利用MATLAB计算SPWM脉冲宽度与并应用STM32输出
2017-09-01 09:19
399 查看
转自 光电科技协会 王诚博
http://blog.csdn.net/wcb425499094/article/details/76703042
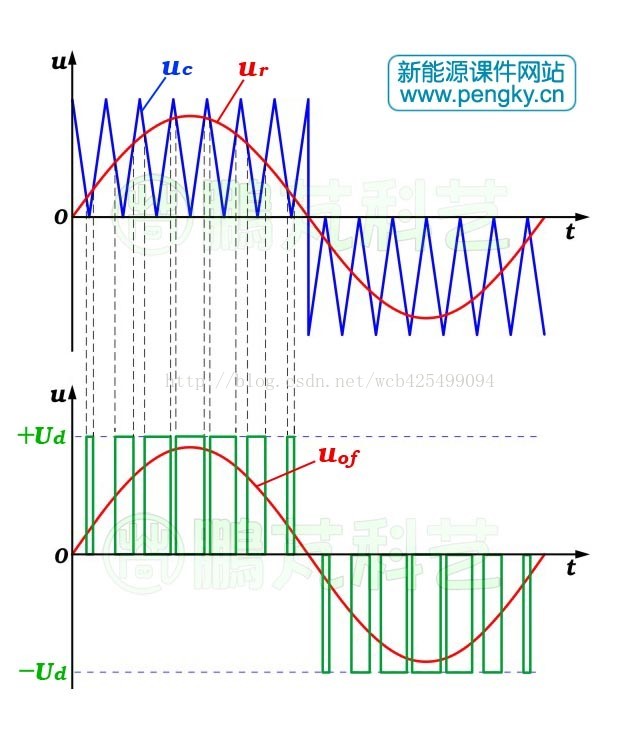
先上一张spwm波形生成原理图:
首先利用MATLAB产生三角波与正弦波叠加:
[cpp]
view plain
copy
print?
%% 产生正弦波与三角波叠加
y1=abs(sawtooth(a*2*pi*m,0.5));%三角波
y2=0.8*sin(a*pi);%正弦波
figure(1)
plot(a,y1,a,y2)

如图:

接着取交点,想了两种方法:
1.直接图片上取点,该方法不精确,毕竟只能目测和用鼠标点击。
[cpp]
view plain
copy
print?
[X Y]=ginput(40)%图像中取点(不精确)
save('kuan','X');

2.做差,使用阈值。
[cpp]
view plain
copy
print?
for i=1:length(y1)%利用差值取点,设定阈值
if(abs(y1(i)-y2(i))<0.01)
X(P)=a(i);
P=P+1;
end
end
阈值设置为0.001只取出20个点,但如上图应该有40个点,所以增大阈值,设为0.01。
取出了200个点,如图:

放大观察:
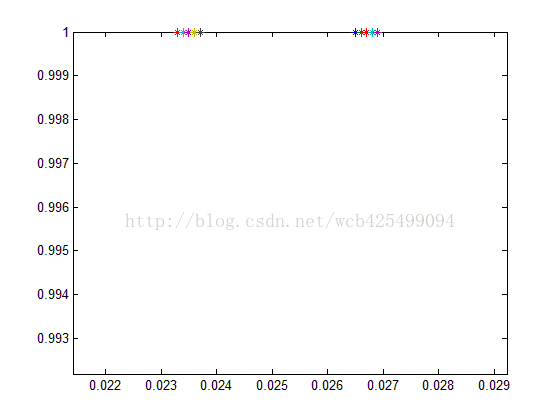
可知每个交点取出了5个点,40个点刚好200个,所以假设正弦波与三角波交点附近正弦波斜率不变,所以采用平均的方法:
[html]
view plain
copy
print?
for i=0:m*4-1%取平均值
x(i+1)=(X((i+1)*5)+X(i*5+1))/2;
end
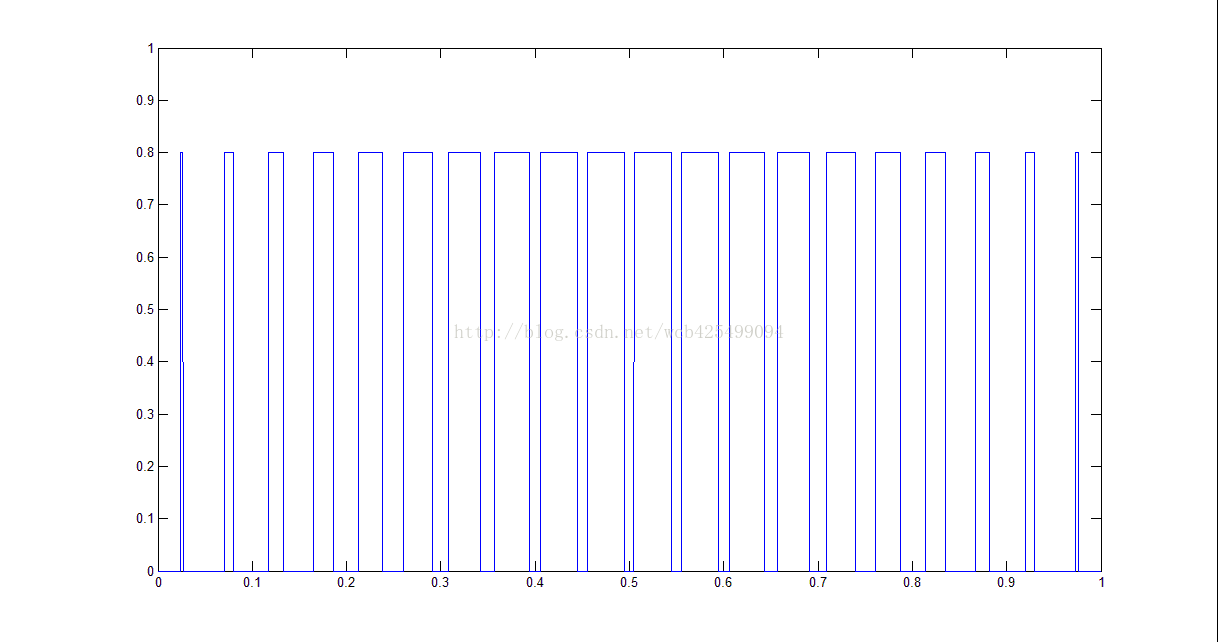
然后就可以画出spwm波形:
[cpp]
view plain
copy
print?
%% 画出SPWM波形
for n=1:m*2
y3(1:floor(x(1)*10000))=0;
y3(floor(x(2*n-1)*10000):floor(x(2*n)*10000))=0.8;
if(n==20)
break
end
y3(floor(x(2*n)*10000):floor(x(2*(n+1)-1)*10000))=0;
y3(floor(x(40)*10000):length(y3))=0;
end
figure(4)
plot(a,y3)
axis([0 1 0 1])
如图:
最后,计算正弦波半个周期的spwm的周期和占空比(使用stm32输出比较器输出pwm波):
[cpp]
view plain
copy
print?
%% 计算SPWM的周期,占空比(利用输出比较器)
for i=1:m
tp(i)=(x(2*(i+1)-1)-x(2*i-1))*th;%spwm周期
ti(i)=(x(2*i)-x(2*i-1))*th;%脉冲宽度
end
tc=[floor(tp./max(tp)*255),fliplr(floor(tp./max(tp)*255))];%单片机定时器从1计到255(最大spwm周期)
dlmwrite('cycle.c',tc);%写入c文件
p=ti./tp;%计算spwm占空比
p1=[p fliplr(p)];%半个正弦波周期spwm的占空比序列
p1=floor(p1.*tc);%单片机定时器基准脉冲宽度
dlmwrite('dac_sinWave.c',p1);
如果使用DAC描点:
[cpp]
view plain
copy
print?
b=floor(linspace(0,1,258)*10000);
for i=1:256
y4(i)=floor(y3(b(i+1))*4095);
end
dlmwrite('dac_SPWM.c',y4);
但该方法速度太慢,而且单片机利用效率太低,所以舍弃。
下面粘上MATLAB源代码:
[cpp]
view plain
copy
print?
%% 变量初始化
t=0.02;%正弦波周期
th=t/2;%半波周期
m=10;%三角波周期数
a=0:0.0001:1;
y3=0:0.0001:1;
P=1;
x=zeros(1);%分配空间
tp=zeros(1);
ti=zeros(1);
%% 产生正弦波与三角波叠加
y1=abs(sawtooth(a*2*pi*m,0.5));%三角波
y2=0.8*sin(a*pi);%正弦波
figure(1)
plot(a,y1,a,y2)
%% 取点
%[X Y]=ginput(40)%图像中取点(不精确)
% save('kuan','X');
for i=1:length(y1)%利用差值取点,设定阈值
if(abs(y1(i)-y2(i))<0.01)
X(P)=a(i);
P=P+1;
end
end
figure(2)
plot(a,y1,a,y2,X,1,'*')
for i=0:m*4-1%取平均值
x(i+1)=(X((i+1)*5)+X(i*5+1))/2;
end
figure(3)
plot(a,y1,a,y2,x,1,'*')
%% 画出SPWM波形
for n=1:m*2
y3(1:floor(x(1)*10000))=0;
y3(floor(x(2*n-1)*10000):floor(x(2*n)*10000))=0.8;
if(n==20)
break
end
y3(floor(x(2*n)*10000):floor(x(2*(n+1)-1)*10000))=0;
y3(floor(x(40)*10000):length(y3))=0;
end
figure(4)
plot(a,y3)
axis([0 1 0 1])
%% DAC描点法(速度太慢舍弃)
% b=floor(linspace(0,1,258)*10000);
% for i=1:256
% y4(i)=floor(y3(b(i+1))*4095);
% end
% dlmwrite('dac_SPWM.c',y4);
%% 计算SPWM的周期,占空比(利用输出比较器)
for i=1:m
tp(i)=(x(2*(i+1)-1)-x(2*i-1))*th;%spwm周期
ti(i)=(x(2*i)-x(2*i-1))*th;%脉冲宽度
end
tc=[floor(tp./max(tp)*255),fliplr(floor(tp./max(tp)*255))];%单片机定时器从1计到255(最大spwm周期)
dlmwrite('cycle.c',tc);%写入c文件
p=ti./tp;%计算spwm占空比
p1=[p fliplr(p)];%半个正弦波周期spwm的占空比序列
p1=floor(p1.*tc);%单片机定时器基准脉冲宽度
dlmwrite('dac_sinWave.c',p1);
stm32程序是用野火的例程改的,经过MATLAB计算得出周期与占空比(放入定时器的自动重装载寄存器ARR和比较寄存器CRR):
[cpp]
view plain
copy
print?
uint8_t indexWave[] = {16,47,78,106,132,155,174,188,198,203,203,198,
188,174,155,132,106,78,47,16};
uint8_t indexcycle[] = {241,241,242,243,244,246,248,250,252,255,255,
252,250,248,246,244,243,242,241,241};
在中断中改变寄存器的值(三路输出):
[cpp]
view plain
copy
print?
TIM3->ARR = indexcycle[pwm_index];
TIM3->CCR2 = indexWave[pwm_index];
TIM3->CCR3 = indexWave[pwm_index];
TIM3->CCR4 = indexWave[pwm_index];
pwm_index++;
定时器配置
[cpp]
view plain
copy
print?
/*基本定时器配置*/
[cpp]
view plain
copy
print?
TIM_TimeBaseStructure.TIM_Period = 255;
TIM_TimeBaseStructure.TIM_Prescaler = 0;
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1 ;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
[cpp]
view plain
copy
print?
/*PWM模式配置*/
[cpp]
view plain
copy
print?
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = 0;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; <span style="font-family: Arial, Helvetica, sans-serif;"> </span>
[cpp]
view plain
copy
print?
TIM_OC2Init(TIM3, &TIM_OCInitStructure);
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable);
TIM_OC3Init(TIM3, &TIM_OCInitStructure);
TIM_OC3PreloadConfig(TIM3, TIM_OCPreload_Enable);
TIM_OC4Init(TIM3, &TIM_OCInitStructure);
TIM_OC4PreloadConfig(TIM3, TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM3, ENABLE);
/* TIM3 enable counter */
TIM_Cmd(TIM3, ENABLE);
TIM_ITConfig(TIM3,TIM_IT_Update, ENABLE);
NVIC_Config_PWM();
使用示波器观察得到SPWM输出:
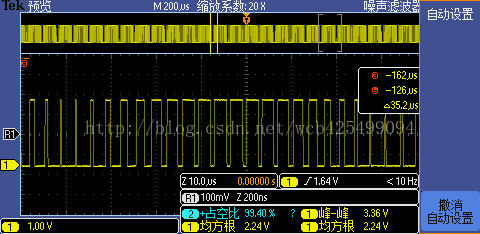
看出这是SPWM波形。
http://blog.csdn.net/wcb425499094/article/details/76703042
先上一张spwm波形生成原理图:
首先利用MATLAB产生三角波与正弦波叠加:
[cpp]
view plain
copy
print?
%% 产生正弦波与三角波叠加
y1=abs(sawtooth(a*2*pi*m,0.5));%三角波
y2=0.8*sin(a*pi);%正弦波
figure(1)
plot(a,y1,a,y2)
%% 产生正弦波与三角波叠加 y1=abs(sawtooth(a*2*pi*m,0.5));%三角波 y2=0.8*sin(a*pi);%正弦波 figure(1) plot(a,y1,a,y2)
如图:
接着取交点,想了两种方法:
1.直接图片上取点,该方法不精确,毕竟只能目测和用鼠标点击。
[cpp]
view plain
copy
print?
[X Y]=ginput(40)%图像中取点(不精确)
save('kuan','X');
[X Y]=ginput(40)%图像中取点(不精确)
save('kuan','X');2.做差,使用阈值。
[cpp]
view plain
copy
print?
for i=1:length(y1)%利用差值取点,设定阈值
if(abs(y1(i)-y2(i))<0.01)
X(P)=a(i);
P=P+1;
end
end
for i=1:length(y1)%利用差值取点,设定阈值 if(abs(y1(i)-y2(i))<0.01) X(P)=a(i); P=P+1; end end
阈值设置为0.001只取出20个点,但如上图应该有40个点,所以增大阈值,设为0.01。
取出了200个点,如图:
放大观察:
可知每个交点取出了5个点,40个点刚好200个,所以假设正弦波与三角波交点附近正弦波斜率不变,所以采用平均的方法:
[html]
view plain
copy
print?
for i=0:m*4-1%取平均值
x(i+1)=(X((i+1)*5)+X(i*5+1))/2;
end
for i=0:m*4-1%取平均值 x(i+1)=(X((i+1)*5)+X(i*5+1))/2; end
然后就可以画出spwm波形:
[cpp]
view plain
copy
print?
%% 画出SPWM波形
for n=1:m*2
y3(1:floor(x(1)*10000))=0;
y3(floor(x(2*n-1)*10000):floor(x(2*n)*10000))=0.8;
if(n==20)
break
end
y3(floor(x(2*n)*10000):floor(x(2*(n+1)-1)*10000))=0;
y3(floor(x(40)*10000):length(y3))=0;
end
figure(4)
plot(a,y3)
axis([0 1 0 1])
%% 画出SPWM波形 for n=1:m*2 y3(1:floor(x(1)*10000))=0; y3(floor(x(2*n-1)*10000):floor(x(2*n)*10000))=0.8; if(n==20) break end y3(floor(x(2*n)*10000):floor(x(2*(n+1)-1)*10000))=0; y3(floor(x(40)*10000):length(y3))=0; end figure(4) plot(a,y3) axis([0 1 0 1])
如图:
最后,计算正弦波半个周期的spwm的周期和占空比(使用stm32输出比较器输出pwm波):
[cpp]
view plain
copy
print?
%% 计算SPWM的周期,占空比(利用输出比较器)
for i=1:m
tp(i)=(x(2*(i+1)-1)-x(2*i-1))*th;%spwm周期
ti(i)=(x(2*i)-x(2*i-1))*th;%脉冲宽度
end
tc=[floor(tp./max(tp)*255),fliplr(floor(tp./max(tp)*255))];%单片机定时器从1计到255(最大spwm周期)
dlmwrite('cycle.c',tc);%写入c文件
p=ti./tp;%计算spwm占空比
p1=[p fliplr(p)];%半个正弦波周期spwm的占空比序列
p1=floor(p1.*tc);%单片机定时器基准脉冲宽度
dlmwrite('dac_sinWave.c',p1);
%% 计算SPWM的周期,占空比(利用输出比较器)
for i=1:m
tp(i)=(x(2*(i+1)-1)-x(2*i-1))*th;%spwm周期
ti(i)=(x(2*i)-x(2*i-1))*th;%脉冲宽度
end
tc=[floor(tp./max(tp)*255),fliplr(floor(tp./max(tp)*255))];%单片机定时器从1计到255(最大spwm周期)
dlmwrite('cycle.c',tc);%写入c文件
p=ti./tp;%计算spwm占空比
p1=[p fliplr(p)];%半个正弦波周期spwm的占空比序列
p1=floor(p1.*tc);%单片机定时器基准脉冲宽度
dlmwrite('dac_sinWave.c',p1);如果使用DAC描点:
[cpp]
view plain
copy
print?
b=floor(linspace(0,1,258)*10000);
for i=1:256
y4(i)=floor(y3(b(i+1))*4095);
end
dlmwrite('dac_SPWM.c',y4);
b=floor(linspace(0,1,258)*10000);
for i=1:256
y4(i)=floor(y3(b(i+1))*4095);
end
dlmwrite('dac_SPWM.c',y4);但该方法速度太慢,而且单片机利用效率太低,所以舍弃。
下面粘上MATLAB源代码:
[cpp]
view plain
copy
print?
%% 变量初始化
t=0.02;%正弦波周期
th=t/2;%半波周期
m=10;%三角波周期数
a=0:0.0001:1;
y3=0:0.0001:1;
P=1;
x=zeros(1);%分配空间
tp=zeros(1);
ti=zeros(1);
%% 产生正弦波与三角波叠加
y1=abs(sawtooth(a*2*pi*m,0.5));%三角波
y2=0.8*sin(a*pi);%正弦波
figure(1)
plot(a,y1,a,y2)
%% 取点
%[X Y]=ginput(40)%图像中取点(不精确)
% save('kuan','X');
for i=1:length(y1)%利用差值取点,设定阈值
if(abs(y1(i)-y2(i))<0.01)
X(P)=a(i);
P=P+1;
end
end
figure(2)
plot(a,y1,a,y2,X,1,'*')
for i=0:m*4-1%取平均值
x(i+1)=(X((i+1)*5)+X(i*5+1))/2;
end
figure(3)
plot(a,y1,a,y2,x,1,'*')
%% 画出SPWM波形
for n=1:m*2
y3(1:floor(x(1)*10000))=0;
y3(floor(x(2*n-1)*10000):floor(x(2*n)*10000))=0.8;
if(n==20)
break
end
y3(floor(x(2*n)*10000):floor(x(2*(n+1)-1)*10000))=0;
y3(floor(x(40)*10000):length(y3))=0;
end
figure(4)
plot(a,y3)
axis([0 1 0 1])
%% DAC描点法(速度太慢舍弃)
% b=floor(linspace(0,1,258)*10000);
% for i=1:256
% y4(i)=floor(y3(b(i+1))*4095);
% end
% dlmwrite('dac_SPWM.c',y4);
%% 计算SPWM的周期,占空比(利用输出比较器)
for i=1:m
tp(i)=(x(2*(i+1)-1)-x(2*i-1))*th;%spwm周期
ti(i)=(x(2*i)-x(2*i-1))*th;%脉冲宽度
end
tc=[floor(tp./max(tp)*255),fliplr(floor(tp./max(tp)*255))];%单片机定时器从1计到255(最大spwm周期)
dlmwrite('cycle.c',tc);%写入c文件
p=ti./tp;%计算spwm占空比
p1=[p fliplr(p)];%半个正弦波周期spwm的占空比序列
p1=floor(p1.*tc);%单片机定时器基准脉冲宽度
dlmwrite('dac_sinWave.c',p1);
%% 变量初始化
t=0.02;%正弦波周期
th=t/2;%半波周期
m=10;%三角波周期数
a=0:0.0001:1;
y3=0:0.0001:1;
P=1;
x=zeros(1);%分配空间
tp=zeros(1);
ti=zeros(1);
%% 产生正弦波与三角波叠加 y1=abs(sawtooth(a*2*pi*m,0.5));%三角波 y2=0.8*sin(a*pi);%正弦波 figure(1) plot(a,y1,a,y2)%% 取点
%[X Y]=ginput(40)%图像中取点(不精确)
% save('kuan','X');
for i=1:length(y1)%利用差值取点,设定阈值 if(abs(y1(i)-y2(i))<0.01) X(P)=a(i); P=P+1; end end
figure(2)
plot(a,y1,a,y2,X,1,'*')
for i=0:m*4-1%取平均值 x(i+1)=(X((i+1)*5)+X(i*5+1))/2; end
figure(3)
plot(a,y1,a,y2,x,1,'*')
%% 画出SPWM波形 for n=1:m*2 y3(1:floor(x(1)*10000))=0; y3(floor(x(2*n-1)*10000):floor(x(2*n)*10000))=0.8; if(n==20) break end y3(floor(x(2*n)*10000):floor(x(2*(n+1)-1)*10000))=0; y3(floor(x(40)*10000):length(y3))=0; end figure(4) plot(a,y3) axis([0 1 0 1])
%% DAC描点法(速度太慢舍弃)
% b=floor(linspace(0,1,258)*10000);
% for i=1:256
% y4(i)=floor(y3(b(i+1))*4095);
% end
% dlmwrite('dac_SPWM.c',y4);
%% 计算SPWM的周期,占空比(利用输出比较器) for i=1:m tp(i)=(x(2*(i+1)-1)-x(2*i-1))*th;%spwm周期 ti(i)=(x(2*i)-x(2*i-1))*th;%脉冲宽度 end tc=[floor(tp./max(tp)*255),fliplr(floor(tp./max(tp)*255))];%单片机定时器从1计到255(最大spwm周期) dlmwrite('cycle.c',tc);%写入c文件 p=ti./tp;%计算spwm占空比 p1=[p fliplr(p)];%半个正弦波周期spwm的占空比序列 p1=floor(p1.*tc);%单片机定时器基准脉冲宽度 dlmwrite('dac_sinWave.c',p1);
stm32程序是用野火的例程改的,经过MATLAB计算得出周期与占空比(放入定时器的自动重装载寄存器ARR和比较寄存器CRR):
[cpp]
view plain
copy
print?
uint8_t indexWave[] = {16,47,78,106,132,155,174,188,198,203,203,198,
188,174,155,132,106,78,47,16};
uint8_t indexcycle[] = {241,241,242,243,244,246,248,250,252,255,255,
252,250,248,246,244,243,242,241,241};
uint8_t indexWave[] = {16,47,78,106,132,155,174,188,198,203,203,198,
188,174,155,132,106,78,47,16};
uint8_t indexcycle[] = {241,241,242,243,244,246,248,250,252,255,255,
252,250,248,246,244,243,242,241,241};在中断中改变寄存器的值(三路输出):
[cpp]
view plain
copy
print?
TIM3->ARR = indexcycle[pwm_index];
TIM3->CCR2 = indexWave[pwm_index];
TIM3->CCR3 = indexWave[pwm_index];
TIM3->CCR4 = indexWave[pwm_index];
pwm_index++;
TIM3->ARR = indexcycle[pwm_index]; TIM3->CCR2 = indexWave[pwm_index]; TIM3->CCR3 = indexWave[pwm_index]; TIM3->CCR4 = indexWave[pwm_index]; pwm_index++;
定时器配置
[cpp]
view plain
copy
print?
/*基本定时器配置*/
/*基本定时器配置*/
[cpp]
view plain
copy
print?
TIM_TimeBaseStructure.TIM_Period = 255;
TIM_TimeBaseStructure.TIM_Prescaler = 0;
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1 ;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
TIM_TimeBaseStructure.TIM_Period = 255; TIM_TimeBaseStructure.TIM_Prescaler = 0; TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1 ; TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
[cpp]
view plain
copy
print?
/*PWM模式配置*/
/*PWM模式配置*/
[cpp]
view plain
copy
print?
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = 0;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; <span style="font-family: Arial, Helvetica, sans-serif;"> </span>
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; TIM_OCInitStructure.TIM_Pulse = 0; TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
[cpp]
view plain
copy
print?
TIM_OC2Init(TIM3, &TIM_OCInitStructure);
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable);
TIM_OC3Init(TIM3, &TIM_OCInitStructure);
TIM_OC3PreloadConfig(TIM3, TIM_OCPreload_Enable);
TIM_OC4Init(TIM3, &TIM_OCInitStructure);
TIM_OC4PreloadConfig(TIM3, TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM3, ENABLE);
/* TIM3 enable counter */
TIM_Cmd(TIM3, ENABLE);
TIM_ITConfig(TIM3,TIM_IT_Update, ENABLE);
NVIC_Config_PWM();
TIM_OC2Init(TIM3, &TIM_OCInitStructure); TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); TIM_OC3Init(TIM3, &TIM_OCInitStructure); TIM_OC3PreloadConfig(TIM3, TIM_OCPreload_Enable); TIM_OC4Init(TIM3, &TIM_OCInitStructure); TIM_OC4PreloadConfig(TIM3, TIM_OCPreload_Enable); TIM_ARRPreloadConfig(TIM3, ENABLE); /* TIM3 enable counter */ TIM_Cmd(TIM3, ENABLE); TIM_ITConfig(TIM3,TIM_IT_Update, ENABLE); NVIC_Config_PWM();
使用示波器观察得到SPWM输出:
看出这是SPWM波形。

相关文章推荐
- 利用MATLAB计算SPWM脉冲宽度与并应用STM32输出
- 【STM库应用】stm32 之 TIM (详解二 脉冲宽度、周期测量)
- 利用定时方式0,测量外部脉冲宽度(5到250ms),74HC595输出显示
- [置顶] STM32 输入捕获的脉冲宽度及频率计算
- 【STM库应用】stm32 之 TIM (详解二 脉冲宽度、周期测量)
- 【STM库应用】stm32 之 TIM (详解二 脉冲宽度、周期测量)
- 详解STM32的PWM输出及频率和脉宽(占空比)的计算——寄存器配置六步曲!
- matlab 利用while循环计算平均值和方差
- matlab与stm32之间利用串口通信记录
- VC++与MATLAB混合编程及其应用 通过引擎(Engine),采用客户机服务器的计算模式
- CUDA 医学成像是最早利用 GPU计算加快性能的应用之一
- 90页第三题,创建一个 Rectangle类,添加width和lenght两个成员变量 在 Rectangle类中添加两种方法分别计算矩形的周长和面积 ,编程利用Rectangle输出一个矩形的
- java中的栈Stack的基本使用和应用(二) ——利用栈计算合法的算术表达,中缀表达式转后缀表达式
- 可视化科学计算Matlab语言的简单应用
- 二、Ubuntu Server上安装Matlab,利用X11和Putty输出窗口到Windows桌面(环境安装)
- 创建一个 Rectangle类,添加width和lenght两个成员变量 在 Rectangle类中添加两种方法分别计算矩形的周长和面积 编程利用Rectangle输出一个矩形的周长和面积
- 利用51单片机统计脉冲个数,即时输出显示
- 1.创建一个Rectangle类,添加width和height两个成员变量。 2.在Rectangle中添加两种方法分别计算矩形的周长和面积 3.编程利用Rectangle输出一个矩形的周
- 利用MATLAB计算三维坐标序列距离误差程序