简单的ros源码分析
2017-09-30 23:51
260 查看
写在前面
很久就有写ROS源码分析的想法。2014年最初接触ROS,当时中文资料比较少,基本只有一本红皮的ROS介绍,内容大多是对ROS官方wiki的翻译,版本也跟不上ROS官方发布的速度。因此开始刷官方wiki教程。官方教程简单形象,原理与例子结合,至今我仍然认为是入门ROS的不二之选。刷完教程后,出于工作需要(主要在ROS实时性方面),开始阅读ROS的核心代码。ROS的代码量并不大,结构也比较清楚,虽然可以用来参考学习的资料完全没有,并且本人也非计算机专业出身,C++功底并不深,但结合实际使用效果勉强啃得动。当时觉得如果有个参考的资料,讲讲每个文件是干什么,每个函数是什么功能,那学习起来就方便多了。但是并没有。
如今两年过去了,机器人行业越来越火,ROS也逐渐成为机器人软件平台的事实标准,但依然没有人对ROS的源码进行分析。仔细想想,这种状况也算是正常的,毕竟使用ROS的人一般只关注ROS带来的简单的接口、丰富的调测试工具、多语言多平台的支持以及海量开源代码包,而对于ROS到底如何实现这些并不关心。同时ROS当前的主要受众还是学术界,更强调新研究、新算法的快速部署,对调度、通信的性能并不特别关注。而国外的ROS的开发者和维护者本身对ROS特别熟悉,没有必要专门花心思在介绍ROS内部的实现机制上。
那么分析ROS的源码到底有没有用呢?如果你是一个ROS的使用者,只是用ROS的包进行学术研究和算法验证,那么分析ROS源码的用处并不大。分析ROS源码能够让你更清楚ROS的用法,在出现某些错误时能够更快速的定位问题,但也仅此而已。对于你的目标,分析源码带来的收益与付出的时间是不符的。
不过我相信,在进行ROS学习的过程中,总有人有好奇心,想要知道ROS到底是如何封装node的?是如何实现topic的?是如何收发message的?或者有人像我一样,想知道为什么ROS不能保证消息传输的实时性?在存在大量节点时通信的瓶颈在哪?
要想知道这些问题,就需要对ROS的源码进行分析。
从今天开始,希望以后每个工作日都能有更新,把我在阅读ROS源码获得的一些经验和大家分享。一是对知识的总结和归纳,二是与其他高手交流,最后也希望能够为刚刚接触ROS的朋友提供一点帮助。
首先,从文件结构开始。
文件结构
从Groovy版本开始,ROS正式引入全新的编译工具catkin。同时被抛弃的还有“stack”的概念。我接触ROS也是在这个时间点上,因此对之前的ROS文件结构了解的也不是很深。 从引入catkin开始,ROS的文件结构没有发生大的变化。由于ROS内核源码也是以同样的结构组织,因此在此进行一点简单说明。
对于任何一个ROS package,其文件结构如下:
package_name
include
file.h
src
file.cpp
msg(optional)
MyMessage.msg
srv(optional)
MyService.srv
launch(optional)
MyLaunch.launch
CMakeList.txt
package.xml
编译工具catkin是基于CMake实现的,因此主要的编译选项在CMakeList.txt中进行配置。CMakeList.txt的语法与CMake完全一致,只不过增加了一些用于catkin和ROS的语句。
package.xml是用来指示编译和运行时所依赖的其它软件包,同时保存本软件包的描述信息。
在我们编写ROS程序时,必须依赖roscpp和/或rospy两个代码包,这两个包均在ros_comm元包(meta package)中,github地址
对ROS源码的分析从roscpp开始,整个代码树结构如下图:
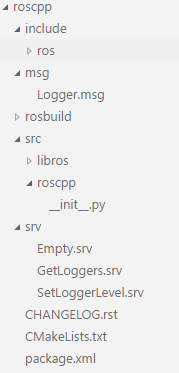
这里面,msg目录下是一个log消息文件,srv目录下是三个服务文件,后两个可以用于在运行时动态改变log打印级别,后面代码涉及到时会在详细说明。大部分代码分布在include/ros和src/libros两个目录下,这和我们常见的项目代码组织形式比较一致。
后面的大部分分析工作主要在这两个目录下进行。

相关文章推荐
- (转)网上流传的天龙源码框架分析之一 --- 客户端简单介绍
- 天天记录 - Android refreshDrawableState源码及流程简单分析
- dagger2的生成源码简单分析
- MKNetworkKit入门和简单使用及其源码实例分析
- Android SwipeRefreshLayout下拉刷新控件源码简单分析
- ros源码分析(6)—roslaunch Commandline Tools
- 简单分析Android中添加shortcut方面的源码
- SPServer源码分析(三): 简单的ECHO服务器
- 天天记录 - Android setVisibility参数VISIBLE, GONE, INVISIBLE与源码简单分析
- Android属性动画ValueAnimator源码简单分析
- Activity的绘制流程简单分析(基于android 4.0源码进行分析)
- springmvc源码分析原理及简单实现
- 简单入门java多线程<一>:源码分析Thread和Runnable
- Fresco源码简单分析 DraweeView DraweeHierarchy DraweeController
- VMC源码的简单分析
- Rome使用简单说明二(部分关键源码分析)
- hadoop 2.7.3 源码分析超简单源码修改测试
- Okhttp源码简单分析(完善ing)
- AR引擎vuforia源码分析、中文注释(2)用手势控制来与模型简单交互
- [Mybatis] TypeHandler的简单应用及源码分析