Android 5.0 Camera系统源码分析(1):CameraService启动流程
2017-08-02 10:30
976 查看
1. 前言
本文将分析Android系统源码,从frameworks层到hal层,暂不涉及app层和kernel层。由于某些函数比较复杂,在贴出代码时会适当对其进行简化。本文属于自己对源码的总结,仅仅是贯穿代码流程,不会深入分析各个细节。分析android系统源码,需要对android系统的某些知识点有所了解
涉及的知识点有:
(1)Android系统的智能指针 - 参考老罗的Android系统的智能指针(轻量级指针、强指针和弱指针)的实现原理分析
(2)Android进程间通信Binder - 参考老罗的Android进程间通信(IPC)机制Binder简要介绍和学习计划
(3)Android硬件抽象层(HAL) - 参考老罗的Android硬件抽象层(HAL)概要介绍和学习计划
2. frameworks层
Android的各个子模块的启动都是从它们的Service的启动开始的,所以我们将从CameraService的启动开始分析。CameraService的启动就在MediaServer的main函数中,代码路径在:frameworks/av/media/mediaserver/main_mediaserver.cpp[cpp] view
plain copy
int main(int argc __unused, char** argv)
{
......
CameraService::instantiate();
......
}
CameraService类定义如下:
[cpp] view
plain copy
class CameraService :
public BinderService<CameraService>,
public BnCameraService,
public IBinder::DeathRecipient,
public camera_module_callbacks_t
{
static char const* getServiceName() { return "media.camera"; }
......
}
mediaserver的main函数中调用了CameraService的instantiate函数来创建实例,该函数的实现在其父类BinderService中实现
[cpp] view
plain copy
template<typename SERVICE>
class BinderService
{
static status_t publish(bool allowIsolated = false) {
sp<IServiceManager> sm(defaultServiceManager());
return sm->addService(
String16(SERVICE::getServiceName()),
new SERVICE(), allowIsolated);
}
static void instantiate() { publish(); }
}
1. instantiate函数只是简单的调用了publish函数
2. publish函数先构造CameraService,再通过addService函数将它注册到ServiceManager当中,而getServiceName函数获取到的值为“media camera”。这一切都是为了binder通信做准备
3. 这里使用了c++模版,从上面的CameraService类定义中可以看出,这里的SERVICE等于CameraService,也就是说publish函数中的new SERVICE等于new CameraService
4. 同时还使用了智能指针,也就是说除了调用CameraService的构造函数外,还会调用onFirstRef函数
[cpp] view
plain copy
CameraService::CameraService()
:mSoundRef(0), mModule(0)
{
ALOGI("CameraService started (pid=%d)", getpid());
gCameraService = this;
for (size_t i = 0; i < MAX_CAMERAS; ++i) {
mStatusList[i] = ICameraServiceListener::STATUS_PRESENT;
}
this->camera_device_status_change = android::camera_device_status_change;
}
void CameraService::onFirstRef()
{
LOG1("CameraService::onFirstRef");
BnCameraService::onFirstRef();
if (hw_get_module(CAMERA_HARDWARE_MODULE_ID,
(const hw_module_t **)&mModule) < 0) {
ALOGE("Could not load camera HAL module");
mNumberOfCameras = 0;
}
else {
ALOGI("Loaded \"%s\" camera module", mModule->common.name);
mNumberOfCameras = mModule->get_number_of_cameras();
if (mNumberOfCameras > MAX_CAMERAS) {
ALOGE("Number of cameras(%d) > MAX_CAMERAS(%d).",
mNumberOfCameras, MAX_CAMERAS);
mNumberOfCameras = MAX_CAMERAS;
}
for (int i = 0; i < mNumberOfCameras; i++) {
LOG1("setCameraFree(%d)", i);
setCameraFree(i);
}
if (mModule->common.module_api_version >=
CAMERA_MODULE_API_VERSION_2_1) {
mModule->set_callbacks(this);
}
VendorTagDescriptor::clearGlobalVendorTagDescriptor();
if (mModule->common.module_api_version >= CAMERA_MODULE_API_VERSION_2_2) {
setUpVendorTags();
}
CameraDeviceFactory::registerService(this);
}
}
第20行. 通过hw_get_module函数加载了一个hw_module_t模块,这个模块是与hal层对接的接口,ID为CAMERA_HARDWARE_MODULE_ID,并将它保存在mModule成员变量中。
第27行. 通过mModule->get_number_of_cameras函数进入到hal层,获取到了camera的个数。这个函数很重要,对于frameworks层来说只是拿到了camera的个数,但对于hal层和drivers层来说Camera的上电和初始化流程都是从这里开始的
3. hal层-基于MTK平台
先来看看mtk camera module的定义,代码路径在:vendor/mediatek/proprietary/hardware/mtkcam/module_hal/module/module.h[cpp] view
plain copy
static
camera_module
get_camera_module()
{
camera_module module = {
common:{
tag : HARDWARE_MODULE_TAG,
#if (PLATFORM_SDK_VERSION >= 21)
module_api_version : CAMERA_MODULE_API_VERSION_2_3,
#else
module_api_version : CAMERA_DEVICE_API_VERSION_1_0,
#endif
hal_api_version : HARDWARE_HAL_API_VERSION,
id : CAMERA_HARDWARE_MODULE_ID,
name : "MediaTek Camera Module",
author : "MediaTek",
methods : get_module_methods(),
dso : NULL,
reserved : {0},
},
get_number_of_cameras : get_number_of_cameras,
get_camera_info : get_camera_info,
set_callbacks : set_callbacks,
get_vendor_tag_ops : get_vendor_tag_ops,
#if (PLATFORM_SDK_VERSION >= 21)
open_legacy : open_legacy,
#endif
reserved : {0},
};
return module;
};
1. 保存在frameworks层CameraService的成员变量mModule里面的就是上面这个module结构体
2. 当frameworks层调用mModule->get_number_of_cameras函数时,实际就是调用上面结构体的get_number_of_cameras函数
[cpp] view
plain copy
CamDeviceManagerImp gCamDeviceManager;
ICamDeviceManager*
getCamDeviceManager()
{
return &gCamDeviceManager;
}
static
int
get_number_of_cameras(void)
{
return NSCam::getCamDeviceManager()->getNumberOfDevices();
}
1. 这里先通过getCamDeviceManager函数获取了CamDeviceManagerImp对象
2. CamDeviceManagerImp继承了CamDeviceManagerBase,这里的getNumberOfDevices方法将由父类CamDeviceManagerBase实现
[cpp] view
plain copy
int32_t
CamDeviceManagerBase::
getNumberOfDevices()
{
mi4DeviceNum = enumDeviceLocked();
return mi4DeviceNum;
}
这里只是调用了enumDeviceLocked函数,并将它的返回值(代表了camera的个数)返回到frameworks层。接着看enumDeviceLocked的实现
[cpp] view
plain copy
int32_t
CamDeviceManagerImp::
enumDeviceLocked()
{
IHalSensorList*const pHalSensorList = IHalSensorList::get();
size_t const sensorNum = pHalSensorList->searchSensors();
for (size_t i = 0; i < sensorNum; i++)
{
int32_t const deviceId = i;
sp<EnumInfo> pInfo = new EnumInfo;
mEnumMap.add(deviceId, pInfo);
IMetadataProvider> pMetadataProvider = IMetadataProvider::create(deviceId);
pInfo->pMetadata = pMetadataProvider->getStaticCharacteristics();
pInfo->iFacing = (pMetadataProvider->getDeviceFacing() == MTK_LENS_FACING_FRONT)
? CAMERA_FACING_FRONT
: CAMERA_FACING_BACK
;
pInfo->iWantedOrientation = pMetadataProvider->getDeviceWantedOrientation();
pInfo->iSetupOrientation = pMetadataProvider->getDeviceSetupOrientation();
i4DeviceNum++;
}
return i4DeviceNum;
}
第5-6行. 这里需要重点关注pHalSensorList->searchSensors函数,它的返回值就是camera的个数
第8-24行. 循环构造并初始化一个EnumInfo对象,并把它保存在mEnumMap中
[cpp] view
plain copy
MUINT
HalSensorList::
enumerateSensor_Locked()
{
int ret_count = 0;
SensorDrv *const pSensorDrv = SensorDrv::get();
int const iSensorsList = pSensorDrv->impSearchSensor(NULL);
if((iSensorsList & SENSOR_DEV_MAIN) == SENSOR_DEV_MAIN)
{
halSensorDev = SENSOR_DEV_MAIN;
pSensorInfo = pSensorDrv->getMainSensorInfo();
addAndInitSensorEnumInfo_Locked(halSensorDev, ret_count, mapToSensorType(pSensorInfo->GetType()), pSensorInfo->getDrvMacroName());
ret_count++;
}
if((iSensorsList & SENSOR_DEV_SUB) == SENSOR_DEV_SUB)
{
halSensorDev = SENSOR_DEV_SUB;
pSensorInfo = pSensorDrv->getSubSensorInfo();
addAndInitSensorEnumInfo_Locked(halSensorDev, ret_count, mapToSensorType(pSensorInfo->GetType()), pSensorInfo->getDrvMacroName());
ret_count++;
}
mEnumSensorCount = ret_count;
return ret_count;
}
MUINT
HalSensorList::
searchSensors()
{
return enumerateSensor_Locked();
}
第33行. searchSensors函数只是调用了enumerateSensor_Locked函数,这里并没有贴出enumerateSensor_Locked函数的所有代码,删减了一些我们暂时不关注的东西
第7行. 重点函数pSensorDrv->impSearchSensor,它的返回值决定了enumerateSensor_Locked的返回值,也就是camera的个数
[cpp] view
plain copy
MINT32
ImgSensorDrv::impSearchSensor(pfExIdChk pExIdChkCbf)
{
MUINT32 SensorEnum = (MUINT32) DUAL_CAMERA_MAIN_SENSOR;
MUINT32 i,id[KDIMGSENSOR_MAX_INVOKE_DRIVERS] = {0,0};
MINT32 sensorDevs = SENSOR_NONE;
GetSensorInitFuncList(&m_pstSensorInitFunc);
m_fdSensor = ::open("/dev/kd_camera_hw", O_RDWR);
for (SensorEnum = DUAL_CAMERA_MAIN_SENSOR; SensorEnum <= DUAL_CAMERA_SUB_SENSOR; SensorEnum <<= 1) {
for (i = 0; i < MAX_NUM_OF_SUPPORT_SENSOR; i++) {
//end of driver list
if (m_pstSensorInitFunc[i].getCameraDefault == NULL) {
LOG_MSG("m_pstSensorInitFunc[i].getCameraDefault is NULL: %d \n", i);
break;
}
id[KDIMGSENSOR_INVOKE_DRIVER_0] = (SensorEnum << KDIMGSENSOR_DUAL_SHIFT) | i;
err = ioctl(m_fdSensor, KDIMGSENSORIOC_X_SET_DRIVER,&id[KDIMGSENSOR_INVOKE_DRIVER_0] );
err = ioctl(m_fdSensor, KDIMGSENSORIOC_T_CHECK_IS_ALIVE);
if (err < 0 || err2 < 0) {
LOG_MSG("sensor ID mismatch\n");
continue;
}
if (SensorEnum == DUAL_CAMERA_MAIN_SENSOR) {
m_mainSensorDrv.index[m_mainSensorDrv.number] = i;
m_mainSensorDrv.type[m_mainSensorDrv.number] = sensorType;
m_mainSensorDrv.position = socketPos;
m_mainSensorDrv.sensorID = m_pstSensorInitFunc[m_mainSensorDrv.index[m_mainSensorDrv.number]].SensorId;
m_mainSensorDrv.number++;
} else if (SensorEnum == DUAL_CAMERA_SUB_SENSOR) {
m_subSensorDrv.index[m_subSensorDrv.number] = i;
m_subSensorDrv.type[m_subSensorDrv.number] = sensorType;
m_subSensorDrv.position = socketPos;
m_subSensorDrv.sensorID = m_pstSensorInitFunc[m_subSensorDrv.index[m_subSensorDrv.number]].SensorId;
m_subSensorDrv.number++;
}
}
}
if (BAD_SENSOR_INDEX != m_mainSensorDrv.index[0]) {
m_mainSensorId = m_mainSensorDrv.sensorID;
m_mainSensorIdx = m_mainSensorDrv.index[0];
sensorDevs |= SENSOR_MAIN;
}
if (BAD_SENSOR_INDEX != m_subSensorDrv.index[0]) {
m_subSensorId = m_subSensorDrv.sensorID;
m_subSensorIdx = m_subSensorDrv.index[0];
sensorDevs |= SENSOR_SUB;
}
return sensorDevs;
}
这个函数比较长,所以只贴出关键代码
第8行, 调用GetSensorInitFuncList函数来获取hal层的sersors列表,并把它保存在m_pstSensorInitFunc变量中
第9行, 通过系统调用open函数打开camera的设备节点,后面会通过这个节点来进入到kernel层
第11-12行, 通过两个for循环来遍历sensorlist中所有可能存在的camera
第20行, 通过ioctl下达setDriver指令,并下传正在遍历的sensorlist中的ID。Driver层根据这个ID,挂载Driver层sensorlist中对应的操作接口
第21行, 通过ioctl下达check ID指令,Driver层为对应sensor上电,通过I2C读取预存在寄存器中的sensor id。然后比较读取结果,如果不匹配return error后继续遍历
第29-41行, 将sensor相关的信息保存在m_mainSensorDrv和m_subSensorDrv中
第45-56行, 给sensroDevs变量赋值,并将它返回给上一级
这里暂不分析kernel层的代码,先来看看GetSensorInitFuncList函数,代码在sensorlist.cpp中
[cpp] view
plain copy
MSDK_SENSOR_INIT_FUNCTION_STRUCT SensorList[] =
{
#if defined(IMX175_MIPI_RAW)
RAW_INFO(IMX175_SENSOR_ID, SENSOR_DRVNAME_IMX175_MIPI_RAW,NULL),
#endif
#if defined(IMX179_MIPI_RAW)
RAW_INFO(IMX179_SENSOR_ID, SENSOR_DRVNAME_IMX179_MIPI_RAW,NULL),
#endif
#if defined(IMX219_MIPI_RAW)
RAW_INFO(IMX219_SENSOR_ID, SENSOR_DRVNAME_IMX219_MIPI_RAW, NULL),
#endif
#if defined(IMX214_MIPI_RAW)
RAW_INFO(IMX214_SENSOR_ID, SENSOR_DRVNAME_IMX214_MIPI_RAW,NULL),
#endif
#if defined(GC2235_RAW)
RAW_INFO(GC2235_SENSOR_ID, SENSOR_DRVNAME_GC2235_RAW, NULL),
#endif
#if defined(GC2035_YUV)
YUV_INFO(GC2035_SENSOR_ID, SENSOR_DRVNAME_GC2035_YUV, NULL),
#endif
......
}
UINT32 GetSensorInitFuncList(MSDK_SENSOR_INIT_FUNCTION_STRUCT **ppSensorList)
{
*ppSensorList = &SensorList[0];
return MHAL_NO_ERROR;
}
hal层的sensorList,再熟悉不过的代码,需要注意的是hal层sensorList和kernel层的sensorList顺序必须保持一致
4. 总结
至此,除kernel层外,简述了CameraService的启动流程,大概过程如下图所示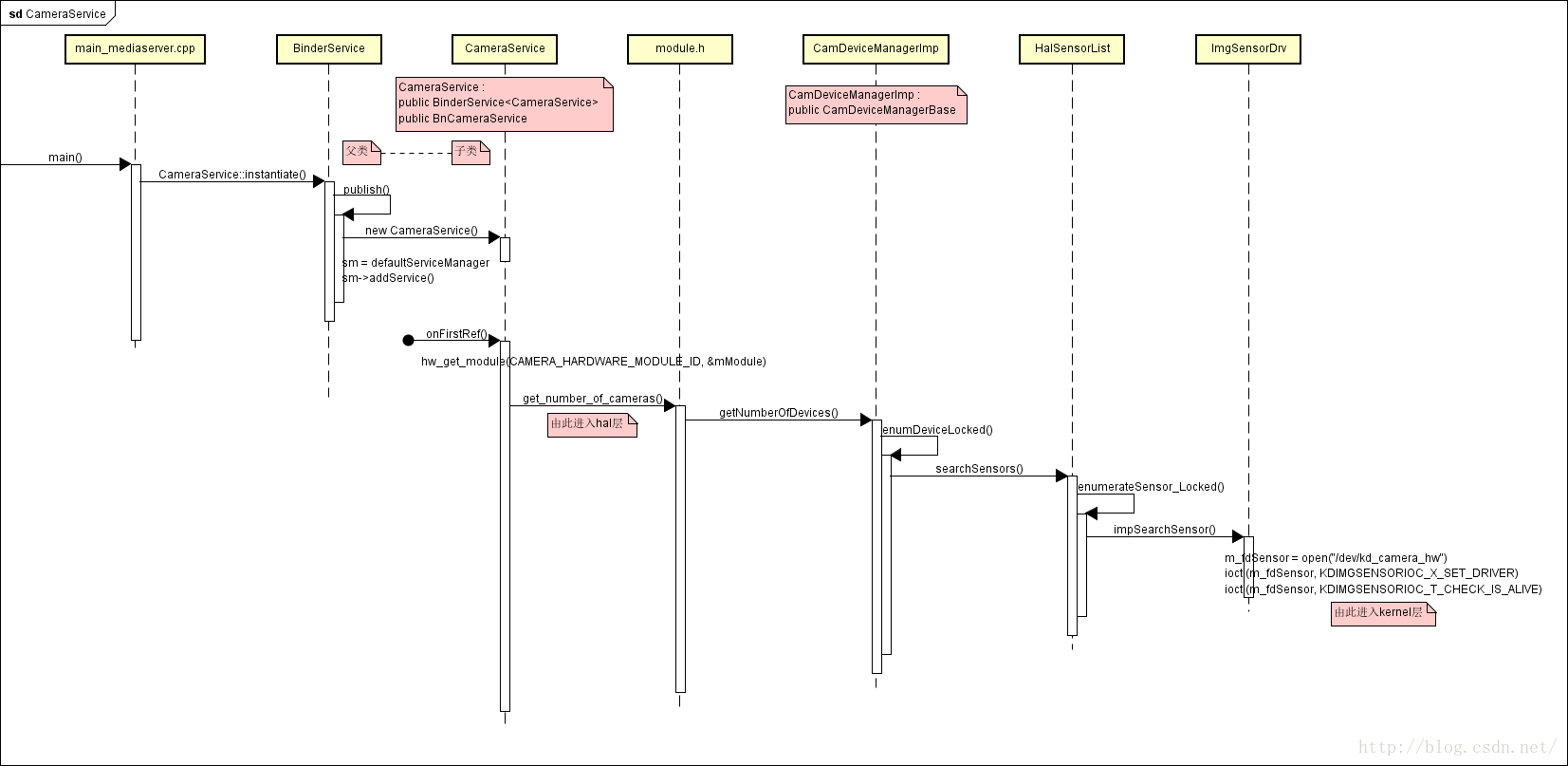

相关文章推荐
- Android 5.0 Camera系统源码分析(1):CameraService启动流程
- Android 5.0 Camera系统源码分析(1):CameraService启动流程
- Android 5.0 Camera系统源码分析(4):Camera预览流程数据流
- Android 5.0 Camera系统源码分析(3):Camera预览流程控制流
- Android 5.0 Camera系统源码分析(4):Camera预览流程数据流
- Android 5.0 Camera系统源码分析(2):Camera打开流程
- Android 5.0 Camera系统源码分析(5):Camera预览3A流程
- Android 5.0 Camera系统源码分析(3):Camera预览流程控制流
- Android 5.0 Camera系统源码分析(5):Camera预览3A流程
- Android 5.0 Camera系统源码分析(4):Camera预览流程数据流
- Android 5.0 Camera系统源码分析(2):Camera打开流程
- android开发之源码级分析(系统启动流程 & Handler消息机制 & AsyncTask机制)
- 源码级分析Android系统启动流程
- Android系统启动流程源码分析
- 【源码分析】Android系统启动流程.
- Android系统启动流程分析之启动应用 - ActivityManagerService
- Android 8.0系统源码分析--startService启动过程源码分析
- [Android]Android系统启动流程源码分析
- [Android]Android系统启动流程源码分析
- Android 7.0 Camera架构源码分析1 - CameraService启动