linux的串口驱动分析
2017-09-06 15:03
417 查看
http://www.cnblogs.com/chd-zhangbo/p/5410336.html
1、串口驱动中的数据结构
• UART驱动程序结构:struct uart_driver 驱动
• UART端口结构: struct uart_port 串口
• UART相关操作函数结构: struct uart_ops 串口操作函数集
• UART状态结构: struct uart_state 串口状态
• UART信息结构: struct uart_info 串口信息
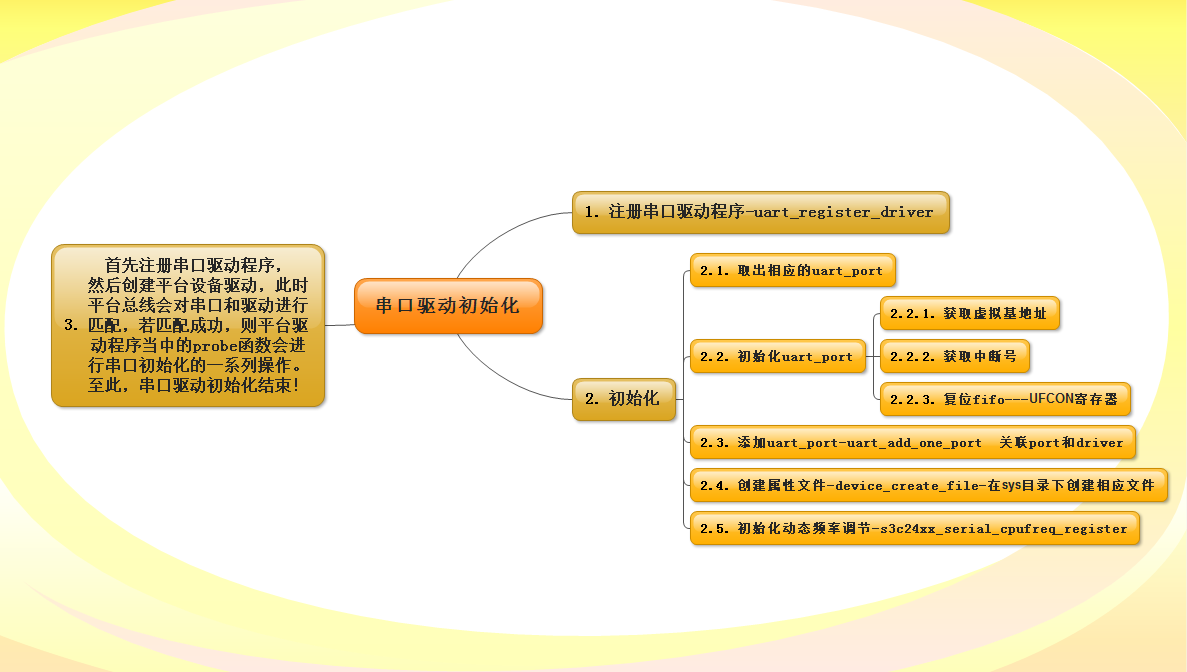
2、串口驱动程序-初始化
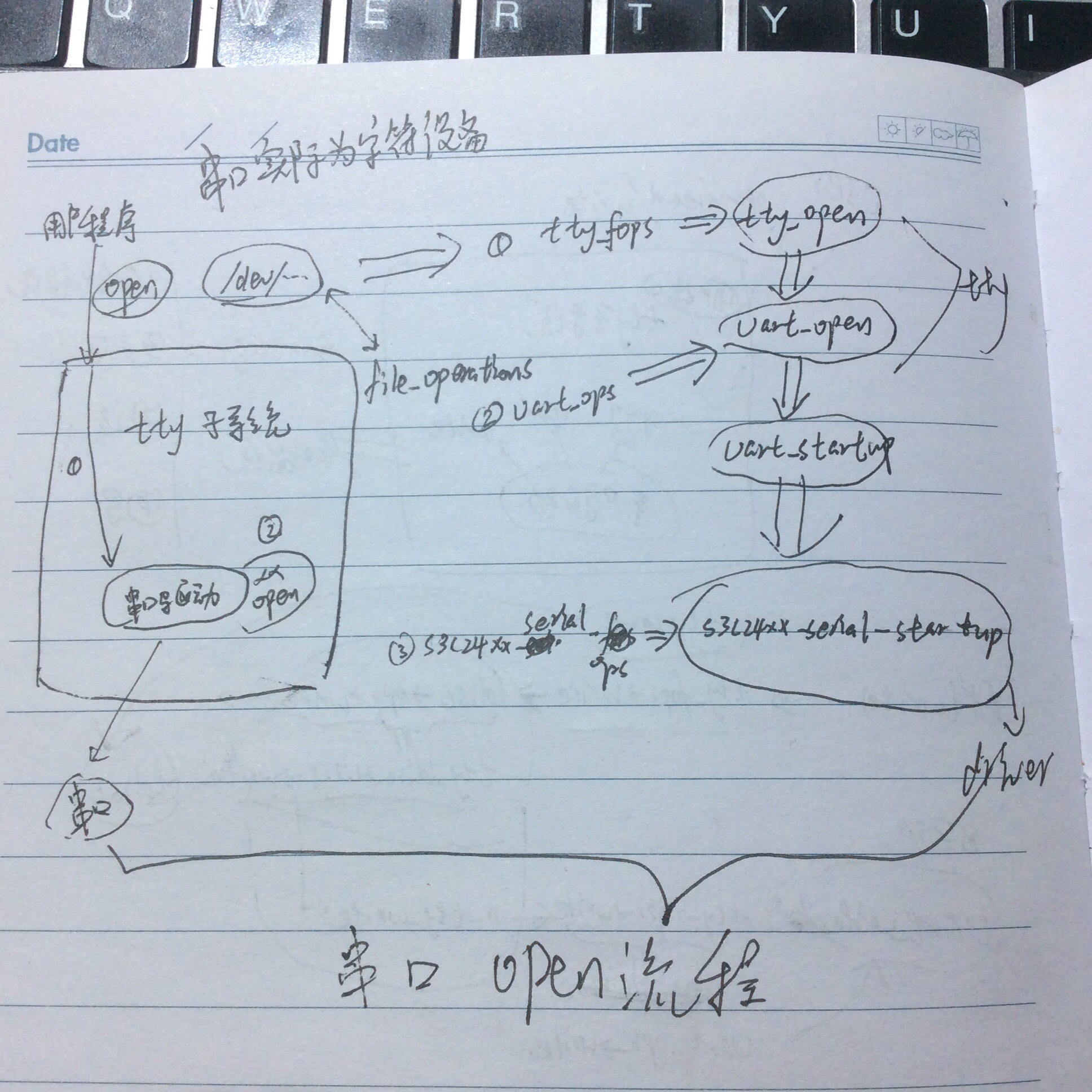
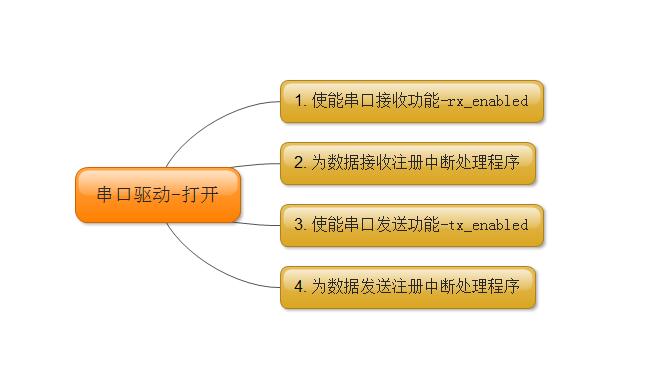
3、串口驱动分析-打开设备
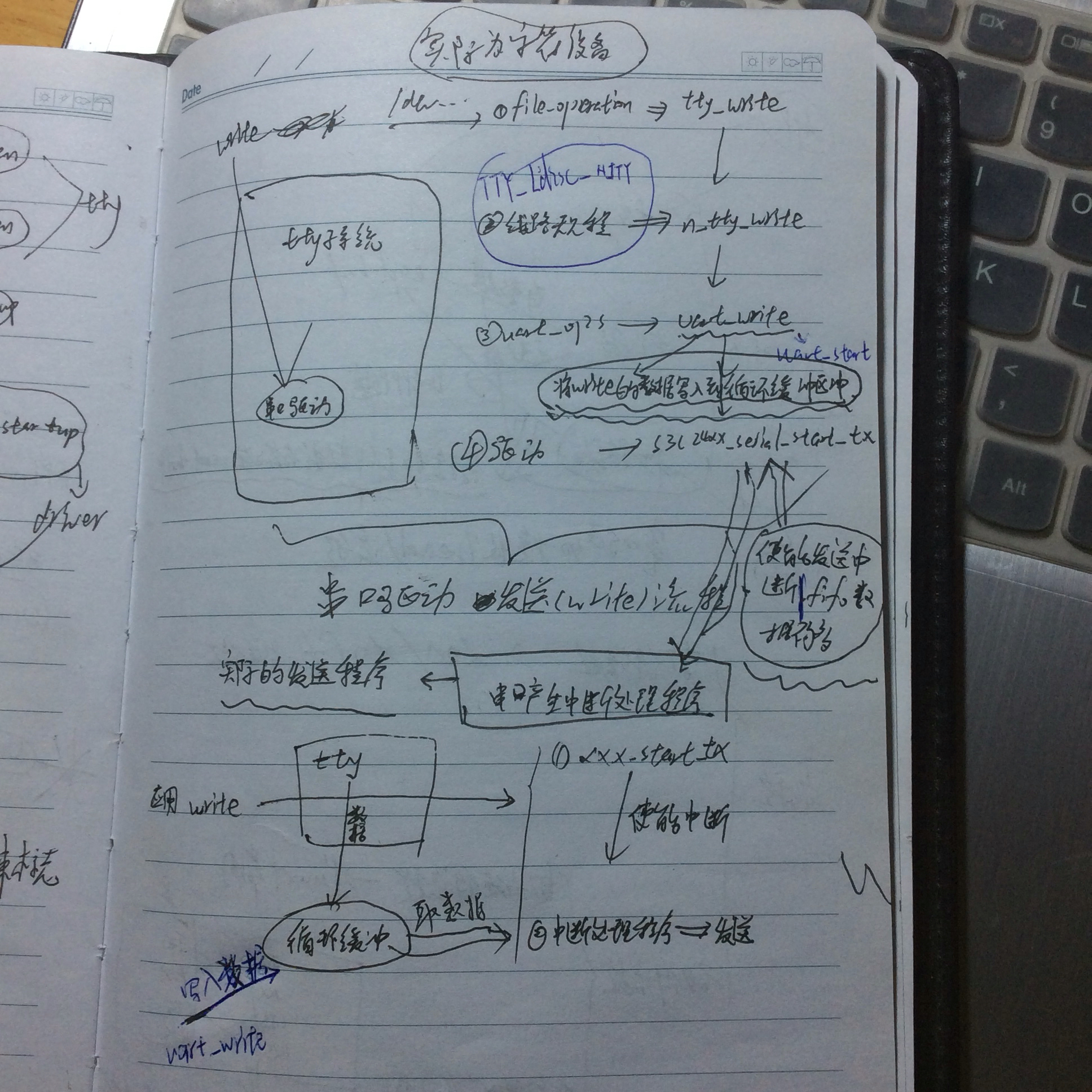
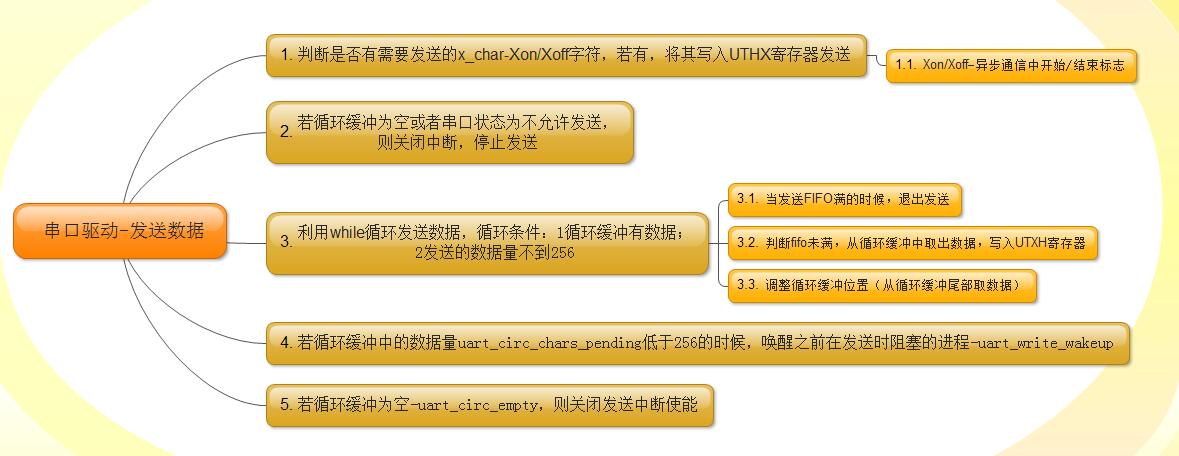
3、串口驱动程序-数据发送
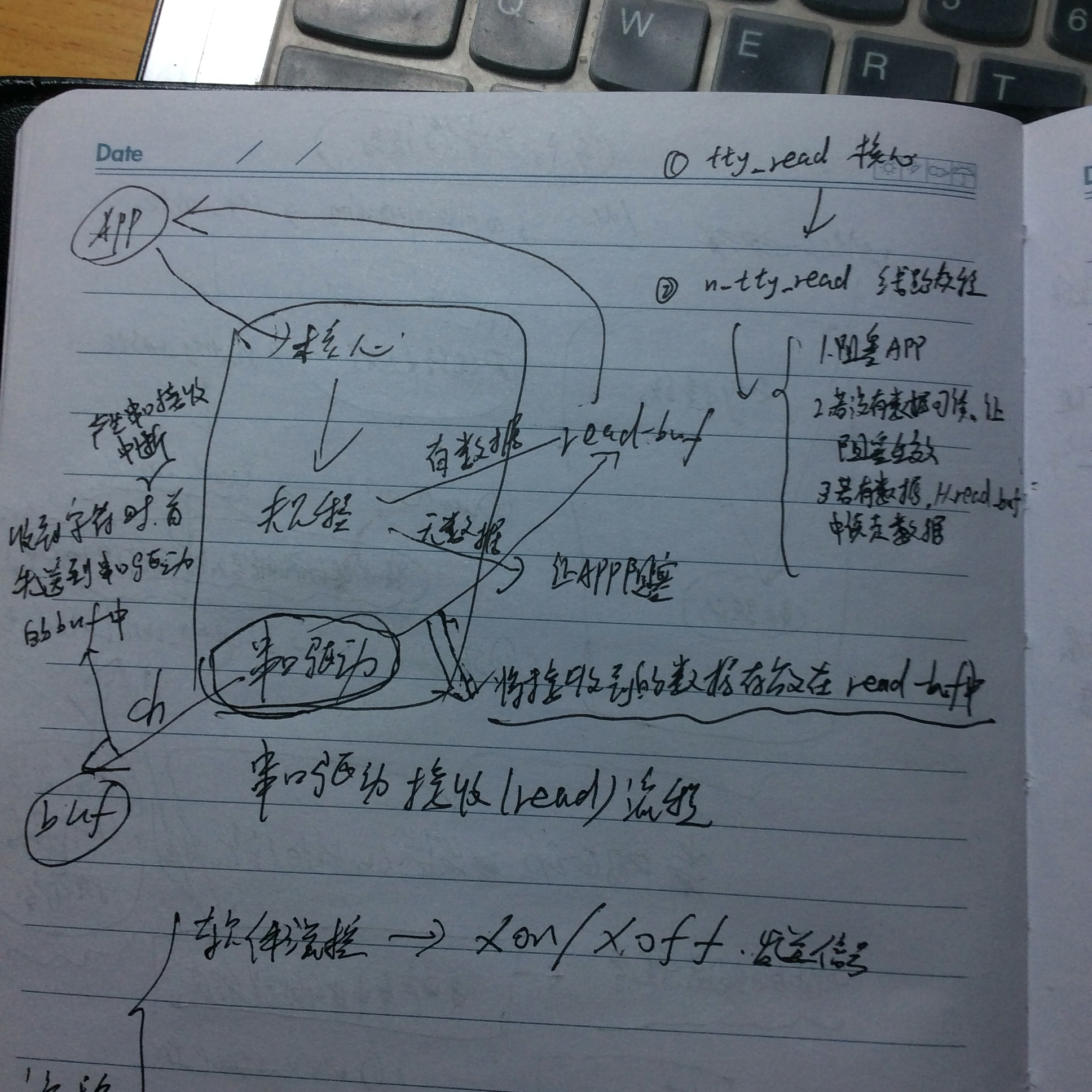
4、串口驱动程序-数据接收

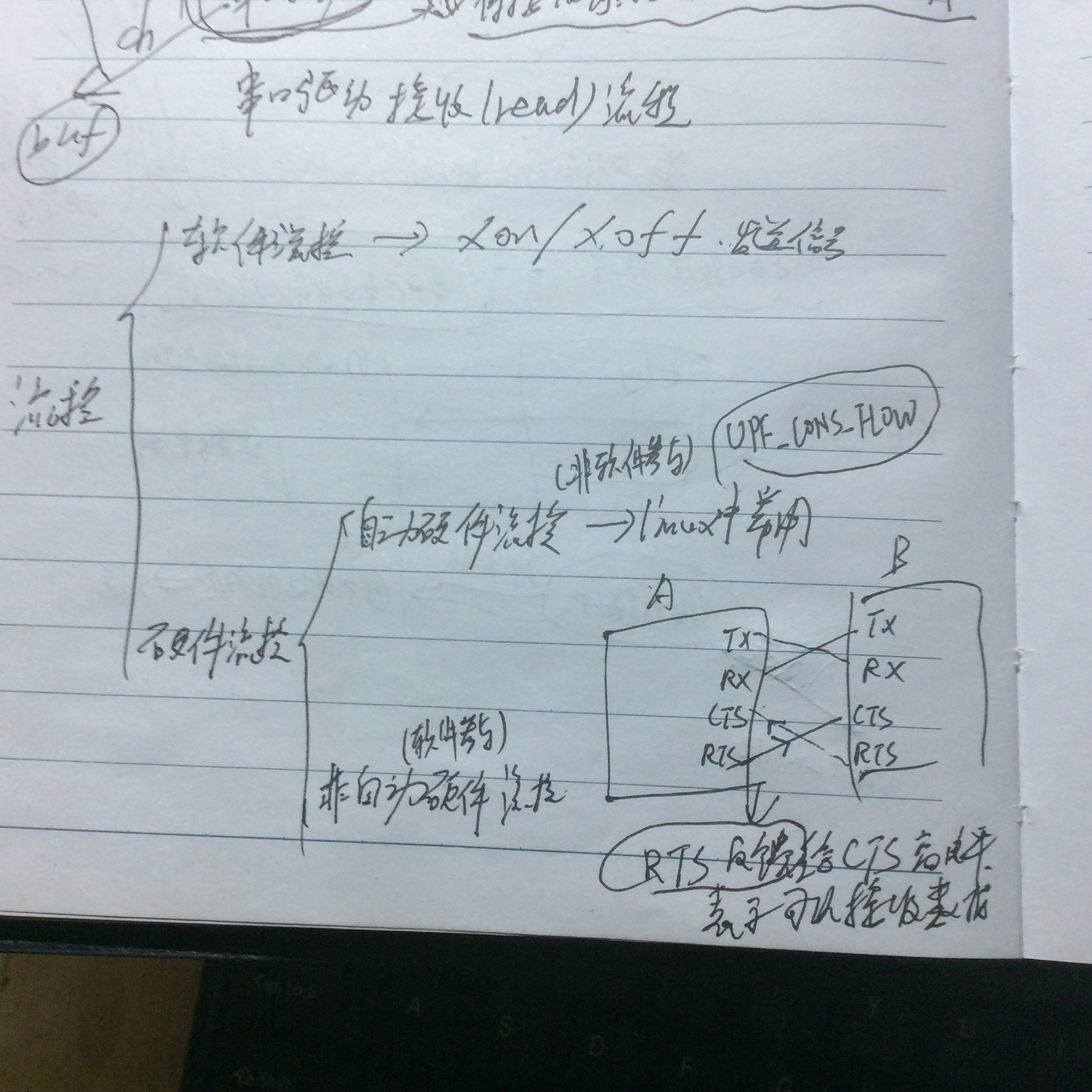
附:linux系统中一般的流控技术
1、串口驱动中的数据结构
• UART驱动程序结构:struct uart_driver 驱动
• UART端口结构: struct uart_port 串口
• UART相关操作函数结构: struct uart_ops 串口操作函数集
• UART状态结构: struct uart_state 串口状态
• UART信息结构: struct uart_info 串口信息
2、串口驱动程序-初始化
3、串口驱动分析-打开设备
static int s3c24xx_serial_startup(struct uart_port *port)
{
struct s3c24xx_uart_port *ourport = to_ourport(port);
int ret;
dbg("s3c24xx_serial_startup: port=%p (%08lx,%p)\n",
port->mapbase, port->membase);
rx_enabled(port) = 1;
ret = request_irq(ourport->rx_irq, s3c24xx_serial_rx_chars, 0,
s3c24xx_serial_portname(port), ourport);
if (ret != 0) {
printk(KERN_ERR "cannot get irq %d\n", ourport->rx_irq);
return ret;
}
ourport->rx_claimed = 1;
dbg("requesting tx irq...\n");
tx_enabled(port) = 1;
ret = request_irq(ourport->tx_irq, s3c24xx_serial_tx_chars, 0,
s3c24xx_serial_portname(port), ourport);
if (ret) {
printk(KERN_ERR "cannot get irq %d\n", ourport->tx_irq);
goto err;
}
ourport->tx_claimed = 1;
dbg("s3c24xx_serial_startup ok\n");
/* the port reset code should have done the correct
* register setup for the port controls */
return ret;
err:
s3c24xx_serial_shutdown(port);
return ret;
}3、串口驱动程序-数据发送
static void s3c24xx_serial_start_tx(struct uart_port *port)
{
struct s3c24xx_uart_port *ourport = to_ourport(port);
static int a =1;//temp
if (port->line == 3) {
// printk("485_start_tx\n");
if(a){
s3c_gpio_cfgpin(S3C64XX_GPK(5), S3C_GPIO_SFN(1));
a=0;
}
gpio_set_value(S3C64XX_GPK(5), 1);
}
if (!tx_enabled(port)) {
if (port->flags & UPF_CONS_FLOW)
s3c24xx_serial_rx_disable(port);
enable_irq(ourport->tx_irq);
tx_enabled(port) = 1;
}
}static irqreturn_t s3c24xx_serial_tx_chars(int irq, void *id)
{
struct s3c24xx_uart_port *ourport = id;
struct uart_port *port = &ourport->port;
struct circ_buf *xmit = &port->state->xmit;
int count = 256;
if (port->x_char) {
wr_regb(port, S3C2410_UTXH, port->x_char);
port->icount.tx++;
port->x_char = 0;
goto out;
}
/* if there isn't anything more to transmit, or the uart is now
* stopped, disable the uart and exit
*/
if (uart_circ_empty(xmit) || uart_tx_stopped(port)) {
s3c24xx_serial_stop_tx(port);
goto out;
}
/* try and drain the buffer... */
while (!uart_circ_empty(xmit) && count-- > 0) {
if (rd_regl(port, S3C2410_UFSTAT) & ourport->info->tx_fifofull)
break;
wr_regb(port, S3C2410_UTXH, xmit->buf[xmit->tail]);
xmit->tail = (xmit->tail + 1) & (UART_XMIT_SIZE - 1);
port->icount.tx++;
}
if (uart_circ_chars_pending(xmit) < WAKEUP_CHARS)
uart_write_wakeup(port);
if (uart_circ_empty(xmit))
s3c24xx_serial_stop_tx(port);
out:
return IRQ_HANDLED;
}4、串口驱动程序-数据接收
s3c24xx_serial_rx_chars(int irq, void *dev_id)
{
struct s3c24xx_uart_port *ourport = dev_id;
struct uart_port *port = &ourport->port;
struct tty_struct *tty = port->state->port.tty;
unsigned int ufcon, ch, flag, ufstat, uerstat;
int max_count = 64;
while (max_count-- > 0) {
ufcon = rd_regl(port, S3C2410_UFCON);
ufstat = rd_regl(port, S3C2410_UFSTAT);
if (s3c24xx_serial_rx_fifocnt(ourport, ufstat) == 0)
break;
uerstat = rd_regl(port, S3C2410_UERSTAT);
ch = rd_regb(port, S3C2410_URXH);
if (port->flags & UPF_CONS_FLOW) {
int txe = s3c24xx_serial_txempty_nofifo(port);
if (rx_enabled(port)) {
if (!txe) {
rx_enabled(port) = 0;
continue;
}
} else {
if (txe) {
ufcon |= S3C2410_UFCON_RESETRX;
wr_regl(port, S3C2410_UFCON, ufcon);
rx_enabled(port) = 1;
goto out;
}
continue;
}
}
/* insert the character into the buffer */
flag = TTY_NORMAL;
port->icount.rx++;
if (unlikely(uerstat & S3C2410_UERSTAT_ANY)) {
dbg("rxerr: port ch=0x%02x, rxs=0x%08x\n",
ch, uerstat);
/* check for break */
if (uerstat & S3C2410_UERSTAT_BREAK) {
dbg("break!\n");
port->icount.brk++;
if (uart_handle_break(port))
goto ignore_char;
}
if (uerstat & S3C2410_UERSTAT_FRAME)
port->icount.frame++;
if (uerstat & S3C2410_UERSTAT_OVERRUN)
port->icount.overrun++;
uerstat &= port->read_status_mask;
if (uerstat & S3C2410_UERSTAT_BREAK)
flag = TTY_BREAK;
else if (uerstat & S3C2410_UERSTAT_PARITY)
flag = TTY_PARITY;
else if (uerstat & (S3C2410_UERSTAT_FRAME |
S3C2410_UERSTAT_OVERRUN))
flag = TTY_FRAME;
}
if (uart_handle_sysrq_char(port, ch))
goto ignore_char;
uart_insert_char(port, uerstat, S3C2410_UERSTAT_OVERRUN,
ch, flag);
ignore_char:
continue;
}
tty_flip_buffer_push(tty);
out:
return IRQ_HANDLED;
}附:linux系统中一般的流控技术
