_launch
此办法有个和方法3类似的缺点:
1. 加入后,如果ROS 程序不退出,则阻塞在这里。这意味着如果要启动多个launch. 则下一个不会被执行。
2. 当然有朋友会说,可以后台执行嘛。
/etc/init.d/beacool_launch &
但如果后面再启一个launch, 前面beacool_launch所启动的ROS项目会退出。
所以如果一定要采用此方法:
可以把多个Launch合并。(并不建议)
设置了程序自启动之后,需要把Ubuntu的开机密码取消掉,这样就不需要人为登录,设置方法
4000
参考如下:
https://jingyan.baidu.com/article/0320e2c1d4da0b1b87507b31.html

相关文章推荐
- ros 程序开机自启动
- ubuntu 实现开机自启动程序
- 找出在MSCONFIG中看不到的开机自启动程序
- Android 开机自启动示例程序
- C#中实现程序开机自启动
- WinCE程序开机自启动
- Android 广播(Broadcast)程序开机自启动
- MAC如何删除开机自启动程序
- 深入理解linux下rc.d/目录文件以及程序开机自启动
- CentOS设置程序开机自启动的方法
- CentOS设置程序开机自启动的方法
- Android 开机自启动程序的实现
- CentOS设置程序开机自启动的方法
- Android程序开机自启动的实现方式
- linux程序开机自启动顺序
- ROS 系统上电程序自启动
- Android 5.1开机自启动示例程序(Activity,APP包启动)
- CentOS设置程序开机自启动的方法
- vc++ 程序开机自启动和取消启动
- 转:CentOS设置程序开机自启动的方法