增量式PID的matlab仿真
2017-08-18 21:30
246 查看
首先,增量式PID的实现公式:

式中 Δe(k)=e(k)-e(k-1)
进一步可以改写成

式中
、
、
为了便于理解,也可写成:

式中e(k)为第k次采样时的设定值与实际值的差,e(k-1)为上一次采样时的设定值与实际值的差值,e(k-2)一样类推。
所以增量式PID 输出的是控制量的增量,无积分作用,因此该方法适用于执行机构带积分部件的对象,如步进电机等,而位置式PID适用于执行机构不带积分部件的对象,如电液伺服阀。
而且,由于增量式PID输出的是控制量增量,如果计算机出现故障,误动作影响较小,而执行机构本身有记忆功能,可仍保持原位,不会严重影响系统的工作,而位置式的输出直接对应对象的输出,
因此对系统影响较大。
%执行机构需要的是控制量的增量,例如驱动不仅电机的时候,采用增量式PID控制,
%增量式PID控制算法中不需要累加,控制增量u(k)仅与最近k次的采样有关,所以误动作影响小。
%设一被控对象G(s)=50/(0.125s^2+7s),
%用增量式PID控制算法编写仿真程序
%(输入分别为单位阶跃、正弦信号,采样时间为1ms,控制器输出限幅:[-5,5],
% 仿真曲线包括系统输出及误差曲线,并加上注释、图例)。
clc;
clear ;
ts=0.001; %采样时间
%sys=tf(50,[0.125,7, 0]); %tf是传递函数,用来实现G(s); 在自动控制领域经常用到,
sys=tf(400,[1,50,0]);
%sys=tf(50,[5,50,0]);
dsys=c2d(sys,ts,'z'); %把控制函数离散化,转化为拆分方程
[num,den]=tfdata(dsys,'v'); % 离散化后提取分子、分母 ,提取拆分方程系数
u_1=0.0;
u_2=0.0;
y_1=0.0;
y_2=0.0;
x=[0,0,0]';
error_1=0;
error_2=0;
for k=1:1:3000
time(k)=k*ts; %采样次数
S=1; %选择需要跟踪的函数
if S==1
% kp=10;ki=0.1;kd=15; %初始化PID
%kp=8;ki=0.1;kd=10;
kp=8;ki=0.1;kd=10;
rin(k)=1; %Step Signal ,阶跃信号
end
if S==2
kp=10;ki=0.1;kd=15;
rin(k)=0.5*sin(2*pi*k*ts); %Sine Signal 正弦信号
end
if S==3 %三角波信号
kp=10;ki=0.1;kd=15;
if mod(time(k),2)<1
rin(k)=mod(time(k),1);
else
rin(k)=1-mod(time(k),1);
end
rin(k)=rin(k)-0.5;
end
if S==4 %锯齿波信号
kp=8;ki=0.05;kd=4; %测试得合适参数,如果输出过冲,可将kd调小。
rin(k)=mod(time(k),1);
end
du(k)=kp*x(1)+kd*x(2)+ki*x(3); %PID Controller 控制系数
u(k)=u_1+du(k);
if u(k)>=10 %Restricting the output of controller,输出限幅
u(k)=10;
end
if u(k)<=-10
u(k)=-10;
end
%Linear model
yout(k)=-den(2)*y_1-den(3)*y_2+num(2)*u_1+num(3)*u_2; %实际输出
error(k)=rin(k)-yout(k); %Return of parameters 误差
u_2=u_1; %保存上上次输入 为下次计算
u_1=u(k); %保存上一次控制系数 为下次计算
y_2=y_1; %保存上上次次输出 为下次计算
y_1=yout(k
ba9c
); %保存上一次输出 为下次计算
x(1)=error(k)-error_1; %Calculating P
x(2)=error(k)-2*error_1+error_2; %Calculating D
x(3)=error(k); %Calculating I
error_2=error_1;
error_1=error(k);
end
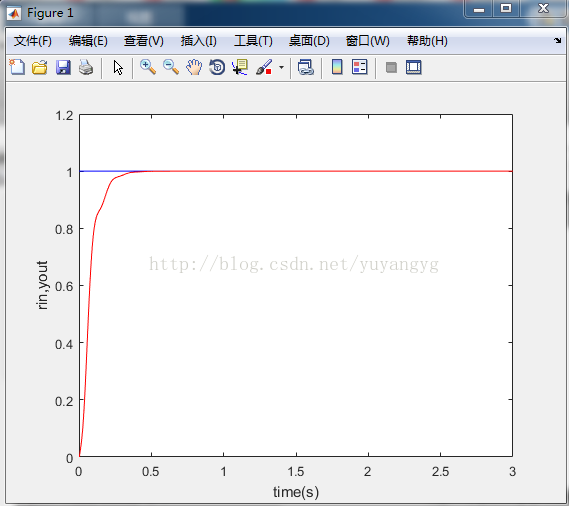
figure(1);
plot(time,rin,'b',time,yout,'r'); %输入 和实际控制输出
xlabel('time(s)'),ylabel('rin,yout');
% figure(2);
% plot(time,error,'r') %输入与输出误差输出曲线
% xlabel('time(s)');ylabel('error');
http://blog.csdn.net/m0_37655357/article/details/72628300
式中 Δe(k)=e(k)-e(k-1)
进一步可以改写成
式中
、
、
为了便于理解,也可写成:
式中e(k)为第k次采样时的设定值与实际值的差,e(k-1)为上一次采样时的设定值与实际值的差值,e(k-2)一样类推。
所以增量式PID 输出的是控制量的增量,无积分作用,因此该方法适用于执行机构带积分部件的对象,如步进电机等,而位置式PID适用于执行机构不带积分部件的对象,如电液伺服阀。
而且,由于增量式PID输出的是控制量增量,如果计算机出现故障,误动作影响较小,而执行机构本身有记忆功能,可仍保持原位,不会严重影响系统的工作,而位置式的输出直接对应对象的输出,
因此对系统影响较大。
%执行机构需要的是控制量的增量,例如驱动不仅电机的时候,采用增量式PID控制,
%增量式PID控制算法中不需要累加,控制增量u(k)仅与最近k次的采样有关,所以误动作影响小。
%设一被控对象G(s)=50/(0.125s^2+7s),
%用增量式PID控制算法编写仿真程序
%(输入分别为单位阶跃、正弦信号,采样时间为1ms,控制器输出限幅:[-5,5],
% 仿真曲线包括系统输出及误差曲线,并加上注释、图例)。
clc;
clear ;
ts=0.001; %采样时间
%sys=tf(50,[0.125,7, 0]); %tf是传递函数,用来实现G(s); 在自动控制领域经常用到,
sys=tf(400,[1,50,0]);
%sys=tf(50,[5,50,0]);
dsys=c2d(sys,ts,'z'); %把控制函数离散化,转化为拆分方程
[num,den]=tfdata(dsys,'v'); % 离散化后提取分子、分母 ,提取拆分方程系数
u_1=0.0;
u_2=0.0;
y_1=0.0;
y_2=0.0;
x=[0,0,0]';
error_1=0;
error_2=0;
for k=1:1:3000
time(k)=k*ts; %采样次数
S=1; %选择需要跟踪的函数
if S==1
% kp=10;ki=0.1;kd=15; %初始化PID
%kp=8;ki=0.1;kd=10;
kp=8;ki=0.1;kd=10;
rin(k)=1; %Step Signal ,阶跃信号
end
if S==2
kp=10;ki=0.1;kd=15;
rin(k)=0.5*sin(2*pi*k*ts); %Sine Signal 正弦信号
end
if S==3 %三角波信号
kp=10;ki=0.1;kd=15;
if mod(time(k),2)<1
rin(k)=mod(time(k),1);
else
rin(k)=1-mod(time(k),1);
end
rin(k)=rin(k)-0.5;
end
if S==4 %锯齿波信号
kp=8;ki=0.05;kd=4; %测试得合适参数,如果输出过冲,可将kd调小。
rin(k)=mod(time(k),1);
end
du(k)=kp*x(1)+kd*x(2)+ki*x(3); %PID Controller 控制系数
u(k)=u_1+du(k);
if u(k)>=10 %Restricting the output of controller,输出限幅
u(k)=10;
end
if u(k)<=-10
u(k)=-10;
end
%Linear model
yout(k)=-den(2)*y_1-den(3)*y_2+num(2)*u_1+num(3)*u_2; %实际输出
error(k)=rin(k)-yout(k); %Return of parameters 误差
u_2=u_1; %保存上上次输入 为下次计算
u_1=u(k); %保存上一次控制系数 为下次计算
y_2=y_1; %保存上上次次输出 为下次计算
y_1=yout(k
ba9c
); %保存上一次输出 为下次计算
x(1)=error(k)-error_1; %Calculating P
x(2)=error(k)-2*error_1+error_2; %Calculating D
x(3)=error(k); %Calculating I
error_2=error_1;
error_1=error(k);
end
figure(1);
plot(time,rin,'b',time,yout,'r'); %输入 和实际控制输出
xlabel('time(s)'),ylabel('rin,yout');
% figure(2);
% plot(time,error,'r') %输入与输出误差输出曲线
% xlabel('time(s)');ylabel('error');
http://blog.csdn.net/m0_37655357/article/details/72628300

相关文章推荐
- 增量式PID 的matlab仿真
- 增量式PID控制算法的MATLAB仿真及思考
- 增量式PID的matlab实现
- Matlab的高斯输入的PID仿真
- MATLAB各类函数详细讲解 simulike系统仿真分析
- Kalman滤波 Matlab仿真
- leach协议matlab仿真代码
- 《卡尔曼滤波原理及应用-MATLAB仿真》程序-4.1
- 离合器预减振超载造成变速箱怠速异响matlab仿真分析
- Matlab 沿三维任意方向切割CT图的仿真计算
- OFDM的MATLAB仿真
- 基于纯方位粒子滤波目标跟踪及其matlab仿真
- Matlab下多径衰落信道的仿真
- 使用MATLAB程序、Simulink对控制系统进行仿真
- adams与matlab联合仿真
- 基于Matlab的一阶RC滤波器仿真
- 锁相放大算法的MATLAB的仿真设计
- matlab仿真正态分布曲线
- 神经网络及其matlab仿真
- 电力电子仿真软件 matlab的教程书