使用QT调试ROS工程
2017-10-11 14:49
225 查看
配置qt环境,调试ros工程
1. 向Qt Creator里添加工程
从 Dash home 里启动Qt Creator,将看到下面的Welcome界面:
这里我们导入 dgps_ros 包,使之成为Qt Creator的C++工程。点击 Open Project 按钮,在弹出的对话框中选择 /home/ros/ros-project/dgps/src/dgps_ros/路径下的 CMakeLists.txt 文件,如下图:
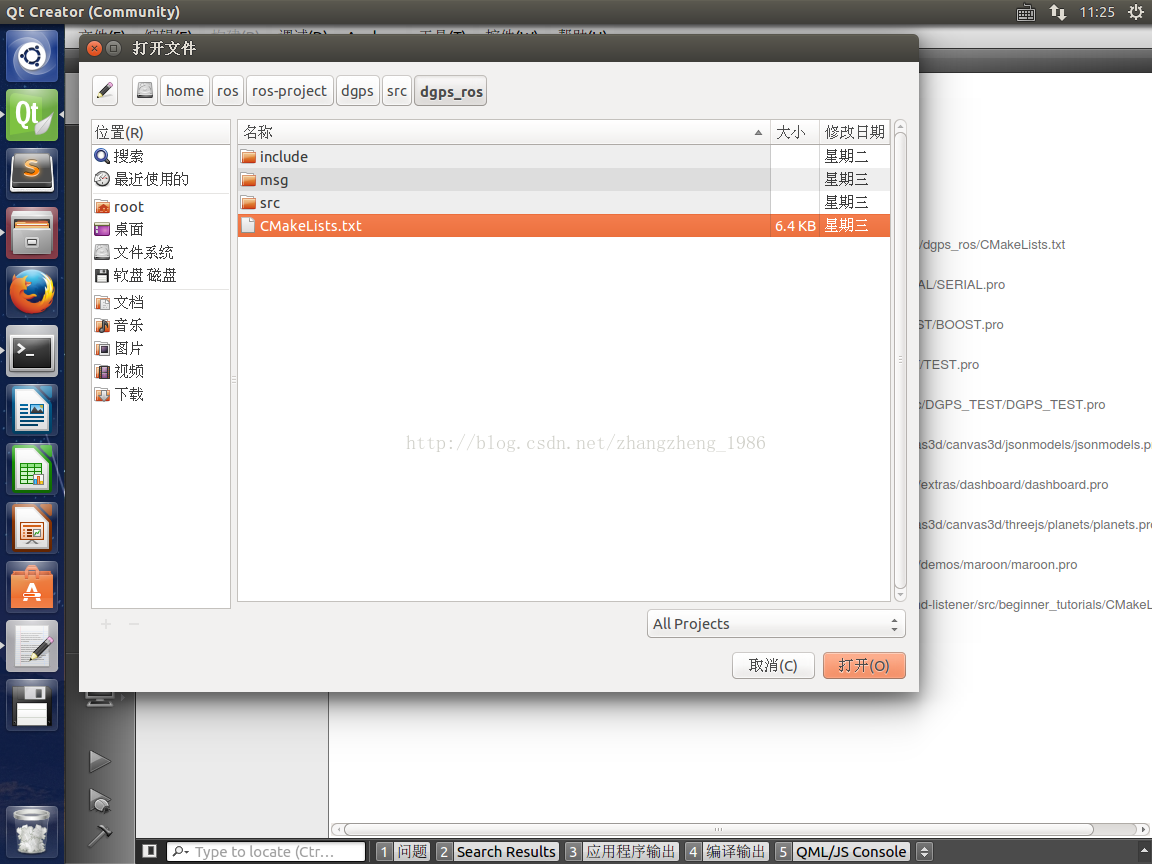
点击 Open,将会出现编译路径选择对话框。这里要注意了,需要 Browse 将路径修改为 dgps/src/build/ 的路径,如下图:
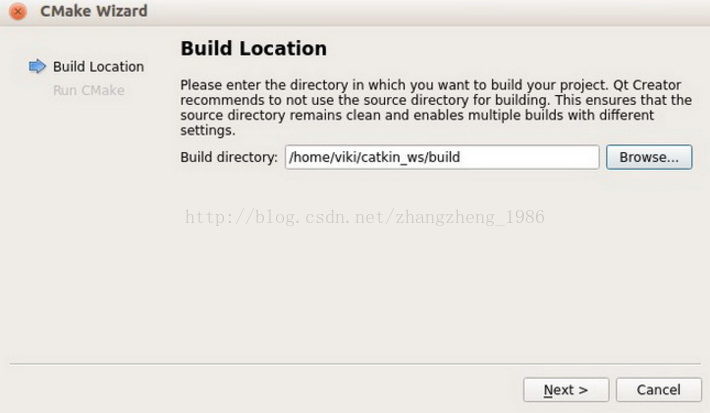
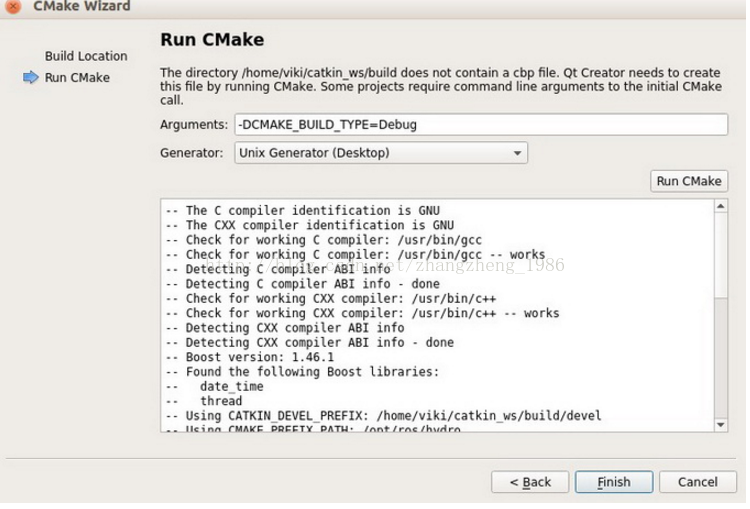
点击 Next 后,在出现的对话框的 Arguments 一栏填入 -DCMAKE_BUILD_TYPE=Debug (不填后面将无法调试),然后点击 Run CMake 即可开始编译,结果如下图:
2.修改Qt Creator快捷方式,使从快捷方式启动Qt Creator的同时加载ROS环境变量
打开terminal,输入下面的命令:
[root@positec:/]gedit /usr/share/applications/DigiaQtOpenSource-qtcreator.desktop
[Desktop Entry]
Type=Application
Exec=bash -i -c /opt/Qt/Tools/QtCreator/bin/qtcreator
Name=Qt Creator (Community)
GenericName=The IDE of choice for Qt development.
Icon=QtProject-qtcreator
Terminal=false
Categories=Development;IDE;Qt;
MimeType=text/x-c++src;text/x-c++hdr;text/x-xsrc;application/x-designer;application/vnd.qt.qmakeprofile;application/vnd.qt.xml.resource;text/x-qml;text/x-qt.qml;text/x-qt.qbs;
添加 bash -i -c 是为了在通过快捷方式启动Qt Creator的同时加载ROS环境变量(ROS环境变量加载脚本配置在 ~/.bashrc 文件内)
3.调试
先打开一个terminal,输入 roscore 命令启动ROS Master。然后打开QT工程,设置一个断点,启动调试。
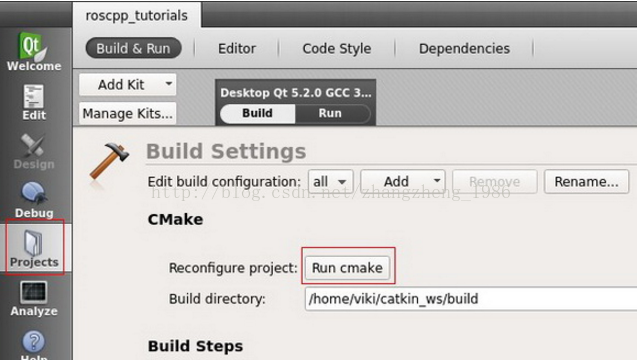
如果之前在CMake的时候没有填写 -DCMAKE_BUILD_TYPE=Debug 参数,则编译出来的程序不可用于调试。按下调试快捷键 F5 的时候,可能会出现警告信息
可以通过左边的"Projects"->"Run CMake"重新设置参数,并make,如下图:
1. 向Qt Creator里添加工程
从 Dash home 里启动Qt Creator,将看到下面的Welcome界面:
这里我们导入 dgps_ros 包,使之成为Qt Creator的C++工程。点击 Open Project 按钮,在弹出的对话框中选择 /home/ros/ros-project/dgps/src/dgps_ros/路径下的 CMakeLists.txt 文件,如下图:
点击 Open,将会出现编译路径选择对话框。这里要注意了,需要 Browse 将路径修改为 dgps/src/build/ 的路径,如下图:
点击 Next 后,在出现的对话框的 Arguments 一栏填入 -DCMAKE_BUILD_TYPE=Debug (不填后面将无法调试),然后点击 Run CMake 即可开始编译,结果如下图:
2.修改Qt Creator快捷方式,使从快捷方式启动Qt Creator的同时加载ROS环境变量
打开terminal,输入下面的命令:
[root@positec:/]gedit /usr/share/applications/DigiaQtOpenSource-qtcreator.desktop
[Desktop Entry]
Type=Application
Exec=bash -i -c /opt/Qt/Tools/QtCreator/bin/qtcreator
Name=Qt Creator (Community)
GenericName=The IDE of choice for Qt development.
Icon=QtProject-qtcreator
Terminal=false
Categories=Development;IDE;Qt;
MimeType=text/x-c++src;text/x-c++hdr;text/x-xsrc;application/x-designer;application/vnd.qt.qmakeprofile;application/vnd.qt.xml.resource;text/x-qml;text/x-qt.qml;text/x-qt.qbs;
添加 bash -i -c 是为了在通过快捷方式启动Qt Creator的同时加载ROS环境变量(ROS环境变量加载脚本配置在 ~/.bashrc 文件内)
3.调试
先打开一个terminal,输入 roscore 命令启动ROS Master。然后打开QT工程,设置一个断点,启动调试。
如果之前在CMake的时候没有填写 -DCMAKE_BUILD_TYPE=Debug 参数,则编译出来的程序不可用于调试。按下调试快捷键 F5 的时候,可能会出现警告信息
可以通过左边的"Projects"->"Run CMake"重新设置参数,并make,如下图:

相关文章推荐
- QT 调试ROS 但是打开工程出现错误,找不到roscpp.cmake之类
- QT使用ROS自带的opencv新建使用OPENCV的QT工程(None ROS)
- Qt 使用vs调试的方法
- Cmake编译OpenCV和如何在VS工程中配置来使用编译后的OpenCV进行跟踪调试问题
- QT5.7中使用OpenGL开发记录(一)---- 第一个工程
- android开发,关于工程无法使用真机调试。
- cocos2dx(3.9)工程项目,使用android studio打包并调试
- QT基础(五)QT工程pro文件模板变量 使用
- Myeclipse中maven工程使用jetty插件启动jetty服务器调试
- Qt工程使用VLD检测内存泄露
- qt5.3.2在ros(机器人操作系统)中的使用:qmake与cmake(qt5.4.0不适用)
- QT:无法找到调试信息,或者调试信息不匹配,未使用调试信息”生成二进制文件,是否继续调试
- Qt中使用的工程文件(.pro文件)
- 使用eclipse CDT 调试cocos2d-x 3.3 android 工程
- QT工程中使用图片的三种方法
- ROS_Kinetic_15 ROS使用Qt
- 使用qt和cmakelists进行debug调试
- QT使用GDB调试开发板
- Qt 使用#define+qDebug()输出调试信息