CUDA入门学习(三):共享内存与线程同步
2017-06-18 09:17
507 查看
共享内存实际上是可受用户控制的一级缓存。每个SM中的一级缓存与共享内存共享一个64KB的内存段在开普勒架构的设备中,根据应用程序的需要,每个线程块可以配置为16KB的一级缓存或共享内存。而在费米架构的设备中,可以根据喜好选择16KB或者48KB的一级缓存或者共享内存。早期费米架构中只有固定的16KB共享内存而没有一级缓存。共享内存的延迟极低,大约有1.5TB/s的带宽,远远高于全局内存的190GB/s,但是它的速度只有寄存器的十分之一。只有当数据重复利用,全局内存合并,或线程之间由数据共享时使用共享内存才更合适,否则,数据直接从全局内存加载到寄存器性能会更好。申请共享内存后,其内容在每一个用到的block被复制一遍,使得在每个block内,每一个thread都可以访问和操作这块内存,而无法访问其他block内的共享内存。这种机制就使得一个block之内的所有线程可以互相交流和合作。
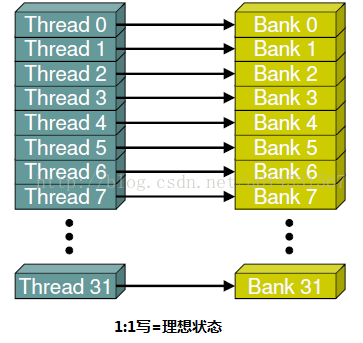
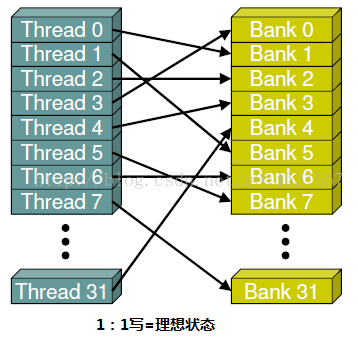
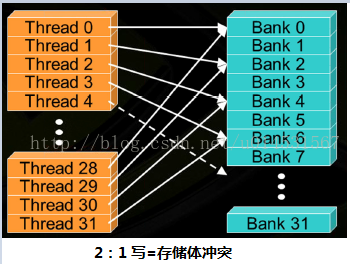
共享内存是基于存储体切换的架构(bank-switched architecture)。无论有多少个线程发起操作,每个存储体每个周期只执行一次操作。因此,如果线程束中的每个线程访问一个存储体,那么所有的线程操作都可以在一个周期内同时执行。此时无须顺序地访问,因为每个线程访问的存储体在共享内存中都是独立的,互不影响。此外,如果线程束中的所有线程同时访问相同地址的存储体时,就会想常量内存一样触发一个广播机制到线程束中的每一个线程。然而如果有其他的访问方式,存储体冲突将不同程度地得到解决。这意味着,线程访问共享内存需要排队等候,当一个线程访问时,其它线程都将阻塞。因此储存体应尽可能避免冲突。
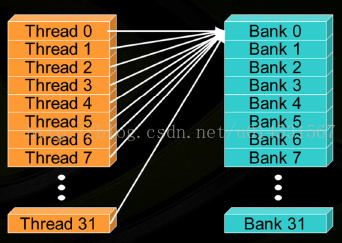
这里有必要对第四张图说明下。所有线程访问同一存储体,如果是读的话会触发广播机制,但是如果是写的话会冲突,这将导致对同一存储体顺序进行32次访问操作,这里注意箭头朝向,该图是参考博文https://segmentfault.com/a/1190000007533157,但是可能博主没考虑到读写的区别吧,如有问题,欢迎指正修改。
我们来看个向量点乘的例子吧。
#include "../common/book.h"
#define imin(a,b) (a<b?a:b)
const int N = 33 * 1024;
const int threadsPerBlock = 256;
const int blocksPerGrid =
imin( 32, (N+threadsPerBlock-1) / threadsPerBlock );
__global__ void dot( float *a, float *b, float *c ) {
__shared__ float cache[threadsPerBlock];
int tid = threadIdx.x + blockIdx.x * blockDim.x;
int cacheIndex = threadIdx.x;
float temp = 0;
while (tid < N) {
temp += a[tid] * b[tid];
tid += blockDim.x * gridDim.x;
}
// set the cache values
cache[cacheIndex] = temp;
// synchronize threads in this block
__syncthreads();
// for reductions, threadsPerBlock must be a power of 2
// because of the following code
int i = blockDim.x/2;
while (i != 0) {
if (cacheIndex < i)
cache[cacheIndex] += cache[cacheIndex + i];
__syncthreads();
i /= 2;
}
if (cacheIndex == 0)
c[blockIdx.x] = cache[0];
}
int main( void ) {
float *a, *b, c, *partial_c;
float *dev_a, *dev_b, *dev_partial_c;
// allocate memory on the cpu side
a = (float*)malloc( N*sizeof(float) );
b = (float*)malloc( N*sizeof(float) );
partial_c = (float*)malloc( blocksPerGrid*sizeof(float) );
// allocate the memory on the GPU
HANDLE_ERROR( cudaMalloc( (void**)&dev_a,
N*sizeof(float) ) );
HANDLE_ERROR( cudaMalloc( (void**)&dev_b,
N*sizeof(float) ) );
HANDLE_ERROR( cudaMalloc( (void**)&dev_partial_c,
blocksPerGrid*sizeof(float) ) );
// fill in the host memory with data
for (int i=0; i<N; i++) {
a[i] = i;
b[i] = i*2;
}
// copy the arrays 'a' and 'b' to the GPU
HANDLE_ERROR( cudaMemcpy( dev_a, a, N*sizeof(float),
cudaMemcpyHostToDevice ) );
HANDLE_ERROR( cudaMemcpy( dev_b, b, N*sizeof(float),
cudaMemcpyHostToDevice ) );
dot<<<blocksPerGrid,threadsPerBlock>>>( dev_a, dev_b,
dev_partial_c );
// copy the array 'c' back from the GPU to the CPU
HANDLE_ERROR( cudaMemcpy( partial_c, dev_partial_c,
blocksPerGrid*sizeof(float),
cudaMemcpyDeviceToHost ) );
// finish up on the CPU side
c = 0;
for (int i=0; i<blocksPerGrid; i++) {
c += partial_c[i];
}
#define sum_squares(x) (x*(x+1)*(2*x+1)/6)
printf( "Does GPU value %.6g = %.6g?\n", c,
2 * sum_squares( (float)(N - 1) ) );
// free memory on the gpu side
HANDLE_ERROR( cudaFree( dev_a ) );
HANDLE_ERROR( cudaFree( dev_b ) );
HANDLE_ERROR( cudaFree( dev_partial_c ) );
// free memory on the cpu side
free( a );
free( b );
free( partial_c );
}
主函数中的CUDA 内存申请,拷贝,释放我们就不具体介绍了,我们看核函数中的__shared__ float cache[threadsPerBlock] 这里的__shared__同样是CUDA中的关键字,和__global__一样,意思是申请一个共享内存,这里申请的大小为每个线程块的线程数目,这样每个线程都可以访问一个存储体,不会造成存储体冲突。并且会为每一个线程块分配相同大小的共享内存。这样我们就可以计算每个线程块的向量点乘之和,但是这里有个潜在的危险,如下图所示,如果一部分线程已经计算好了,另一部分还没,那么相加的结果肯定是错的。所以我们需要一个同步机制来保证每个线程块都计算好了,这里就用到了__syncthreads();


总结:本次主要介绍了块内线程如何通过共享内存进行协作,除了线程级通信之外,我们之后还将学校线程块之间的通信。
参考: [1]CUDA并行程序设计 —— GPU编程指南
[2] Addison.Wesley.CUDA.By.Example.Jul.2010.ISBN.0131387685
[3]https://segmentfault.com/a/1190000007533157
共享内存是基于存储体切换的架构(bank-switched architecture)。无论有多少个线程发起操作,每个存储体每个周期只执行一次操作。因此,如果线程束中的每个线程访问一个存储体,那么所有的线程操作都可以在一个周期内同时执行。此时无须顺序地访问,因为每个线程访问的存储体在共享内存中都是独立的,互不影响。此外,如果线程束中的所有线程同时访问相同地址的存储体时,就会想常量内存一样触发一个广播机制到线程束中的每一个线程。然而如果有其他的访问方式,存储体冲突将不同程度地得到解决。这意味着,线程访问共享内存需要排队等候,当一个线程访问时,其它线程都将阻塞。因此储存体应尽可能避免冲突。
这里有必要对第四张图说明下。所有线程访问同一存储体,如果是读的话会触发广播机制,但是如果是写的话会冲突,这将导致对同一存储体顺序进行32次访问操作,这里注意箭头朝向,该图是参考博文https://segmentfault.com/a/1190000007533157,但是可能博主没考虑到读写的区别吧,如有问题,欢迎指正修改。
我们来看个向量点乘的例子吧。
#include "../common/book.h"
#define imin(a,b) (a<b?a:b)
const int N = 33 * 1024;
const int threadsPerBlock = 256;
const int blocksPerGrid =
imin( 32, (N+threadsPerBlock-1) / threadsPerBlock );
__global__ void dot( float *a, float *b, float *c ) {
__shared__ float cache[threadsPerBlock];
int tid = threadIdx.x + blockIdx.x * blockDim.x;
int cacheIndex = threadIdx.x;
float temp = 0;
while (tid < N) {
temp += a[tid] * b[tid];
tid += blockDim.x * gridDim.x;
}
// set the cache values
cache[cacheIndex] = temp;
// synchronize threads in this block
__syncthreads();
// for reductions, threadsPerBlock must be a power of 2
// because of the following code
int i = blockDim.x/2;
while (i != 0) {
if (cacheIndex < i)
cache[cacheIndex] += cache[cacheIndex + i];
__syncthreads();
i /= 2;
}
if (cacheIndex == 0)
c[blockIdx.x] = cache[0];
}
int main( void ) {
float *a, *b, c, *partial_c;
float *dev_a, *dev_b, *dev_partial_c;
// allocate memory on the cpu side
a = (float*)malloc( N*sizeof(float) );
b = (float*)malloc( N*sizeof(float) );
partial_c = (float*)malloc( blocksPerGrid*sizeof(float) );
// allocate the memory on the GPU
HANDLE_ERROR( cudaMalloc( (void**)&dev_a,
N*sizeof(float) ) );
HANDLE_ERROR( cudaMalloc( (void**)&dev_b,
N*sizeof(float) ) );
HANDLE_ERROR( cudaMalloc( (void**)&dev_partial_c,
blocksPerGrid*sizeof(float) ) );
// fill in the host memory with data
for (int i=0; i<N; i++) {
a[i] = i;
b[i] = i*2;
}
// copy the arrays 'a' and 'b' to the GPU
HANDLE_ERROR( cudaMemcpy( dev_a, a, N*sizeof(float),
cudaMemcpyHostToDevice ) );
HANDLE_ERROR( cudaMemcpy( dev_b, b, N*sizeof(float),
cudaMemcpyHostToDevice ) );
dot<<<blocksPerGrid,threadsPerBlock>>>( dev_a, dev_b,
dev_partial_c );
// copy the array 'c' back from the GPU to the CPU
HANDLE_ERROR( cudaMemcpy( partial_c, dev_partial_c,
blocksPerGrid*sizeof(float),
cudaMemcpyDeviceToHost ) );
// finish up on the CPU side
c = 0;
for (int i=0; i<blocksPerGrid; i++) {
c += partial_c[i];
}
#define sum_squares(x) (x*(x+1)*(2*x+1)/6)
printf( "Does GPU value %.6g = %.6g?\n", c,
2 * sum_squares( (float)(N - 1) ) );
// free memory on the gpu side
HANDLE_ERROR( cudaFree( dev_a ) );
HANDLE_ERROR( cudaFree( dev_b ) );
HANDLE_ERROR( cudaFree( dev_partial_c ) );
// free memory on the cpu side
free( a );
free( b );
free( partial_c );
}
主函数中的CUDA 内存申请,拷贝,释放我们就不具体介绍了,我们看核函数中的__shared__ float cache[threadsPerBlock] 这里的__shared__同样是CUDA中的关键字,和__global__一样,意思是申请一个共享内存,这里申请的大小为每个线程块的线程数目,这样每个线程都可以访问一个存储体,不会造成存储体冲突。并且会为每一个线程块分配相同大小的共享内存。这样我们就可以计算每个线程块的向量点乘之和,但是这里有个潜在的危险,如下图所示,如果一部分线程已经计算好了,另一部分还没,那么相加的结果肯定是错的。所以我们需要一个同步机制来保证每个线程块都计算好了,这里就用到了__syncthreads();
总结:本次主要介绍了块内线程如何通过共享内存进行协作,除了线程级通信之外,我们之后还将学校线程块之间的通信。
参考: [1]CUDA并行程序设计 —— GPU编程指南
[2] Addison.Wesley.CUDA.By.Example.Jul.2010.ISBN.0131387685
[3]https://segmentfault.com/a/1190000007533157

相关文章推荐
- CUDA 学习(十一)、共享内存
- 共享内存IPC入门学习
- cuda学习3-共享内存和同步
- UNIX/LINUX编程学习之进程通信--共享内存
- 寄存器(内存访问)05 - 零基础入门学习汇编语言17
- UNIX环境高级编程学习之第十五章进程间通信 - 系统V 共享内存使用(使用信号灯保护共享内存)
- 寄存器(内存访问)01 - 零基础入门学习汇编语言13
- 共享内存学习小结(一)
- Android系统匿名共享内存Ashmem(Anonymous Shared Memory)简要介绍和学习计划
- 寄存器(内存访问)04 - 零基础入门学习汇编语言16
- 寄存器(内存访问)05 - 零基础入门学习汇编语言17
- 寄存器(内存访问)07 - 零基础入门学习汇编语言19
- c++入门学习(内存与指针及数组)
- 嵌入式linux的学习笔记-共享内存(六)
- LINUX学习之路---入门篇---如何在VM中与主机共享上网
- 寄存器(内存访问)06 - 零基础入门学习汇编语言18
- linux c语言学习笔记之IPC-共享内存
- Unix System V共享内存学习笔记(共享内存、信号量)
- 寄存器(内存访问)02 - 零基础入门学习汇编语言14
- 寄存器(内存访问)07 - 零基础入门学习汇编语言19