基于tiny4412的Linux内核移植 -- PWM子系统学习
2017-09-26 15:44
344 查看
转载地址:http://www.cnblogs.com/pengdonglin137/p/5171275.html
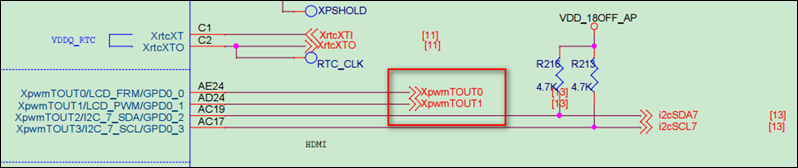
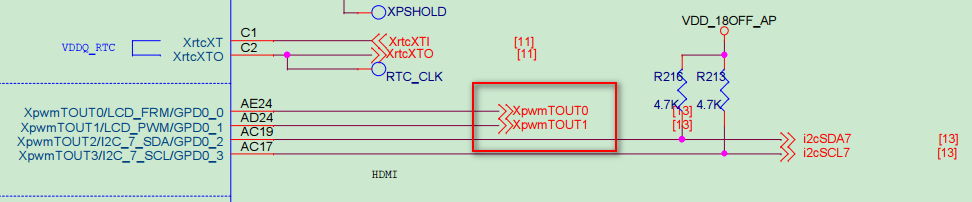
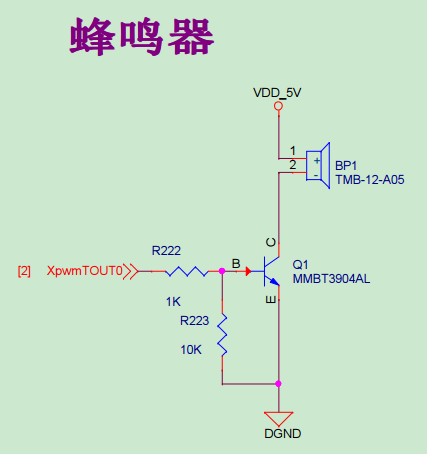
Exynos4412一共可以输出4路PWM(timer0、timer1、timer2、timer3产生的PWM有对应的输出引脚,timer4没有对应的引脚),但是在tiny4412上只有两路PWM引出供片外外设使用,分别来自timer0和timer1,其中timer0输出的PWM0用于控制底板上的有源蜂鸣器(TMB12A05),timer1产生的PWM1用于控制LCD的背光亮度。
核心板:
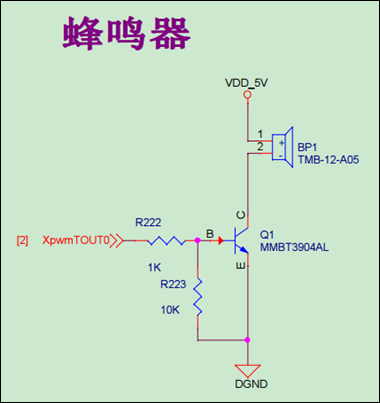
底板(有源蜂鸣器):
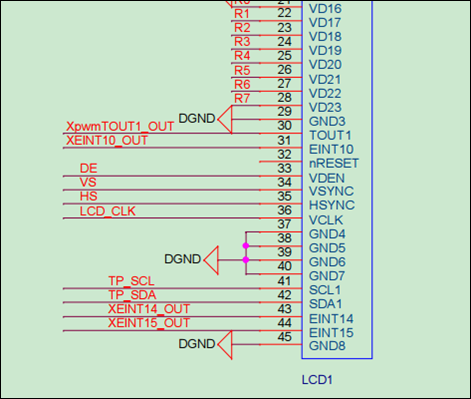
底板(LCD背光):
下面我们以用PWM控制蜂鸣器为例学习一下PWM子系统和backlight子系统。
回到顶部(go to top)
对应的驱动文件:drivers/pwm/pwm-samsung.c
修改设备树文件 arch/arm/boot/dts/exynos4412-tiny4412.dts
其中 pinctrl-0后的参数是为了设置用到的gpio的复用功能,pwm0_out是在arch/arm/boot/dts/exynos4x12-pinctrl.dtsi中定义的:
意思是将gpiod0_0引脚设置的功能复用设置为2,2是什么意思呢?对于Samsung来说:

这里的2表示设置为TOUT_0,即PWM0的脉冲输出引脚。同理可以理解pwm1_out的意思。
samsung,pwm_outs后的参数表示只有PWM0和PWM1两路可以供板级外设使用,解析过程可以参考驱动程序。
其中pwm是在 arch/arm/boot/dts/exynos4.dtsi
回到顶部(go to top)
用新的设备树镜像启动内核
在/sys/class/pwm中有注册的pwmchip0,PWM0-3都对应这个pwmchip0,是调用pwmchip_add函数创建的。
npwm的意思是Exynos4412支持的pwm通道个数(在驱动里将这个值设置为了5,即将timer4也包含在内了)。蜂鸣器对应的的PWM0,所以我们向export中写入0,然后就会在当前目录下产生了一个名为pwm0的新目录,其中是设置PWM0参数的配置文件。
在pwm0目录下:
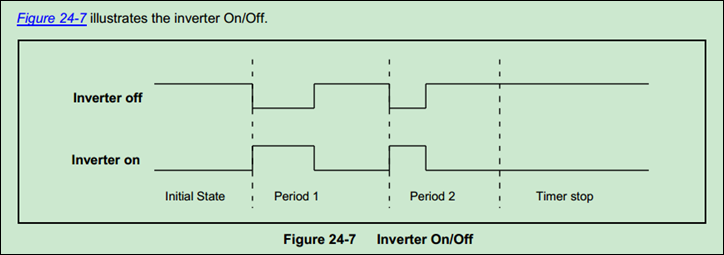
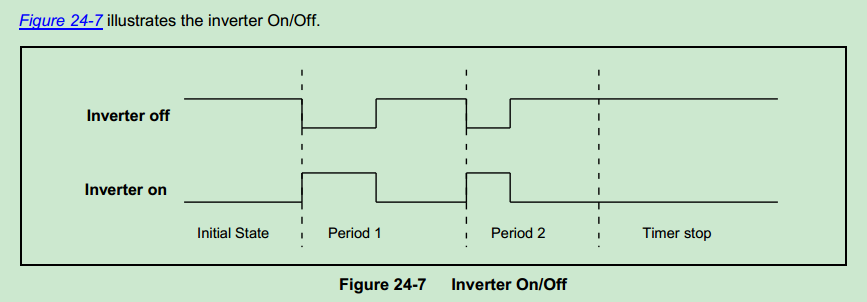
polarity:接受normal或inversed两个参数,表示TOUT_0电平翻转;在exynos4412的用户手册的第24节:
period:表示pwm波的周期(单位:纳秒);
duty_cycle:在normal模式下,表示一个周期内高电平持续的时间(单位:纳秒),所以duty_cycle <= period;在reversed模式下,表示一个周期中低电平持续的时间(单位:纳秒);
enable:向其中写入1表示启动pwm,写入0,表示关闭pwm;
更多详情请参考内核文档:Documentation/pwm.txt
下面分享一个判断tiny4412底板上的蜂鸣器是有源的还是无源的方法:
首先先关闭pwm,即向enable中写入0;然后向polarity中写入inversed,如果蜂鸣器开始响,那么就是有源蜂鸣器,否则就是无源蜂鸣器。原理是:关闭了pwm后,在normal下,TOUT_0输出低电平,在inversed模式下,TOUT_0输出高电平。(从tiny4412的原理图中看到,pwm输出高电平时,三极管导通,蜂鸣器开始响,有源蜂鸣器的特点是,只要给它一个高电平,就响,而无源的特点是,必须给脉冲才响)
下面实现一个频率为1Hz, 占空比为1:9的例子:
这里:1秒 = 1 000 000 000 纳秒
向unexport中写入0,pwm0目录会被自动删除。
未完待续。
Exynos4412一共可以输出4路PWM(timer0、timer1、timer2、timer3产生的PWM有对应的输出引脚,timer4没有对应的引脚),但是在tiny4412上只有两路PWM引出供片外外设使用,分别来自timer0和timer1,其中timer0输出的PWM0用于控制底板上的有源蜂鸣器(TMB12A05),timer1产生的PWM1用于控制LCD的背光亮度。
核心板:
底板(有源蜂鸣器):
底板(LCD背光):

下面我们以用PWM控制蜂鸣器为例学习一下PWM子系统和backlight子系统。
回到顶部(go to top)
实验一、用PWM控制板子上的蜂鸣器
对应的驱动文件:drivers/pwm/pwm-samsung.c
修改设备树文件 arch/arm/boot/dts/exynos4412-tiny4412.dts
1: diff --git a/arch/arm/boot/dts/exynos4412-tiny4412.dts b/arch/arm/boot/dts/exynos4412-tiny4412.dts
2: index 585cab7..0425200 100644
3: --- a/arch/arm/boot/dts/exynos4412-tiny4412.dts
4: +++ b/arch/arm/boot/dts/exynos4412-tiny4412.dts
5: @@ -123,6 +123,13 @@
6: cap-mmc-highspeed;
7: };
8:
9: +&pwm {10: + pinctrl-0 = <&pwm0_out &pwm1_out>;
11: + pinctrl-names = "default";
12: + samsung,pwm-outputs = <0>, <1>;
13: + status = "okay";
14: +};
15: +
16: &serial_0 {17: status = "okay";
18: };
其中 pinctrl-0后的参数是为了设置用到的gpio的复用功能,pwm0_out是在arch/arm/boot/dts/exynos4x12-pinctrl.dtsi中定义的:
1: pwm0_out: pwm0-out {2: samsung,pins = "gpd0-0";
3: samsung,pin-function = <2>;
4: samsung,pin-pud = <0>;
5: samsung,pin-drv = <0>;
6: };
意思是将gpiod0_0引脚设置的功能复用设置为2,2是什么意思呢?对于Samsung来说:

这里的2表示设置为TOUT_0,即PWM0的脉冲输出引脚。同理可以理解pwm1_out的意思。
samsung,pwm_outs后的参数表示只有PWM0和PWM1两路可以供板级外设使用,解析过程可以参考驱动程序。
其中pwm是在 arch/arm/boot/dts/exynos4.dtsi
1: pwm: pwm@139D0000 {2: compatible = "samsung,exynos4210-pwm";
3: reg = <0x139D0000 0x1000>;
4: interrupts = <0 37 0>, <0 38 0>, <0 39 0>, <0 40 0>, <0 41 0>;
5: clocks = <&clock CLK_PWM>;
6: clock-names = "timers";
7: #pwm-cells = <3>;
8: status = "disabled";
9: };
回到顶部(go to top)
测试
重新编译设备树:make dtbs
用新的设备树镜像启动内核
[root@tin 4000 y4412 ]# cd /sys/class/pwm/
[root@tiny4412 pwm]# ls
pwmchip0
[root@tiny4412 pwm]# cd pwmchip0/
[root@tiny4412 pwmchip0]# ls
device export npwm power subsystem uevent unexport
在/sys/class/pwm中有注册的pwmchip0,PWM0-3都对应这个pwmchip0,是调用pwmchip_add函数创建的。
[root@tiny4412 pwmchip0]# ls
device export npwm power subsystem uevent unexport
[root@tiny4412 pwmchip0]# cat npwm
5
[root@tiny4412 pwmchip0]# echo 0 > export
[root@tiny4412 pwmchip0]# ls
device npwm pwm0 uevent
export power subsystem unexport
[root@tiny4412 pwmchip0]# cd pwm0/
[root@tiny4412 pwm0]# ls
duty_cycle enable period polarity power uevent
npwm的意思是Exynos4412支持的pwm通道个数(在驱动里将这个值设置为了5,即将timer4也包含在内了)。蜂鸣器对应的的PWM0,所以我们向export中写入0,然后就会在当前目录下产生了一个名为pwm0的新目录,其中是设置PWM0参数的配置文件。
在pwm0目录下:
polarity:接受normal或inversed两个参数,表示TOUT_0电平翻转;在exynos4412的用户手册的第24节:
period:表示pwm波的周期(单位:纳秒);
duty_cycle:在normal模式下,表示一个周期内高电平持续的时间(单位:纳秒),所以duty_cycle <= period;在reversed模式下,表示一个周期中低电平持续的时间(单位:纳秒);
enable:向其中写入1表示启动pwm,写入0,表示关闭pwm;
更多详情请参考内核文档:Documentation/pwm.txt
下面分享一个判断tiny4412底板上的蜂鸣器是有源的还是无源的方法:
首先先关闭pwm,即向enable中写入0;然后向polarity中写入inversed,如果蜂鸣器开始响,那么就是有源蜂鸣器,否则就是无源蜂鸣器。原理是:关闭了pwm后,在normal下,TOUT_0输出低电平,在inversed模式下,TOUT_0输出高电平。(从tiny4412的原理图中看到,pwm输出高电平时,三极管导通,蜂鸣器开始响,有源蜂鸣器的特点是,只要给它一个高电平,就响,而无源的特点是,必须给脉冲才响)
下面实现一个频率为1Hz, 占空比为1:9的例子:
[root@tiny4412 ]# cd /sys/class/pwm/pwmchip0/
[root@tiny4412 pwmchip0]# ls
device export npwm power subsystem uevent unexport
[root@tiny4412 pwmchip0]# echo 0 > export
[root@tiny4412 pwmchip0]# ls
device npwm pwm0 uevent
export power subsystem unexport
[root@tiny4412 pwmchip0]# cd pwm0/
[root@tiny4412 pwm0]# ls
duty_cycle enable period polarity power uevent
[root@tiny4412 pwm0]# echo normal > polarity
[root@tiny4412 pwm0]# echo 1000000000 > period
[root@tiny4412 pwm0]# echo 100000000 > duty_cycle
[root@tiny4412 pwm0]# echo 1 > enable
[root@tiny4412 pwm0]#
这里:1秒 = 1 000 000 000 纳秒
向unexport中写入0,pwm0目录会被自动删除。
[root@tiny4412 pwmchip0]# ls
device npwm pwm0 uevent
export power subsystem unexport
[root@tiny4412 pwmchip0]# echo 0 > unexport
[root@tiny4412 pwmchip0]# ls
device export npwm power subsystem uevent unexport
未完待续。

相关文章推荐
- 基于tiny4412的Linux内核移植 -- PWM子系统学习(八)
- 基于tiny4412的Linux内核移植 -- PWM子系统学习(七)
- 基于tiny4412的Linux内核移植 -- 设备树的展开
- 基于tiny4412的Linux内核移植 -- DM9621NP网卡驱动移植(四)
- 【嵌入式Linux学习七步曲之第四篇 Linux内核移植】详解Linux2.6内核中基于platform机制的驱动模型
- 基于tiny4412的Linux内核移植 -- MMA7660驱动移植(九-2)
- 基于tiny210v2的linux-3.9.6内核驱动移植4:PWM移植
- 基于tiny4412的Linux内核移植 -- 设备树的展开
- 基于tiny4412的Linux内核移植 -- eMMC驱动移植(六)
- 基于tiny4412的Linux内核移植 -- DM9621NP网卡驱动移植(四)
- 基于tiny4412的Linux内核移植 -- SD卡驱动移植(五)
- 基于tiny4412的Linux内核移植 --- aliases节点解析
- 基于tiny4412的Linux内核移植 -- MMA7660驱动移植(九)
- Linux芯片级移植与底层驱动(基于3.7.4内核)
- 基于Linux内核SPI子系统工作机制
- 基于Tiny4412的Linux按键输入子系统驱动的实现(二)
- 基于S3C2410平台移植Linux 2.6.14内核&驱动指南
- <<Linux内核完全剖析 --基于0.12内核>>学习笔记 第4章 80x86保护模式及其编程 4.7 任务管理
- Linux-2.6.32.2内核在mini2440上的移植(十六)---基于中断的按键驱动移植