ROS学习笔记1-Beginner level
2017-08-27 16:37
393 查看
PART 1-Navigating the ROS Filesystem
1. rospack find [package_name]
2. roscd [ locationname[ /sudir] ]
subdirections: roscd roscpp/cmake
roscd log ( take you you to the folder where ROS stores log files)
3. rosls [ locationname[ /sudir] ]
PART 2-Creating a ROS package
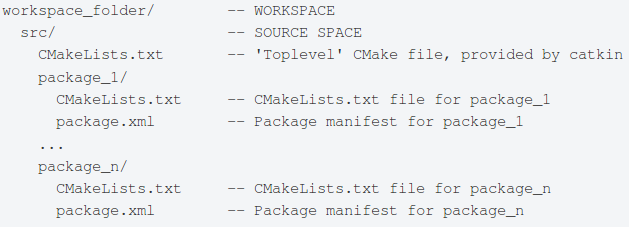
1. Packages in a catkin workspace
2. Creating a catkin package
3. Building a catkin workspace and sourcing the setup file
build :
source:
4. Package dependencies
These dependencies for a package are stored in the package.xml file. To see it:
a dependency will also have its own dependencies.
A package can have quite a few indirect dependencies.
5. Customizing your package
a. Customizing the package.xml
1. rospack find [package_name]
2. roscd [ locationname[ /sudir] ]
subdirections: roscd roscpp/cmake
roscd log ( take you you to the folder where ROS stores log files)
3. rosls [ locationname[ /sudir] ]
PART 2-Creating a ROS package
1. Packages in a catkin workspace
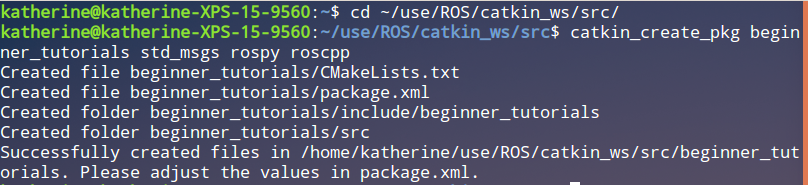
2. Creating a catkin package
catkin_create_pkg <package_name> [depend1] [depend2] [depend3]
3. Building a catkin workspace and sourcing the setup file
build :
$ cd ~/catkin_ws $ catkin_make
source:
$ . ~/catkin_ws/devel/setup.bash
4. Package dependencies
$ rospack depends1 beginner_tutorials
These dependencies for a package are stored in the package.xml file. To see it:
$ roscd beginner_tutorials $ cat package.xml
a dependency will also have its own dependencies.
$ rospack depends1 rospy
A package can have quite a few indirect dependencies.
$ rospack depends beginner_tutorials
5. Customizing your package
a. Customizing the package.xml
1 <?xml version="1.0"?> 2 <package> 3 <name>beginner_tutorials</name> 4 <version>0.1.0</version> 5 <description>The beginner_tutorials package</description> 6 7 <maintainer email="you@yourdomain.tld">Your Name</maintainer> 8 <license>BSD</license> 9 <url type="website">http://wiki.ros.org/beginner_tutorials</url> 10 <author email="you@yourdomain.tld">Jane Doe</author> 11 12 <buildtool_depend>catkin</buildtool_depend> 13 14 <build_depend>roscpp</build_depend> 15 <build_depend>rospy</build_depend> 16 <build_depend>std_msgs</build_depend> 17 18 <run_depend>roscpp</run_depend> 19 <run_depend>rospy</run_depend> 20 <run_depend>std_msgs</run_depend> 21 22 </package>

相关文章推荐
- ROS学习笔记 进不去目录 beginner_tutorials
- ROS学习笔记(四):ROS 的一些常用命令行功能
- ROS_RGB-D SLAM学习笔记--室内环境测试
- ROS with V-rep (2) (ROS学习笔记五)
- Ubuntu14.04_ROS学习笔记(1)ROS配置
- ros学习笔记3 - 功能包创建与编译
- ROS学习笔记——简单的消息发布器和订阅器 (Python版)
- ros学习笔记(1)
- ROS学习笔记10 - 编写编译和检验Service Node
- ros学习笔记(3)编写订阅者
- ROS学习笔记--消息发布器和订阅器
- ROS学习笔记(二):利用opencv将本地图片转换成ROS格式
- ROS进二阶学习笔记(8)-- 关于rospy 和 parameters
- 学习ROS笔记之TF——learning tf(二)
- ROS_RGB-D SLAM学习笔记--室内环境测试
- ROS学习笔记1--工作空间和功能包创建
- ROS学习笔记二(创建ROS软件包)
- ROS进二阶学习笔记(1) TF 学习笔记1:TF介绍 + tf工具
- 学习笔记(4)~WARNING: Application does not specify an API level requirement!
- 学习ROS笔记之Using A URDF In Gazebo