凸优化中的基本概念
2017-10-24 20:15
344 查看
1.1 什么是凸集?
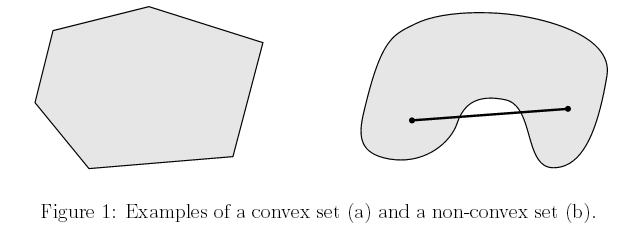
简单来说, 凸集是一个点集, 这个点集有一个性质, 就是在这个集合中任取不同的两个点x和y, 他们之间的线段(包括端点)上的点都属于这个点集,那么就说这个点集是一个凸集。比如下图中左边的图形是凸集,而右边不是,因为我们可以找到两个点,使它们之间的线段上的点不在集合中
数学上,凸集的定义如下:
给定集合

C,





∀x,y∈C,




0≤θ≤1,如果有




θx+(1−θy)∈C
我们就称集合C是凸集,我们把点
θx+(1−θy)称为x和y的凸组合。
1.2 什么是凸函数?
假设有一个函数





f:Rn→R,记其定义域为

D(f),如果
D(f)是凸集,且在其中任取两个点
x,y,满足以下性质:
f(θx+(1−θy))≤θf(x)+(1−θ)f(y)
那么就称
f为凸函数。
注意:定义域是凸集这个要求不是必须的,其出发点只是为了使x,y的凸组合有定义
关于凸函数,直观上可以用下图来加深理解:
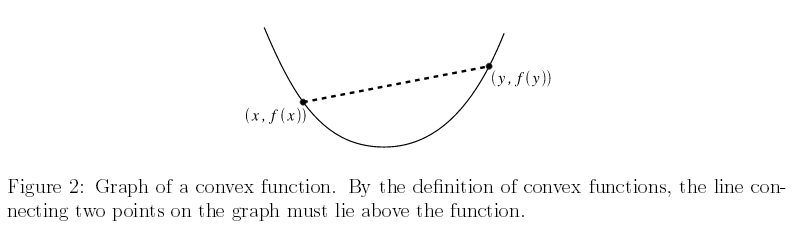
简单来说,我们在定义域任取两个点x,y, 连接他们得到一条线段,如果这个线段上的点都位于对应函数值上方,我们就说该函数是一个凸函数。
更进一步,如果

x≠y且

0<θ<1我们称
f是严格凸的。如果
−f是凸函数,那么
f就是凹函数。如果
−f是严格凸函数,那么
f就是严格凹函数。
1.3 凸函数的等价判别方法
上面我们讲了什么是凸函数,然而这个定义在现实中很难用于判断一个函数是不是凸的,因此介绍几个等价的定义。
1.3.1 一阶近似
假设函数
f:Rn→R是可导函数(也就是说
f(x)的梯度


∇xf(x)在整个定义域上都存在),则
f是凸函数当且仅当
其定义域是凸集,且对于所有的
x,y∈D(f)有下式成立:


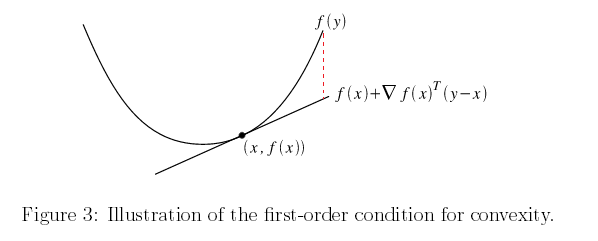
f(y)≥f(x)+∇xf(x)T(y−x)
我们将
f(x)+∇xf(x)T(y−x)叫做对f的一阶近似,其物理意义实际上是经过点x的切平面,我们用这个切平面上的点来近似
f(y)。这个公式的含义是:如果f是凸函数,那么它的一阶近似值始终位于函数值的下方。
1.3.2 二阶近似
假设函数
f:Rn→R二阶可导(即海塞矩阵在定义域上都有定义),则f是凸函数当且仅当
其定义域是凸集且其海塞矩阵半正定,即:


∇x2f(x)⪰0
可能有些同学忘了海塞矩阵长什么样了,这里提一下。假设我们的变量来自n维空间,即
x∈Rn,我们记







x=(x1,x2,...,xn)={xi}i=1n,即由n个变量组成的向量。那么海塞矩阵(记为H吧)是一个


n×n的方块矩阵,且



Hij=∂2f(x)∂xi∂xj
也就是说,
Hij是f(x)分别对
xi和
xj进行求导两次得到的。
1.4 凸优化问题
上面已经介绍了凸集和凸函数,是时候到凸优化了吧? 别急,在介绍凸优化概念之前再啰嗦两句。
1.4.1 水平子集(sublevel sets)
由凸函数的概念出发,我们可以引出水平子集(sublevel set)的概念。假定f(x)是一个凸函数, 给定一个实数

α∈R,我们把集合

{x∈D(f)|f(x)≤α}
叫做
α−水平子集。
也就是说
α水平子集是所有满足
f(x)≤α的点构成的集合。利用凸函数性质,我们可以证明水平子集也是凸集:
f(θx+(1−θy))≤θf(x)+(1−θ)f(y)≤θα+(1−θ)α=α
水平子集告诉我们,给凸函数添加一个上限,定义域内剩下的点构成的点集还是一个凸集。
1.4.2 仿射函数(affine functions)
数学上,我们把形如



h(x)=Ax+b
的函数叫做仿射函数。其中,


An×m,一个向量
b∈Rm。直观上理解,仿射函数将一个n维空间的向量通过线性变换A映射到m维空间,并在其基础上加上向量b,进行了平移。
同理,我们可以证明,点集
{x∈D(h)|h(x)=0}
是一个凸集,证明略。
1.4.3 凸优化(convex optimization)
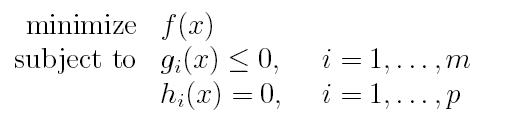
那么回到凸优化问题上来, 什么是一个凸优化问题?
一个凸优化问题可以定义为:
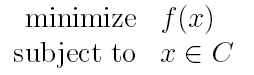
其中f是一个凸函数,C是一个凸集。根据先前介绍过的水平子集等概念,上面问题又可以等价写为:
其中,g(x)是凸函数,h(x)是仿射函数。 也就是说,原约束集C被我们表示为一系列凸集的交集(数学上可以证明,凸集的交集还是凸集)。
1.4.4 局部最优(local optima)和全局最优(global optima)
局部最优:周围小范围 内没有比我小的点。
数学定义:
如果存在


R>0,对于所有的z:


∥x−z∥2<R,有
f(x)≤f(z),那么就称x是一个局部最优点。
全局最优:我就是整个定义域中的最小的点。
数学定义:
如果对于定义域内的所有z,有
f(x)≤f(z),则称x是全局最优。
现在回到凸优化问题上, 对于凸优化问题,有一个很重要的结论:
对于凸函数来讲, 局部最优就是全局最优。证明如下:
我们用反证法证明。设
x是一个局部最优,但不是全局最优,于是我们假设全局最优是

z∗,那么我们有
f(x)>f(z∗)
由x的局部最优性质,我们有 :
存在
R>0,对于所有的z:
∥x−z∥2<R,有
f(x)≤f(z)
我们考虑
x和
z∗的凸组合:
z=θx+(1−θ)z∗,无论
z∗在哪里,我们总可以找到一个
θ,使得
z位于
x的邻域内,使得
f(x)≤f(z)
另一方面,由凸函数性质,我们有:
f(z)=f(θx+(1−θ)z∗)≤θf(x)+(1−θ)f(z∗)<θf(x)+(1−θ)f(x)=f(x)
由此得
f(z)<f(x),这与
f(x)≤f(z)矛盾,
于是我们证明了如果
x是局部最优,那么同时它也是全局最优。
1.5 常见凸优化问题
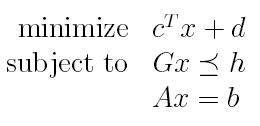
线性规划
如果
f和

gi都是仿射函数,则凸优化问题变为了线性规划问题:
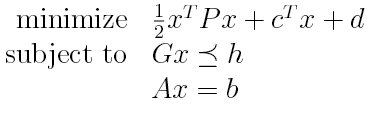
二次规划
线性规划中,如果
f变为一个凸二次函数,则凸优化问题变为二次规划:
二次约束二次规划
f和
gi都是凸二次函数

半定规划
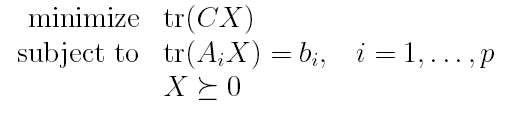
其中,


X∈Sn是一个n维对称方阵,并且我们将它约束为半正定矩阵。
C,Ai都是对称矩阵。这和前面的问题有点不太相同,前面是优化一个向量,而这里是优化一个矩阵。

相关文章推荐
- Mali GPU OpenGL ES 应用性能优化--基本概念
- 二,mysql优化——sql优化基本概念
- Android 性能优化 基本概念
- 一篇文章讲透CDN HTTPS安全加速基本概念、解决方案及优化实践
- 网站优化各类基本名词概念
- Mali GPU OpenGL ES 应用性能优化--基本概念
- Mali GPU OpenGL ES 应用性能优化--基本概念
- SQL优化:基本概念(索引调优、统计信息、查询调整、资源调控)
- 1.Oracle性能优化的基本概念和原理
- 一篇文章讲透CDN HTTPS安全加速基本概念、解决方案及优化实践
- Unity 性能优化 系列(一)基本概念
- sql优化基本概念
- CDN HTTPS安全加速基本概念、解决方案及优化实践
- 凸优化中的基本概念
- jvm内存管理机制和调优总结(从基本概念 到 深度优化)
- oracle数据库优化--基本概念
- MySQL性能优化基本概念
- 【直观梳理深度学习关键概念】优化算法、调参基本思路、正则化方式等
- 网站优化基本概念