图像基础、OpenCV入门3——图像灰度化、二值化与图像加噪
2017-07-20 08:44
387 查看
图像灰度化
方法1:求出每个像素点的RGB三个分量的平均值,然后将这个平均值赋予给这个像素的三个分量方法2:求RGB和YUV颜色空间的变化关系,建立亮度Y与RGB三个颜色分量的对应关系:Y=0.3R+0.59G+0.11B,以这个亮度值表达图像的灰度值。OpenCV的cvtColor函数,可以直接完成灰度化操作。
#-*- coding: utf-8 -*-
import cv2
import numpy as np
fn = "test1.jpg"
if __name__ == '__main__':
print('loading %s' % fn)
img = cv2.imread(fn)
sp = img.shape
print(sp)
# 获取图像大小
sz1 = sp[0]
sz2 = sp[1]
print('width:%d\nheight:%d' % (sz2,sz1))
# 创建一个窗口显示图像
cv2.namedWindow('img')
cv2.imshow('img',img)
# 复制图像矩阵,生成与源图像一样的图像,并显示
myimg2 = img.copy();
cv2.namedWindow('myimg2')
cv2.imshow('myimg2',myimg2)
# 复制并转换为灰度化图像并显示
myimg1 = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
cv2.namedWindow('myimg1')
cv2.imshow('myimg1',myimg1)
cv2.waitKey()
cv2.destroyAllWindows()
实际上RGB并不能反映图像的形态特征,只是从光学的原理蚝颜色的调配。把图像转换成8位的灰度值图像直接进行处理,可以通过直方图、灰度变化及正交变化之类数学运算对图像做进一步处理,比如说图像识别等。如果有必要,可将图像二值化,这样有利于对图像进一步处理,使图像数据量减小,突显出感兴趣的目标的轮廓。
图像二值化
#-*- coding: utf-8 -*-
import cv2
image = cv2.imread('test1.jpg')
image = cv2.cvtColor(image, cv2.COLOR_RGB2GRAY)
cv2.threshold(image, 140, 255, 0, image)
cv2.namedWindow("Image")
cv2.imshow("Image", image)
cv2.waitKey(0)
图像的二值化,就是将图像上的像素点的灰度值设置为0或255,也就是将整个图像呈现出明显的只有黑和白的视觉效果。
一幅图像包括目标物体、背景还有噪声,要想从多值的数字图像中直接提取出目标物体,常用的方法就是设定一个阈值T,用T将图像的数据分成两部分:大于T的像素群和小于T的像素群。这是研究灰度变换的最特殊的方法,称为图像的二值化(Binarization)。
Python-OpenCV中提供了阈值(threshold)函数:
cv2.threshold()
函数:
1. src 指原图像,原图像应该是灰度图。
2. x 指用来对像素值进行分类的阈值。
3. y 指当像素值高于(有时是小于)阈值时应该被赋予的新的像素值
4. Methods 指不同的阈值方法,这些方法包括:
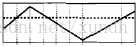
•cv2.THRESH_BINARY 图(1)

大于阈值的像素点的灰度值设定为最大值(如8位灰度值最大为255),灰度值小于阈值的像素点的灰度值设定为0。
•cv2.THRESH_BINARY_INV 图(2)

大于阈值的像素点的灰度值设定为0,而小于该阈值的设定为255。
•cv2.THRESH_TRUNC 图(3)

像素点的灰度值小于阈值不改变,大于阈值的灰度值的像素点就设定为该阈值。
•cv2.THRESH_TOZERO 图(4)

像素点的灰度值小于该阈值的不进行任何改变,而大于该阈值的部分,其灰度值全部变为0。
•cv2.THRESH_TOZERO_INV 图(5)

像素点的灰度值大于该阈值的不进行任何改变,像素点的灰度值小于该阈值的,其灰度值全部变为0。
参考:
http://blog.csdn.net/what_lei/article/details/49159655
图像加噪
#-*- coding: utf-8 -*-
import cv2
import numpy as np
img = cv2.imread('test1.jpg')
# 噪声点数量
coutn = 100000
for k in range(0,coutn):
# 获取图像噪声点的随机位置
xi = int(np.random.uniform(0,img.shape[1]))
xj = int(np.random.uniform(0,img.shape[0]))
#加噪
if img.ndim == 2:
# 灰度图像
img[xj,xi] = 255
elif img.ndim == 3:
# 非灰度图像,图像加噪
img[xj,xi,0] = 25
img[xj,xi,1] = 20
img[xj,xi,2] = 20
cv2.namedWindow('img')
cv2.imshow('img',img)
cv2.waitKey()
cv2.destroyAllWindows()

相关文章推荐
- 【OpenCV入门指南】第四篇 图像的二值化
- 图像基础、OpenCV入门1
- 【OpenCV入门指南】第四篇 图像的二值化
- 【OpenCV入门指南】第四篇 图像的二值化
- opencv图像的读入、灰度化、二值化、反色
- opencv简单的彩色图像灰度化和二值化(学习笔记)
- 【OpenCV入门指南】第四篇 图像的二值化
- opencv图像的读入、灰度化、二值化、反色
- 图像基础、OpenCV入门2——变亮、变暗、日落、水印等
- 【OpenCV入门指南】第四篇 图像的二值化
- 【OpenCV入门指南】第四篇 图像的二值化
- 【OpenCV入门指南】第四篇 图像的二值化
- 【OpenCV入门指南】第四篇 图像的二值化
- 入门OpenCV--图像的二值化
- 凡哥OpenCV基础入门教程(跳一跳专题)-CH2.3-几何图像绘制与文字绘制
- 图像处理(二)opencv处理图像二值化,灰度化等
- 【OpenCV入门指南】第四篇 图像的二值化
- 一些基本的opencv图像预处理函数直接用法(灰度化,otsu二值化,腐蚀膨胀,canny)
- opencv图像的读入、灰度化、二值化、反色
- opencv入门学习之四: 灰度图像的二值化