张高兴的 Windows 10 IoT 开发笔记:使用 Lightning 中的软件 PWM 驱动 RGB LED
2017-10-06 22:41
861 查看
感觉又帮 Windows 10 IoT 开荒了,所以呢,正儿八经的写篇博客吧。其实大概半年前就想写的,那时候想做个基于 Windows 10 IoT 的小车,但树莓派原生不支持 PWM 啊。百度也搜不到,上 GitHub 转了一圈,在 @ms-iot 那发现了 Lightning ,再看最后的更新时间,还是2016中旬……Windows 10 IoT 在国内真惨,这么长时间都没人写个教程……不说废话了……
本文示例地址:https://github.com/ZhangGaoxing/windows-iot-demo/tree/master/RgbLed
Lightning 项目地址:https://github.com/ms-iot/lightning
效果图:
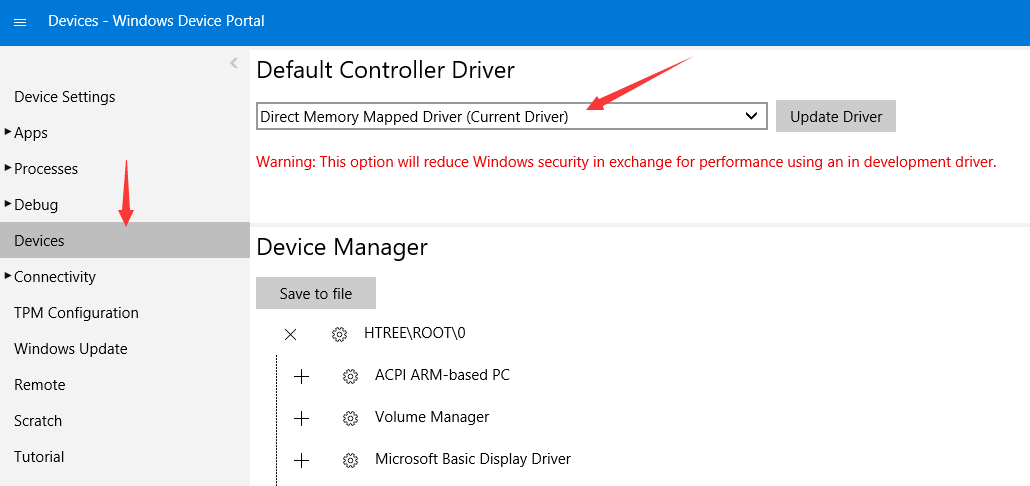
一、 更改默认控制器驱动
打开树莓派的 Windows Device Portal ,在 Devices 菜单中的 Default Controller Driver 选项,将默认的 Inbox Driver 更改为 Direct Memory Mapped Driver ,重启。
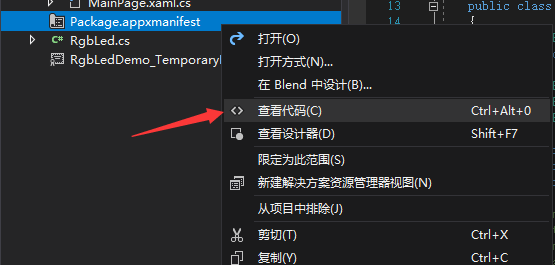
二、更改 Package.appxmanifest 配置
新建一个 UWP 项目,本文这里叫“RgbLedDemo”。以“查看代码”的形式打开 Package.appxmanifest 。
在 Package 标签下添加一个命名空间,并更改 IgnorableNamespaces 属性。
在 Capabilities 添加如下内容
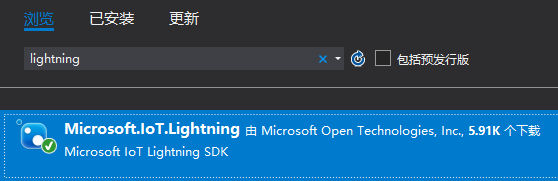
三、引用 Microsoft.Iot.Lightning
在 NuGet 包管理器下搜索 Lightning 即可。
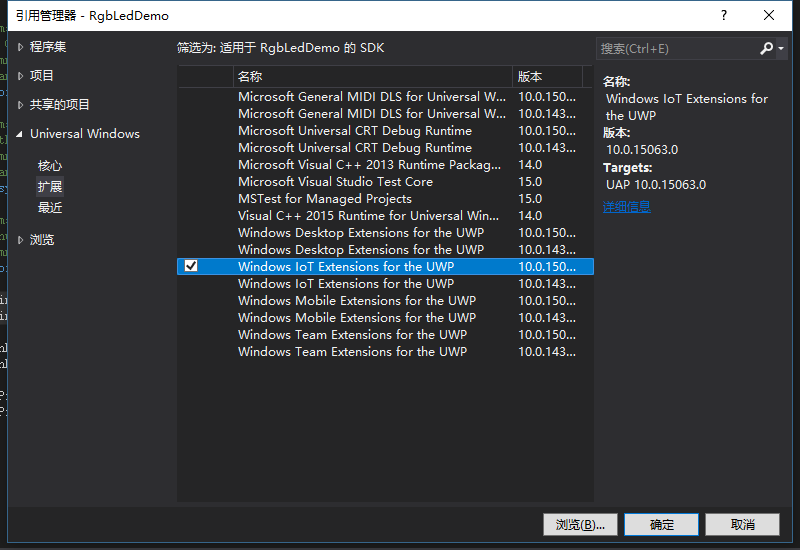
还有 Windows IoT Extensions for the UWP
四、使用 Lightning
注意引用
1. 判断 Lightning 的启用
这一步是必要的,因为使用 Lightning 必须关闭系统默认的控制器驱动,没启用的话抛出个异常就好了。
2. 获取软件 PWM 控制器
一切正常的情况下就该获取 Lightning 中的软件 PWM 控制器了。Lightning 中也集成了其他硬件 PWM 的控制器,因此在调用 PwmController.GetControllersAsync() 时返回的是一个集合,其中第二项是我们需要的软件 PWM 控制器。得到控制器后还需要设置 PWM 的频率,这个软件 PWM 控制器的频率范围在 40 - 1000 Hz 之间(低的可怜……),不在这个范围内的数字会抛出异常。
3. 设置 PWM 引脚
以 Red 引脚为例。首先通过控制器来打开引脚,这里为 GPIO 17 位置的引脚。然后需要设置 Duty Cycle Percentage ,通俗点就是电压的占比,0 - 1 之间的小数。
之后要改变 LED 的亮度还是要改变 SetActiveDutyCyclePercentage(value) 的 value 值。
释放的话要先关闭 PWM。
五、注意
使用 Lightning 后,之前基于默认控制器驱动编写的I2C,SPI代码会报错。但 Lightning 中集成了 I2C、SPI、GPIO 等的控制器,将其替换一下即可。
本文的项目解析部分就结束了。下面给一个呼吸灯的测试代码,我用的是共阴极 RGB LED 。代码在 GitHub 的项目中有。
本文示例地址:https://github.com/ZhangGaoxing/windows-iot-demo/tree/master/RgbLed
Lightning 项目地址:https://github.com/ms-iot/lightning
效果图:
一、 更改默认控制器驱动
打开树莓派的 Windows Device Portal ,在 Devices 菜单中的 Default Controller Driver 选项,将默认的 Inbox Driver 更改为 Direct Memory Mapped Driver ,重启。
二、更改 Package.appxmanifest 配置
新建一个 UWP 项目,本文这里叫“RgbLedDemo”。以“查看代码”的形式打开 Package.appxmanifest 。
在 Package 标签下添加一个命名空间,并更改 IgnorableNamespaces 属性。
xmlns:iot="http://schemas.microsoft.com/appx/manifest/iot/windows10" IgnorableNamespaces="uap mp iot"
在 Capabilities 添加如下内容
<iot:Capability Name="lowLevelDevices" /> <DeviceCapability Name="109b86ad-f53d-4b76-aa5f-821e2ddf2141"/>
三、引用 Microsoft.Iot.Lightning
在 NuGet 包管理器下搜索 Lightning 即可。
还有 Windows IoT Extensions for the UWP
四、使用 Lightning
注意引用
using Windows.Devices.Pwm; using Microsoft.IoT.Lightning.Providers;
1. 判断 Lightning 的启用
这一步是必要的,因为使用 Lightning 必须关闭系统默认的控制器驱动,没启用的话抛出个异常就好了。
if (!LightningProvider.IsLightningEnabled)
{
throw new NullReferenceException("Lightning isn't enabled !");
}2. 获取软件 PWM 控制器
一切正常的情况下就该获取 Lightning 中的软件 PWM 控制器了。Lightning 中也集成了其他硬件 PWM 的控制器,因此在调用 PwmController.GetControllersAsync() 时返回的是一个集合,其中第二项是我们需要的软件 PWM 控制器。得到控制器后还需要设置 PWM 的频率,这个软件 PWM 控制器的频率范围在 40 - 1000 Hz 之间(低的可怜……),不在这个范围内的数字会抛出异常。
PwmController controller = (await PwmController.GetControllersAsync(LightningPwmProvider.GetPwmProvider()))[1]; controller.SetDesiredFrequency(1000);
3. 设置 PWM 引脚
以 Red 引脚为例。首先通过控制器来打开引脚,这里为 GPIO 17 位置的引脚。然后需要设置 Duty Cycle Percentage ,通俗点就是电压的占比,0 - 1 之间的小数。
PwmPin redPin = controller.OpenPin(17); redPin.SetActiveDutyCyclePercentage(0); redPin.Start();
之后要改变 LED 的亮度还是要改变 SetActiveDutyCyclePercentage(value) 的 value 值。
释放的话要先关闭 PWM。
redPin.Stop(); redPin.Dispose();
五、注意
使用 Lightning 后,之前基于默认控制器驱动编写的I2C,SPI代码会报错。但 Lightning 中集成了 I2C、SPI、GPIO 等的控制器,将其替换一下即可。
本文的项目解析部分就结束了。下面给一个呼吸灯的测试代码,我用的是共阴极 RGB LED 。代码在 GitHub 的项目中有。
/// <summary>
/// Breathing LED
/// </summary>
/// <param name="delay">Delay Time</param>
public async Task BreathingAsync(int delay)
{
double red = 255;
double green = 0;
double blue = 0;
while (red != 0 && green != 255)
{
redPin.SetActiveDutyCyclePercentage(red / 255.0);
greenPin.SetActiveDutyCyclePercentage(green / 255.0);
red--;
green++;
await Task.Delay(delay);
}
while (green != 0 && blue != 255)
{
greenPin.SetActiveDutyCyclePercentage(green / 255.0);
bluePin.SetActiveDutyCyclePercentage(blue / 255.0);
green--;
blue++;
await Task.Delay(delay);
}
while (blue != 0 && red != 255)
{
bluePin.SetActiveDutyCyclePercentage(blue / 255.0);
redPin.SetActiveDutyCyclePercentage(red / 255.0);
blue--;
red++;
await Task.Delay(delay);
}
}

相关文章推荐
- 张高兴的 Windows 10 IoT 开发笔记:使用 MAX7219 驱动 8×8 点阵
- 张高兴的 Windows 10 IoT 开发笔记:使用 MAX7219 驱动 8×8 点阵
- 张高兴的 Windows 10 IoT 开发笔记:使用 ADS1115 读取模拟信号
- 张高兴的 Windows 10 IoT 开发笔记:使用 ULN2003A 控制步进电机
- 张高兴的 Windows 10 IoT 开发笔记:使用 ULN2003A 控制步进电机
- 张高兴的 Windows 10 IoT 开发笔记:使用 ADS1115 读取模拟信号
- 张高兴的 Windows 10 IoT 开发笔记:使用 MAX7219 驱动数码管
- 张高兴的 Windows 10 IoT 开发笔记:ADXL345 加速度传感器
- 张高兴的 Windows 10 IoT 开发笔记:三轴数字罗盘 HMC5883L
- 张高兴的 Windows 10 IoT 开发笔记:HC-SR04 超声波测距模块
- 张高兴的 Windows 10 IoT 开发笔记:0.96 寸 I2C OLED
- 张高兴的 Windows 10 IoT 开发笔记:DHT11 温湿度传感器
- 张高兴的 Windows 10 IoT 开发笔记:BH1750FVI 光照度传感器
- 张高兴的 Windows 10 IoT 开发笔记:部署 ASP.NET Core 2 应用
- 张高兴的 Windows 10 IoT 开发笔记:ADXL345 加速度传感器
- 张高兴的 Windows 10 IoT 开发笔记:红外温度传感器 MLX90614
- 张高兴的 Windows 10 IoT 开发笔记:RTC 时钟模块 DS3231
- 张高兴的 Windows 10 IoT 开发笔记:BMP180 气压传感器
- 张高兴的 Windows 10 IoT 开发笔记:RTC 时钟模块 DS3231
- 张高兴的 Windows 10 IoT 开发笔记:BH1750FVI 光照度传感器