机器人操作系统(ROS)在线实训平台学习实验指南
2017-07-06 23:07
561 查看
机器人操作系统(ROS)在线学习指南
在高校开设ROS相关课程已经积累了一年多的经验,由于自动化类专业在课程安排中不同于计算机相关专业,通常没有Linux相关的课程基础,直接上手ROS较为困难,个人感觉计算机和人工智能联系更紧密一些,而自动化等更侧重机器人系统的相关软硬件集成。
在课程开设、备课和教学过程中,遇到了非常多的困难和问题,需要自身不断努力克服和改进,这样才能使课程不断完善。本科教育不同于职业教育,课程设计的本身也需要通识性,而非专业技术培训。目前,机器人工程专业在全国而言都属于比较新的本科专业。
在教材、课程规划等方面,国内并没有太多可借鉴的案例,只能向外求索,不断积累成长。本来以为提供了安装镜像和虚拟机能上新手在非常短的时间内入门ROS,最后发现如果经验积累不够,学习不够系统,遇到问题多茫然,为了进一步优化课程降低学习门槛,只需一台能上网的电脑就能学习ROS,终于发现了实验楼这个平台。
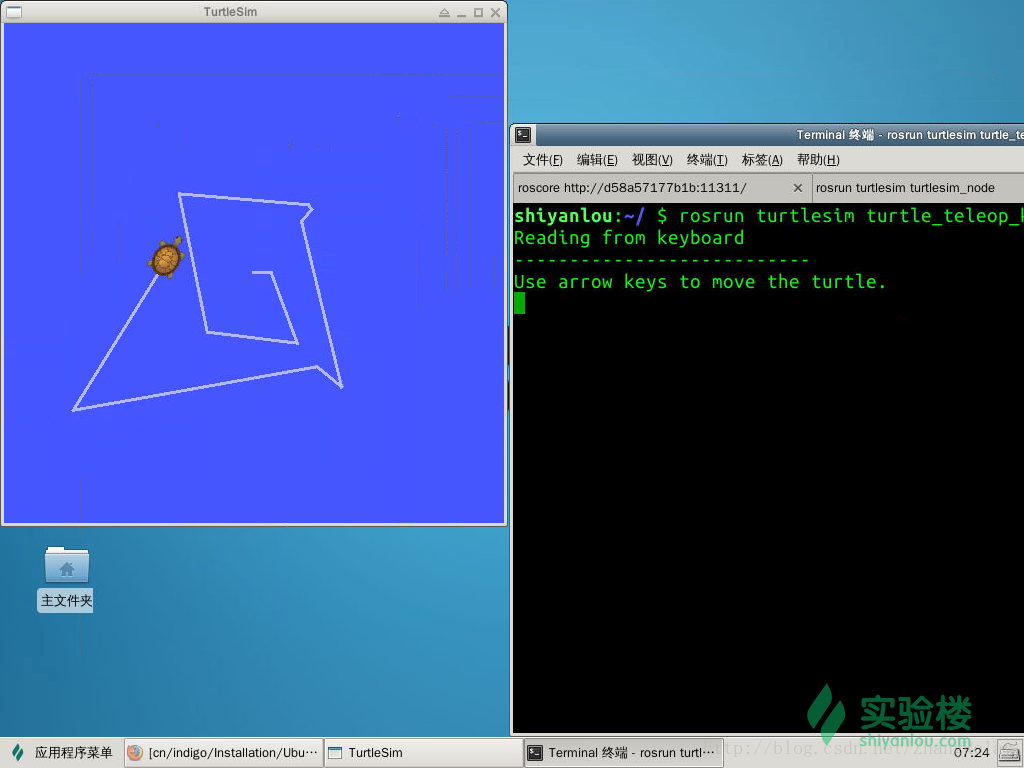
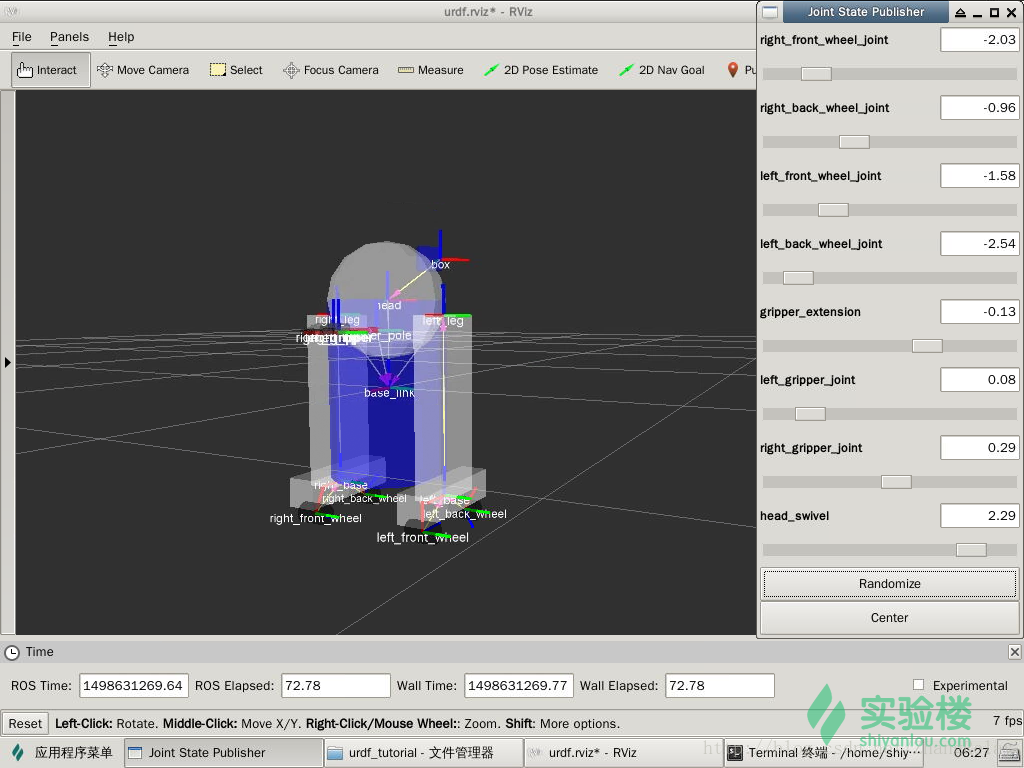
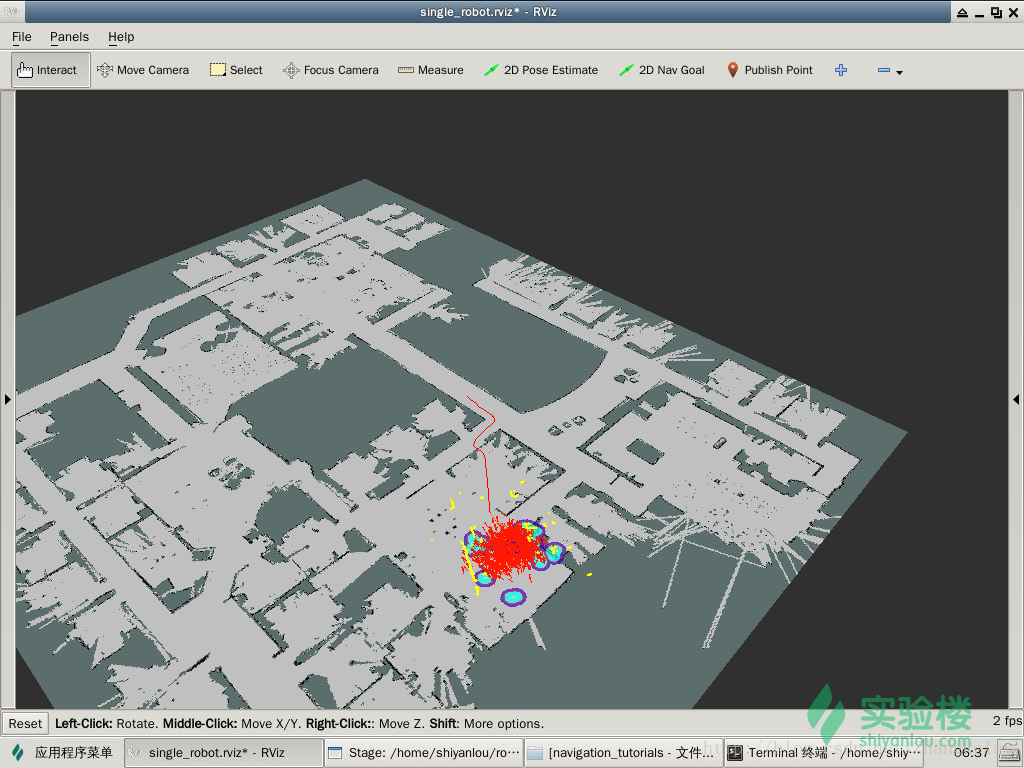
结合ROS官网、CSDN以及实验楼可以很系统的学习ROS了。课程目前已经公开,基于初级教程配置设计,但为了后期课程开设,配置了比较全面的官网功能包示例,让各位喜爱ROS的小伙伴能够边学边练。镜像已经安装配置好ROS了,可以直接使用。希望多提宝贵意见,会持续不断改进,并逐步增加进阶课程。官方示例的全部源码放在/opt/ros_ws/src/,在网页开启系统后,就可以直接进行ROS学习了。
ROS机器人操作系统的安装、配置与初级教程
课程网址:https://www.shiyanlou.com/courses/854
求支持,可以学习入门,也可以温故知新。提建议,帮改进,谢谢各位ROS小伙伴:-) :-) :-) :-)
特别提醒,入门学习并使用ROS需要具备一定的基础,请仔细参考附录提供的学习内容,进行全面系统的学习。
附录:
--系统学习和使用ROS,最好熟练掌握下列基础--
新手入门课程:
包括Linux基础入门,Vim编辑器,数据结构,C语言入门。
具体参考链接:https://www.shiyanlou.com/paths/newhand
当然还包括Git实战教程,GDB简明教程,跟我一起来玩转Makefile等。
具体参考链接:https://www.shiyanlou.com/paths/cpp
在高校开设ROS相关课程已经积累了一年多的经验,由于自动化类专业在课程安排中不同于计算机相关专业,通常没有Linux相关的课程基础,直接上手ROS较为困难,个人感觉计算机和人工智能联系更紧密一些,而自动化等更侧重机器人系统的相关软硬件集成。
在课程开设、备课和教学过程中,遇到了非常多的困难和问题,需要自身不断努力克服和改进,这样才能使课程不断完善。本科教育不同于职业教育,课程设计的本身也需要通识性,而非专业技术培训。目前,机器人工程专业在全国而言都属于比较新的本科专业。
在教材、课程规划等方面,国内并没有太多可借鉴的案例,只能向外求索,不断积累成长。本来以为提供了安装镜像和虚拟机能上新手在非常短的时间内入门ROS,最后发现如果经验积累不够,学习不够系统,遇到问题多茫然,为了进一步优化课程降低学习门槛,只需一台能上网的电脑就能学习ROS,终于发现了实验楼这个平台。
结合ROS官网、CSDN以及实验楼可以很系统的学习ROS了。课程目前已经公开,基于初级教程配置设计,但为了后期课程开设,配置了比较全面的官网功能包示例,让各位喜爱ROS的小伙伴能够边学边练。镜像已经安装配置好ROS了,可以直接使用。希望多提宝贵意见,会持续不断改进,并逐步增加进阶课程。官方示例的全部源码放在/opt/ros_ws/src/,在网页开启系统后,就可以直接进行ROS学习了。
ROS机器人操作系统的安装、配置与初级教程
课程网址:https://www.shiyanlou.com/courses/854
求支持,可以学习入门,也可以温故知新。提建议,帮改进,谢谢各位ROS小伙伴:-) :-) :-) :-)
特别提醒,入门学习并使用ROS需要具备一定的基础,请仔细参考附录提供的学习内容,进行全面系统的学习。
附录:
--系统学习和使用ROS,最好熟练掌握下列基础--
新手入门课程:
包括Linux基础入门,Vim编辑器,数据结构,C语言入门。
具体参考链接:https://www.shiyanlou.com/paths/newhand
当然还包括Git实战教程,GDB简明教程,跟我一起来玩转Makefile等。
具体参考链接:https://www.shiyanlou.com/paths/cpp

相关文章推荐
- “实验楼”提供在线linux实验环境,打造IT实训平台
- 机器人操作系统ROS Indigo 入门学习(17)——roswtf入门指南
- 机器人操作系统ROS Indigo 入门学习(17)——roswtf入门指南
- 用ROS来做无人测试平台系列之ROS学习-3-差速控制
- 机器人操作系统ROS Indigo 入门学习(2)——安装和配置你的ROS环境
- 机器人操作系统ROS Indigo 入门学习(7)——理解ROS Topic
- 机器人操作系统ROS Indigo 入门学习(13)——验证简单的发布者和订阅者
- 机器人操作系统ROS Indigo 入门学习(13)——验证简单的发布者和订阅者
- 手机开发平台的学习指南、教程和资料总结
- 深度学习指南:在iOS平台上使用TensorFlow
- 机器人操作系统ROS Indigo 入门学习(7)——理解ROS Topic
- 机器人操作系统ROS Indigo 入门学习(16)——记录和重放数据
- 基于IMOOC强力django+杀手级xadmin 打造上线标准的在线教育平台课程的学习(10)——Organization models.py的设计
- 基于IMOOC强力django+杀手级xadmin 打造上线标准的在线教育平台课程的学习(13)——xadmin介绍
- 基于IMOOC强力django+杀手级xadmin 打造上线标准的在线教育平台课程的学习(14)——各个App的adminx.py的设置
- 机器人操作系统ROS Indigo 入门学习(5)——编译一个ROS Package
- 机器人操作系统(ROS)浅析-学习笔记
- 网络安全实验平台 - Windows下DVWA安装指南
- 用ROS来做无人测试平台系列之ROS学习-2-tf
- 机器人操作系统ROS Indigo 入门学习(8)——理解ROS service 和parameter