An Introduction to CNN based Object Detection
2017-06-14 21:58
423 查看
1. Content
Brief Revisit to the “Ancient” Algorithm
HOG (before *2007)DPM (*2010~2014)
Epochal Evolution of R-CNN
R-CNN *2014Fast-RCNN *2015
Faster-RCNN *2015
Efficient One-shot Methods
YOLOSSD
Others
2. Brief Revisit to the “Ancient” Algorithm
2.1 Histograms of Gradients (HOG)
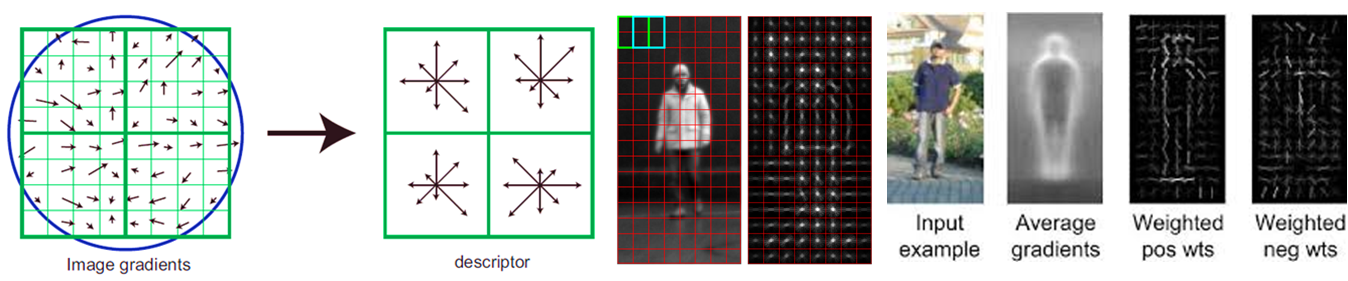
Calculate gradient for each pixel
For each Cell, a histogram of gradient is computed
For each Block, a HOG feature is extracted by concatenating histograms of each Cell
If Block size = 16*16, Block stride = 8, Cell size = 8*8, Bin size = 9, Slide-window size = 128*64, then HOG feature is a 3780-d feature. #Block=((64-16)/8+1)*((128-16)/8+1)=105, #Cell=(16/8)*(16/8)=4, 105*4*9=3780
2.2 Deformable Part Models (DPM)
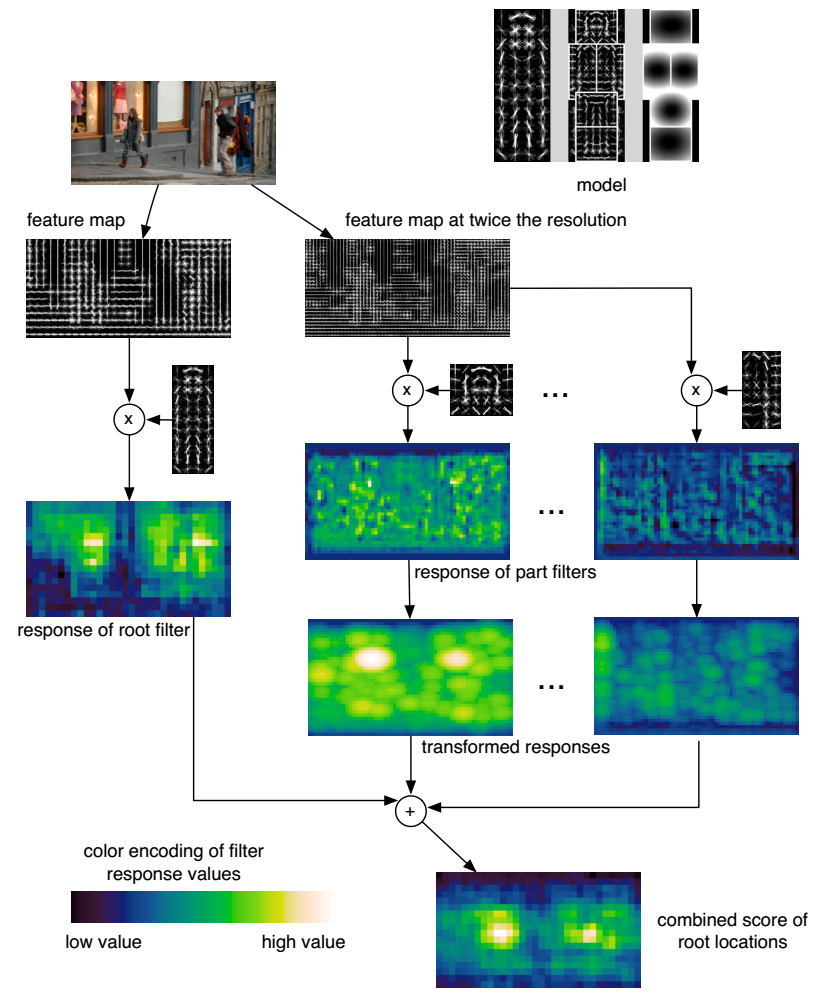
Di,l(x,y)=maxdx,dy(Ri,l(x+dx,y+dy)−di⋅ϕd(dx,dy))
This transformation spreads high filter scores to nearby locations, taking into account the deformation costs.
score(x0,y0,l0)=R−0,l0(x0,y0)+∑i=1nDi,l0−λ(2(x0,y0)+vi)+b
The overall root scores at each level can be expressed by the sum of the root filter response at that level, plus shifted versions of transformed and sub-sampled part responses.
3. Epochal Evolution of R-CNN
3.1 RCNN
3.1.1 Regions with CNN Features
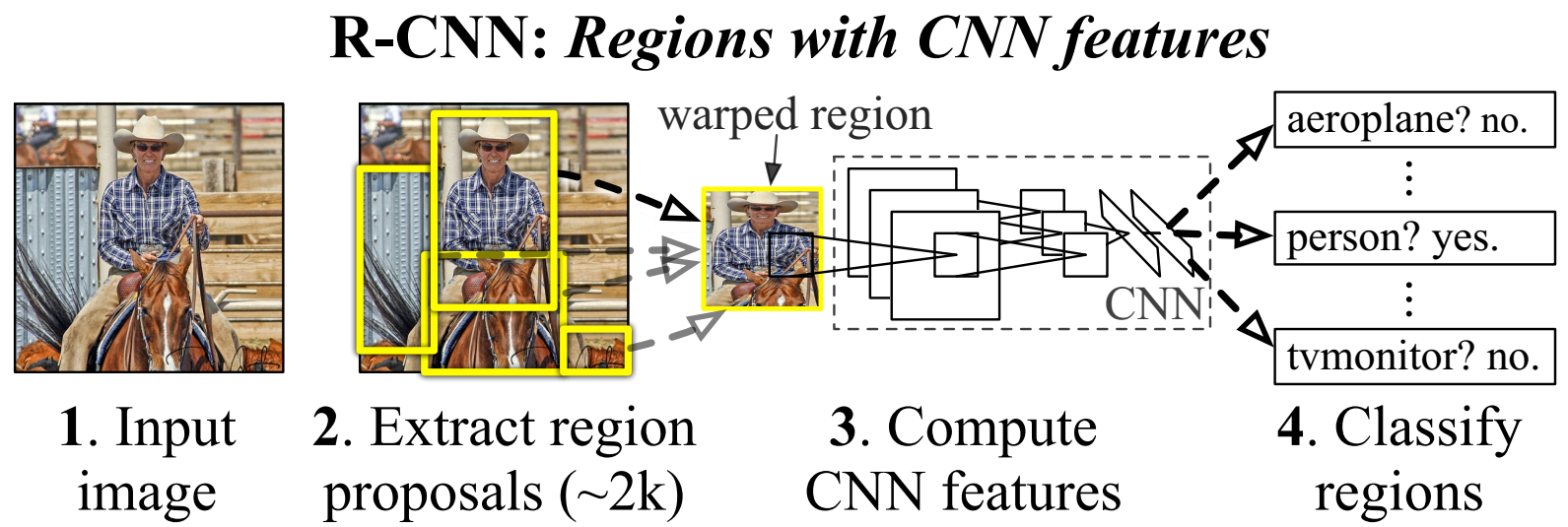
Region proposals (Selective Search, ~2k)
CNN features (AlexNet, VGG-16, warped region in image)
Classifier (Linear SVM per class)
Bounding box (Class-specific regressor)
Run-time speed (VGG-16, 47 s/img on single K40 GPU)
3.1.2 Experiment Result (AlexNet)
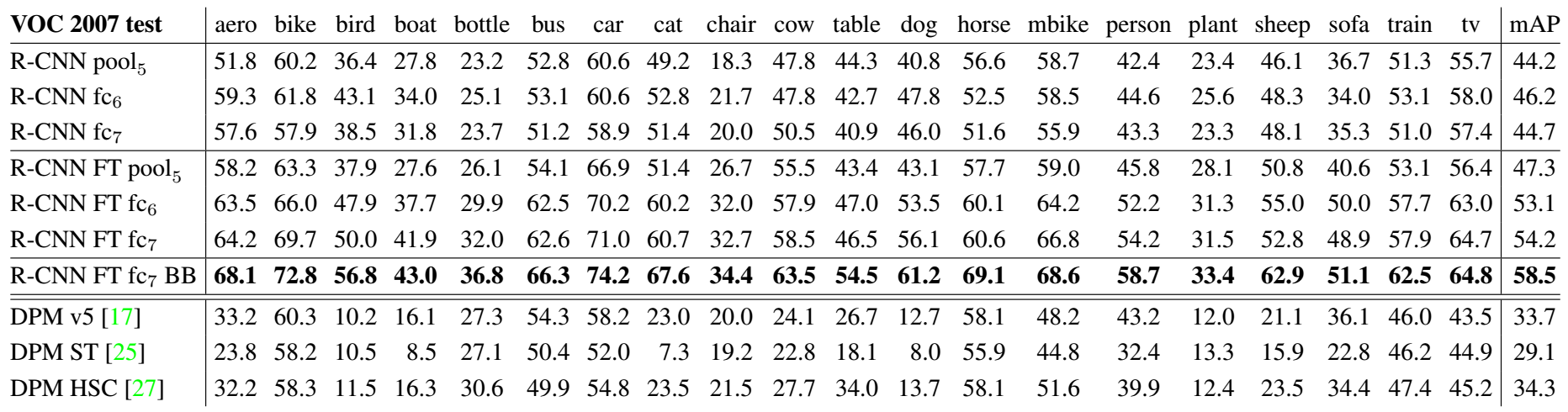
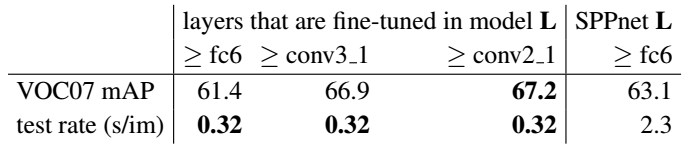
Without FT, fc7 is worse than fc6, pool5 is quite competitive. Much of the CNN’s representational power comes from its convolutional layers, rather than from the much larger densely connected layers.
With FT, The boost from fine-tuning is much larger for fc6 and fc7 than for pool5. Pool5 features are general. Learning domain-specific non-linear classifiers helps a lot.
Bounding box regression helps reduce localization errors.
3.1.3 Interesting Details – Training
Pre-trained on ILSVRC2012 classification taskFine-tuned on proposals with N+1 classes without any modification to the network
IOU>0.5 over ground-truth as positive samples, others as negative samples
Each mini-batch contains 32 positive samples and 96 background samples
SVM for each category
Ground-truth window as positive samples
IOU<0.3 over ground-truth as negative samples
Hard negative mining is adopted
Bounding-box regression
Class-specific
Features computed by CNN
Only the proposals IOU>0.6 overlap ground-truth
Coordinates in pixel
3.1.4 Interesting Details – FP Error Types
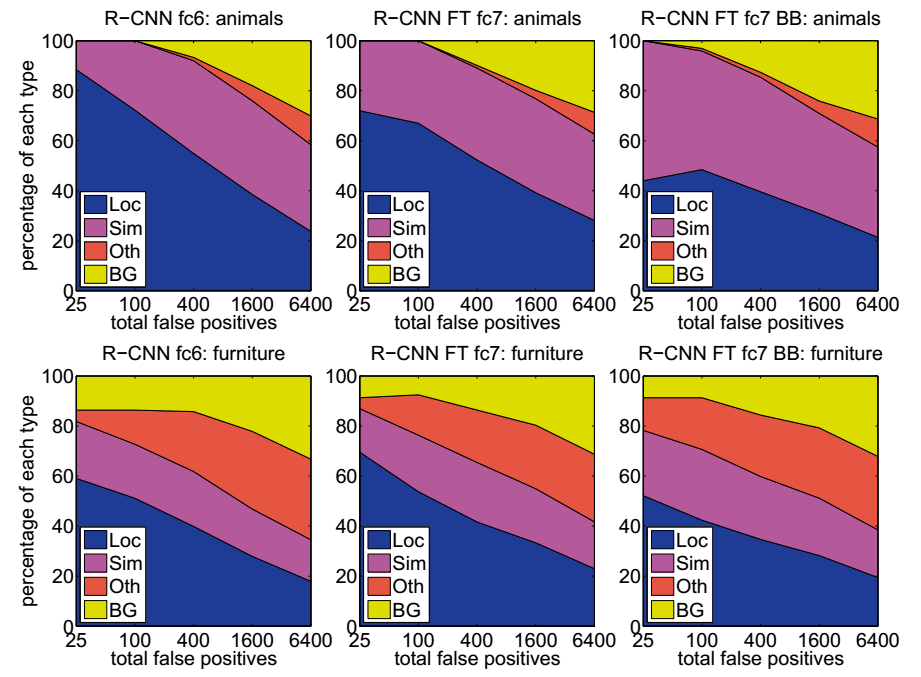
Loc: poor localization, 0.1 < IOU < 0.5
Sim: confusion with a similar category
Oth: confusion with a dissimilar object category
BG: a FP that fired on background
3.2 Fast-RCNN
3.2.1 What’s Wrong with RCNN
Training is a multi-stage pipeline (Proposal, Fine-tune, SVMs, Regressors)Training is expensive in space and time (Extract feature from every proposal, Need to save to disk)
Oject detection is slow (47 s/img on K40)
3.2.2 R-CNN with ROI Pooling
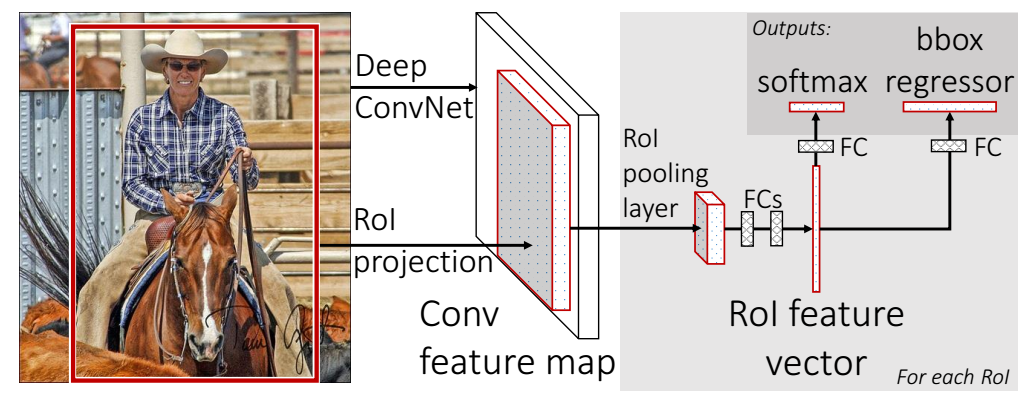
Region proposals (Selective Search, ~2k)
CNN features (AlexNet, VGG-16, ROI in feature map)
Classifier (sub-network softmax)
Bounding box (sub-network regressor)
Run-time speed (VGG-16, 0.32 s/img on single K40 GPU)
3.2.3 ROI Pooling
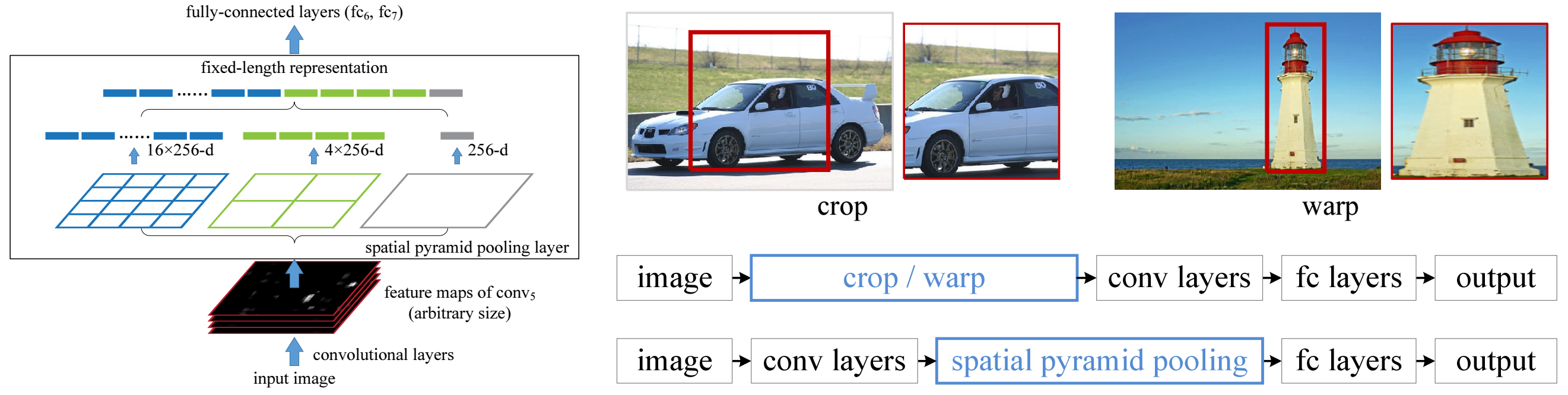
Inspired by Spatial Pyramid Pooling (SPPNet)
Convert arbitrary input size to fixed length
The input is an ROI area in feature map
The input is divided into grids
In each grid, pooling is used to extract features
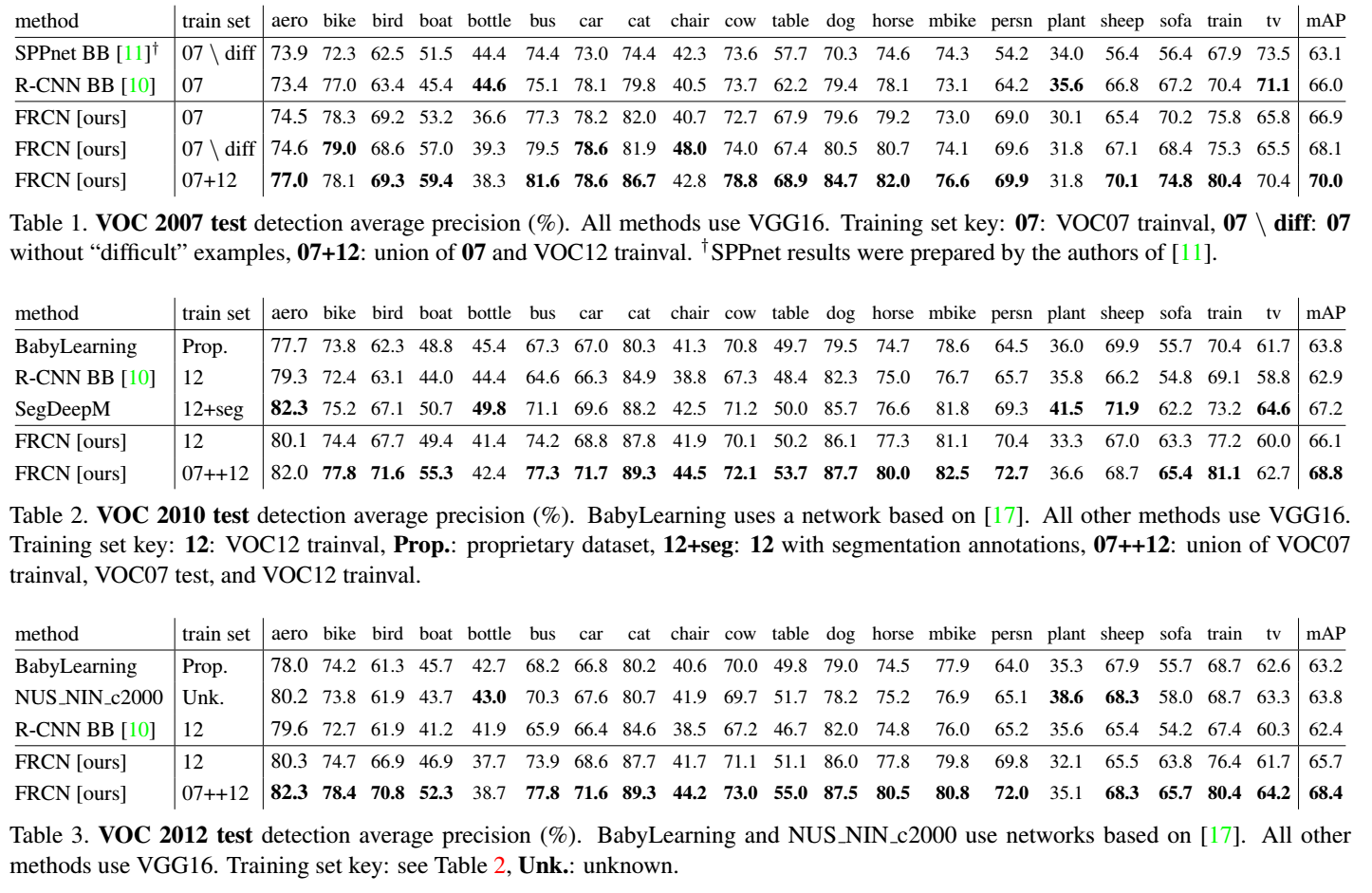
3.2.4 Experiment Result (VGG16)
3.2.5 Interesting Details – Training
Pre-trained on ILSVRC2012 classification taskFine-tuned with N+1 classes and two sibling layers
Fine-tune the whole network
Each mini-batch has 2 images and 64 ROIs from each images
25% of the ROIs have IOU>0.5 with ground-truth as positive samples
The rest of the ROIs have IOU [0.1, 0.5) with ground-truth as background samples
L(p,u,lu,v)=Lcls(p,u)+λ[u≥1]Lloc(tu,v)
Multi-task loss, one loss for classification and one for bounding box regression
ROI pooling back-propagation is similar with max-pooling
Accelerate using truncated SVD
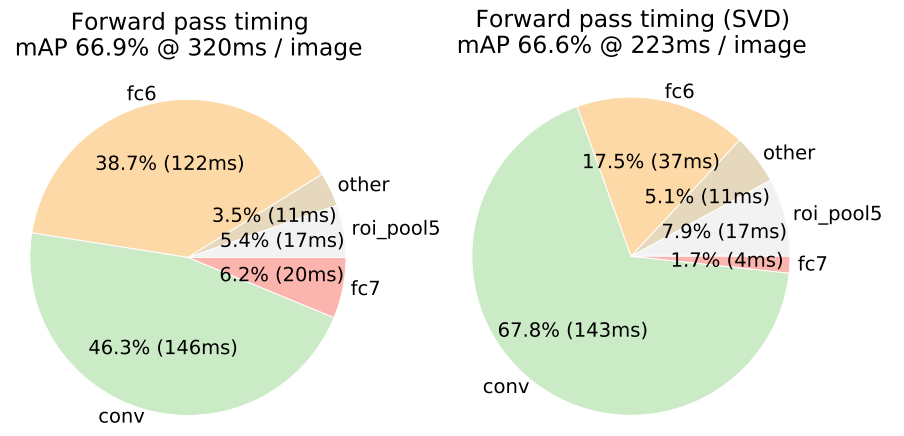
Implemented by using two FCs without non-linear activation
Training time
146x faster than R-CNN
If accelerated with truncated SVD, 213x faster than R-CNN
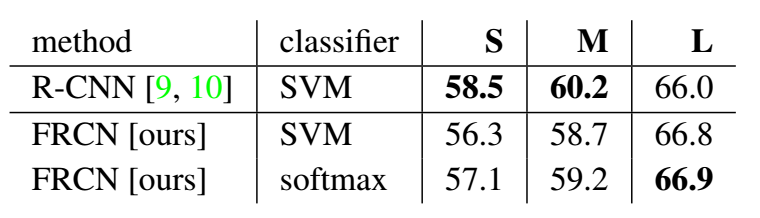
3.2.6 Interesting Details – Design evaluation
Does multi-task training help? Yes, it does!
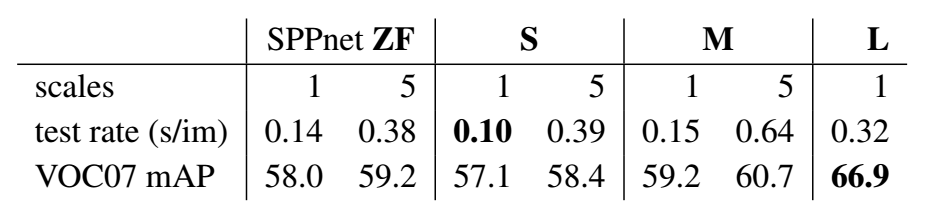
Test with multiple scales? Yes but with cost.
Do SVMs outperform softmax? Interesting…
3.3 Faster-RCNN
3.3.1 Room to improve Fast-RCNN
Region proposal has become the bottleneck2s for Selective Search, 0.320s for Fast-RCNN
Why not a unified end-to-end framework
3.3.2 Fast-RCNN with RPN (Region Proposal Network)
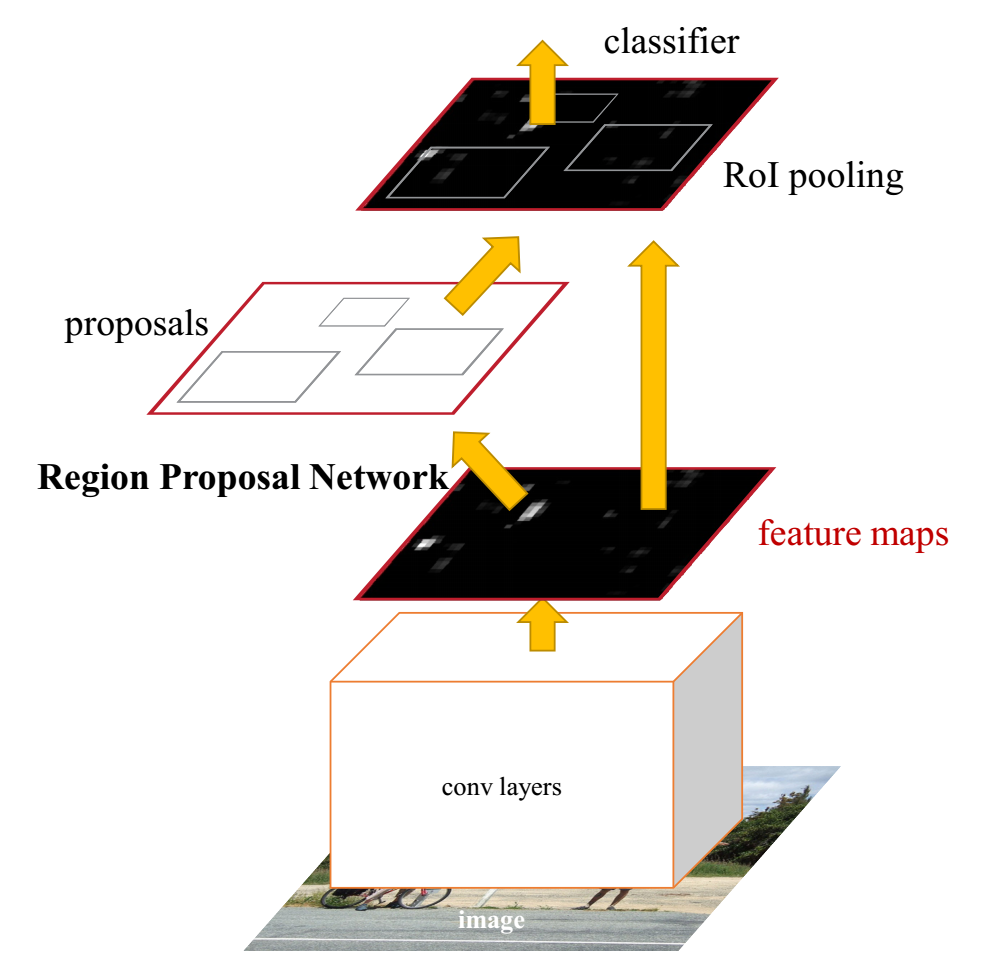
Region proposals (RPN, ~300)
Classifier (sub-network softmax)
Bounding box (RPN regressor, sub-network regressor)
Run-time speed (VGG-16, 0.198 s/img on single K40 GPU)
3.3.3 Region Proposal Network
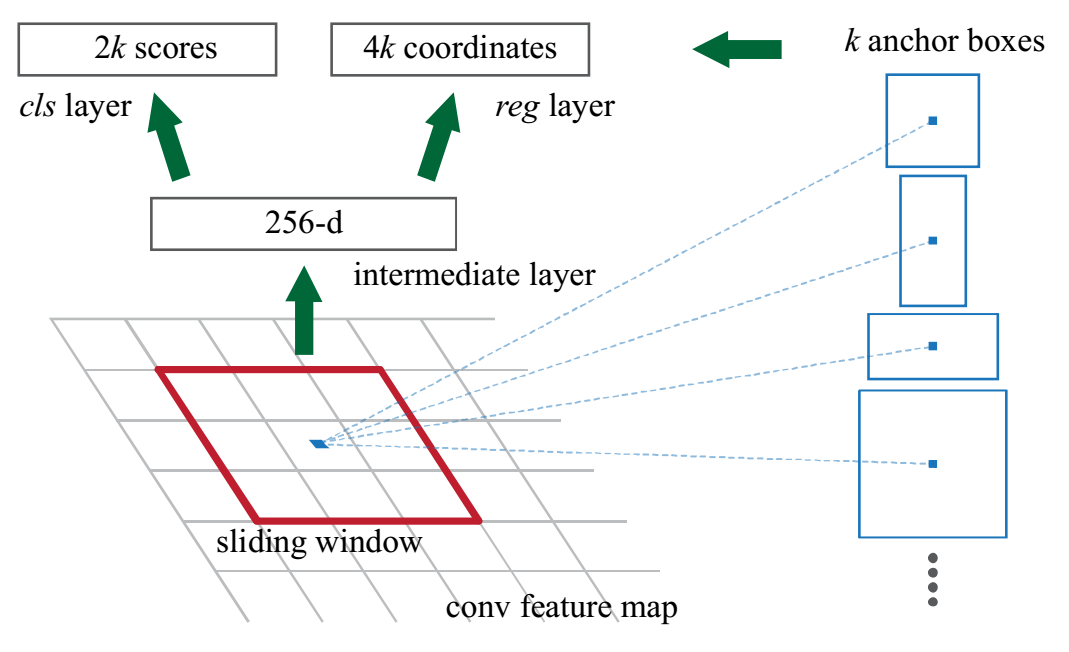
Anchors
reference box, prior box, default box
Works in a slide-window way
Implemented by 3*3 kernel convolution
Centered at the slide-window
Translation-Invariant
If objects translated, proposal should be translated
Translated along slide-window
Multi-Scale and Multi-Ratio
A pyramid of anchors
A set of different ratios
Relies on single scale feature map
Objectness and Localization
Two siblings
Objectness score
Bounding box regression
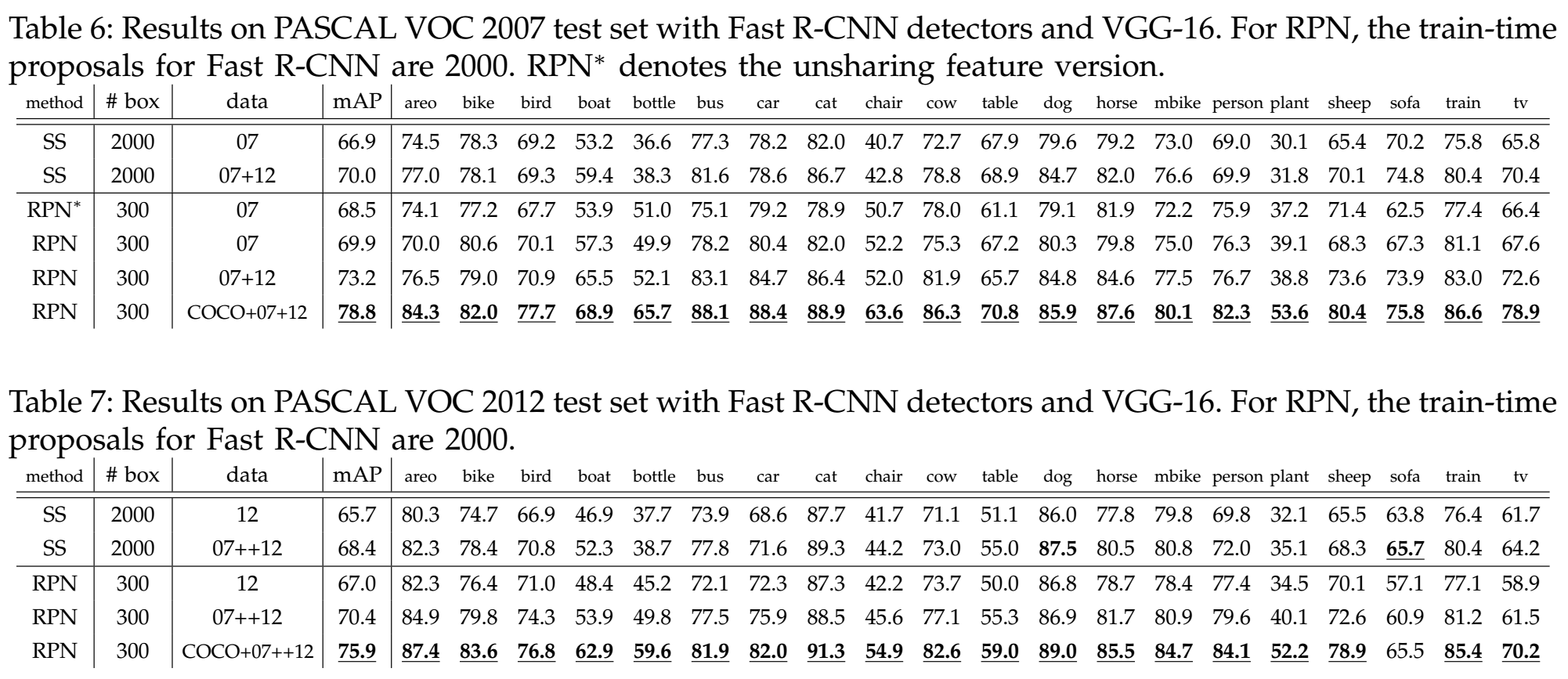
3.3.4 Experiment Result
3.3.5 Interesting Details – Training
Sharing Features for RPN and Fast-RCNNAlternating training
Approximate joint training
Non-approximate joint training
Alternating Training
Train RPN(@) using pre-trained model
Train Fast-RCNN(#) using pre-trained model and @’s proposal
Train RPN($) using #’s weight with shared layers fixed
Train Fast-RCNN using $’s proposal with shared layers fixed
Training RPN
Each mini-batch arises from a single image
Positive samples: the anchors with (1) the highest IOU and (2) IOU>0.7 overlap with any ground-truth
Negative samples: IOU<0.3 overlap with all ground-truth
Randomly sample 256 anchors, pos:neg = 1:1
Loss function with Ncls=256, Nreg=~2400, λ=10
Anchors cross image boundaries do not contribute at training stage
3.3.6 Interesting Details – Design Evaluation
Ablation on RPN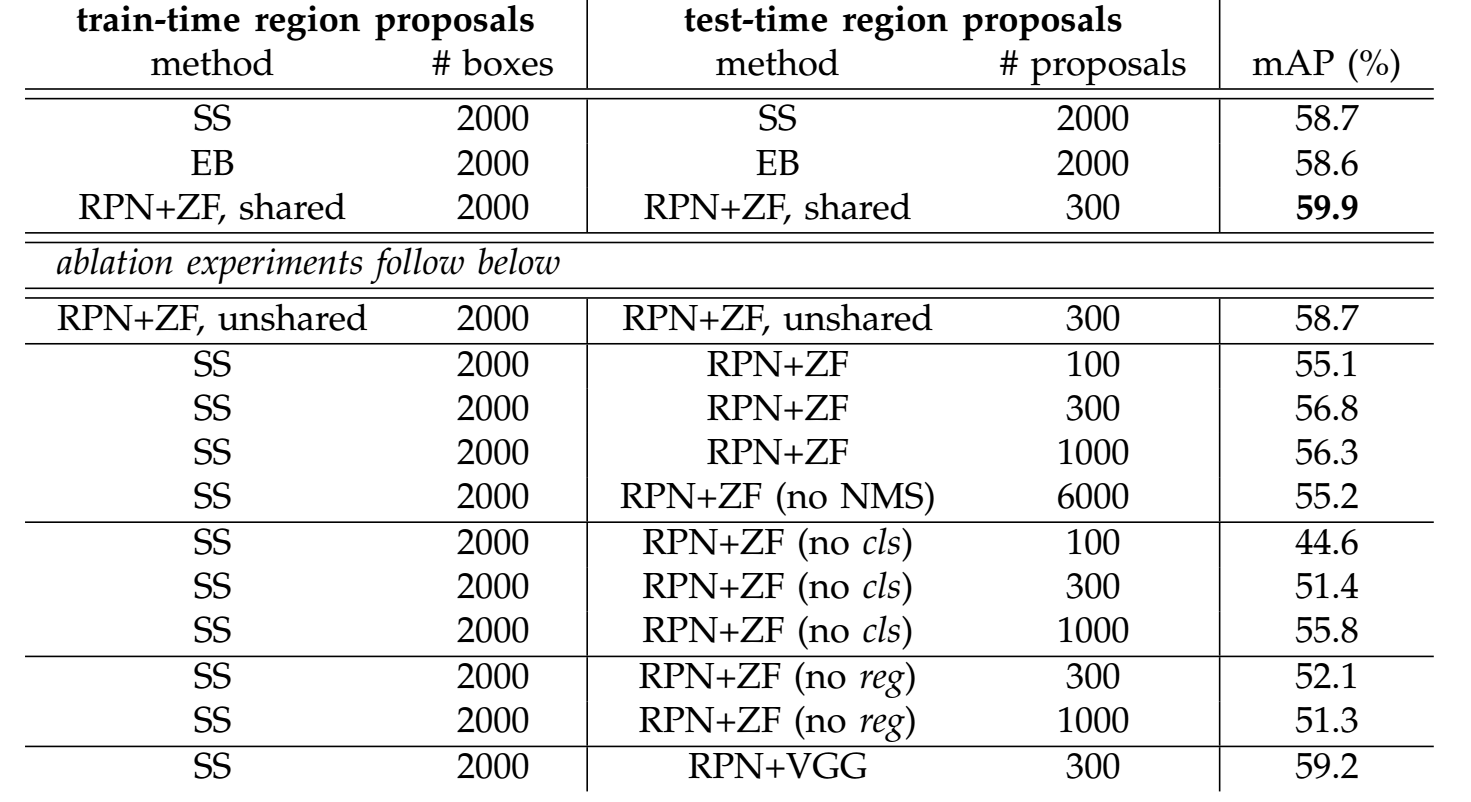
Sharing: Detector feature helps RPN
RPN generate quite good proposals
No cls, randomly selecting proposal, score matters
No reg, worse localization error
Timing

Nearly cost free
Less proposal
Anchors
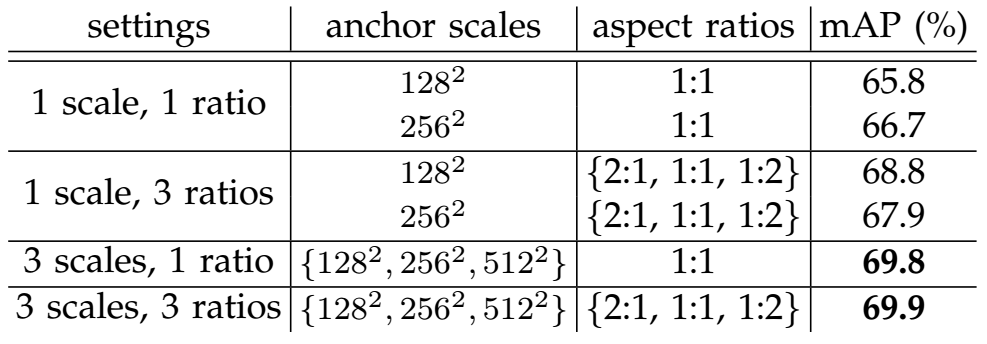
Scale is more effective
4 Efficient One-shot Methods
4.1 YOLO
4.1.1 You Only Look Once
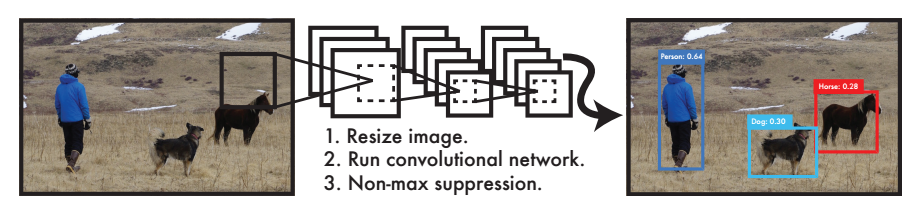
A simple forward on the full image (almost same with a classification task)
Frame object detection as a regression problem (bounding box coordinates, class probabilities)
Extremely fast (45 fps for base network, or 150 fps for fast version)
Reasoning globally on the full context (no slide-window or region proposals)
Generalizable representations of objects (stable from natural images to artwork)
4.1.2 Unified Detection
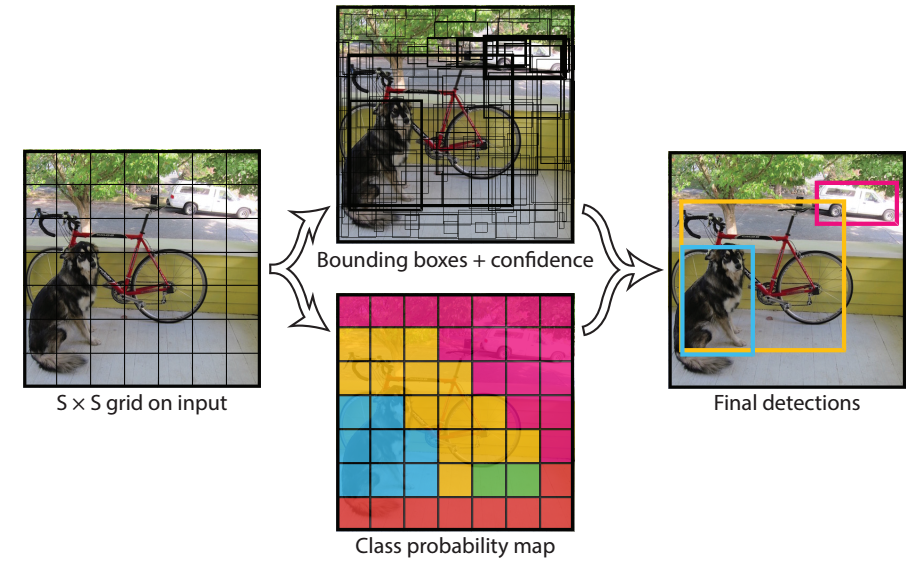
The input is divided into S x S grid
Each grid cell predicts B bounding boxes
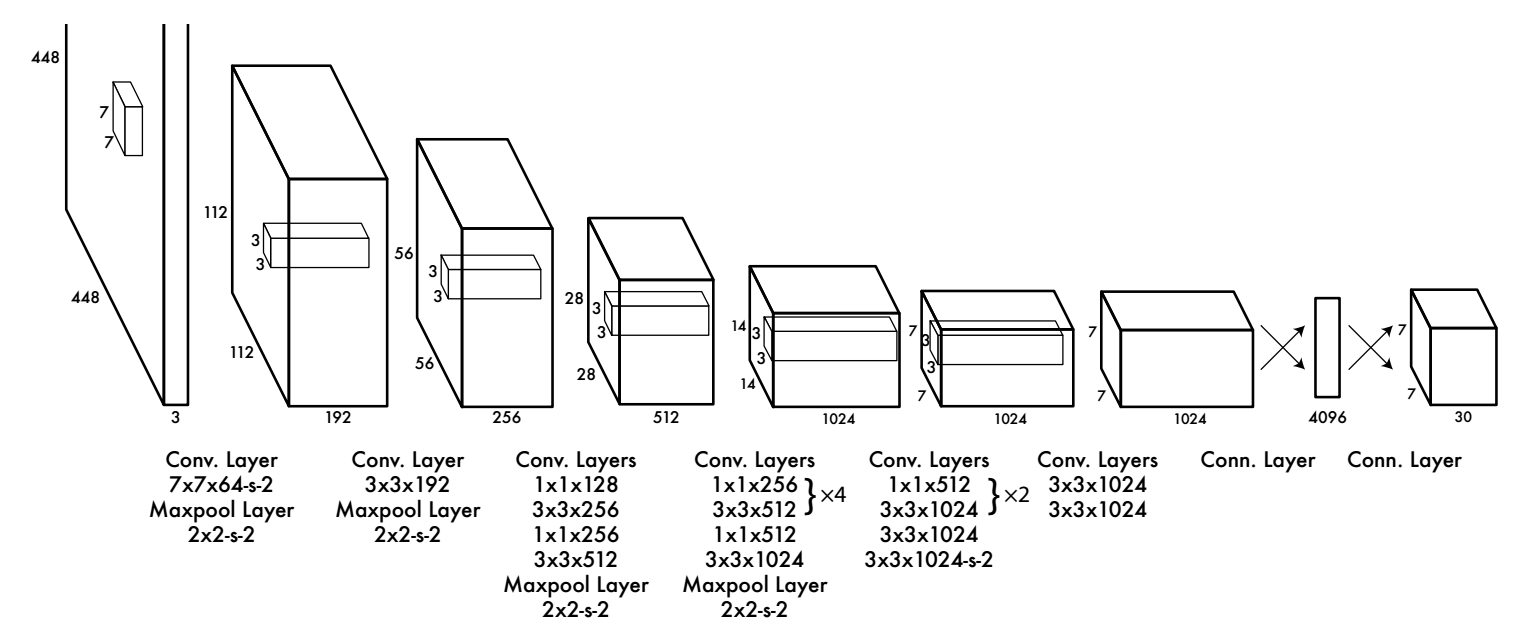
5 predictions for one bounding box: x, y, w, h, score
(x, y) center of the box relative to the bounds of grid
w, h are width and height relative to the whole image
the score is a measure of objectness
Each grid cell predicts C conditional class probabilities
Class-specific confidence score is defined as
One predictor is “responsible” for an object having the highest IOU with the ground-truth
The output is an SxSx(Bx5+C) tensor
4.1.3 Experiment Result
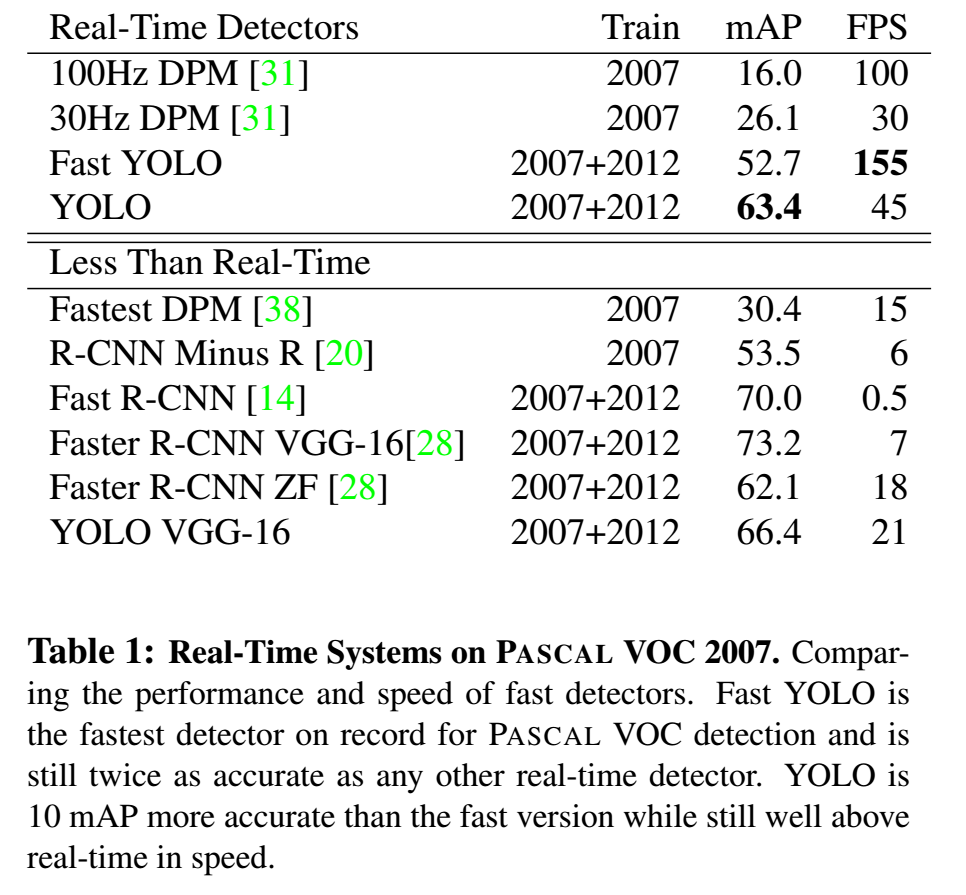
Most effective among real-time detectors
Most efficient among near real-time detectors
4.1.4 Limitations
Too few bounding boxesNearby objects
Small objects
Data driven
Sensitive to new or rare ration
4.1.5 Interesting Details – Training
Pre-train the first 20 layers on ImageNetPre-train on 224*224 images
Fine-tune 24 layers on detection dataset
Fine-tune on 448*448 images
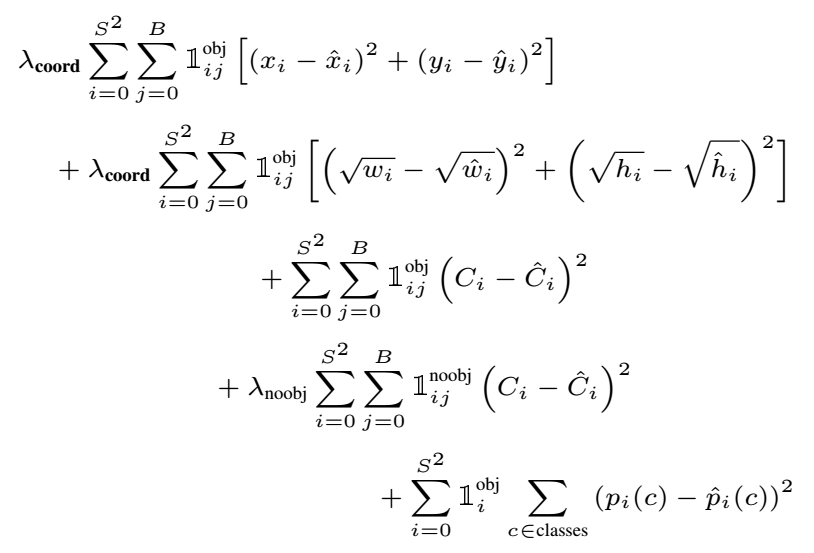
Tricks to balance loss
Weight: localization vs. classification
Weight: positive vs. negative of objectness
Square root: large object vs. small object
“Warm up” to start training
For first epoch, raise 0.001 to 0.01
0.01 for 75 epochs
0.001 for 30 epochs
0.0001 for 30 epochs
4.2 SSD
4.2.1 Single Shot MultiBox Detector
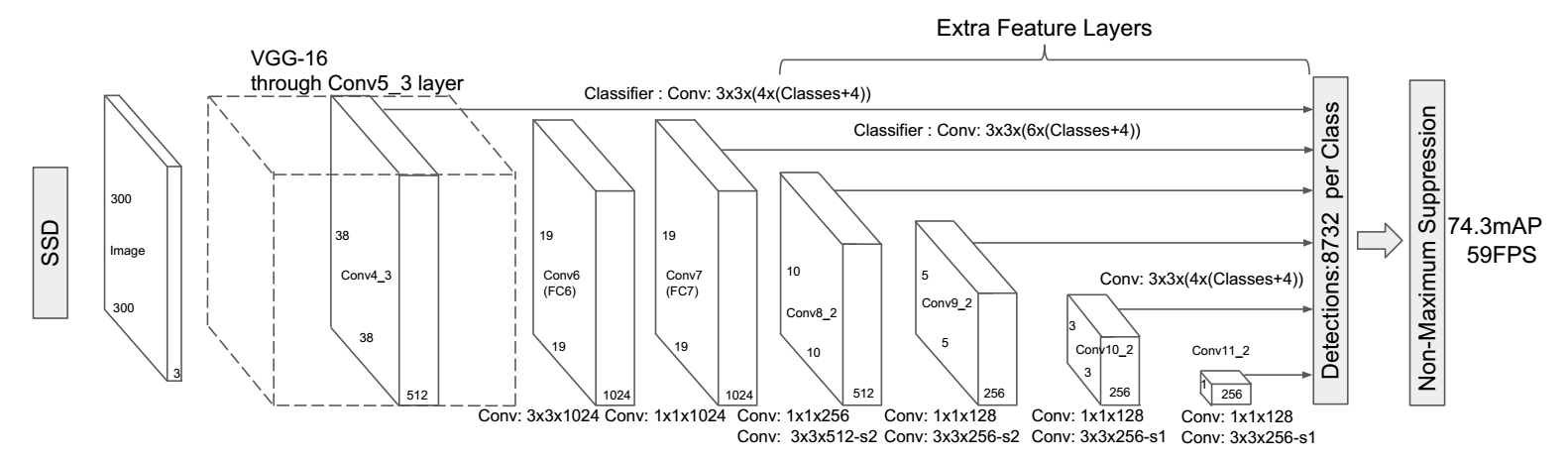
Combine anchor and one-shot prediction
Extract multi-scale features
Refine multi-scale and multi-ratio anchors
Dilated convolution
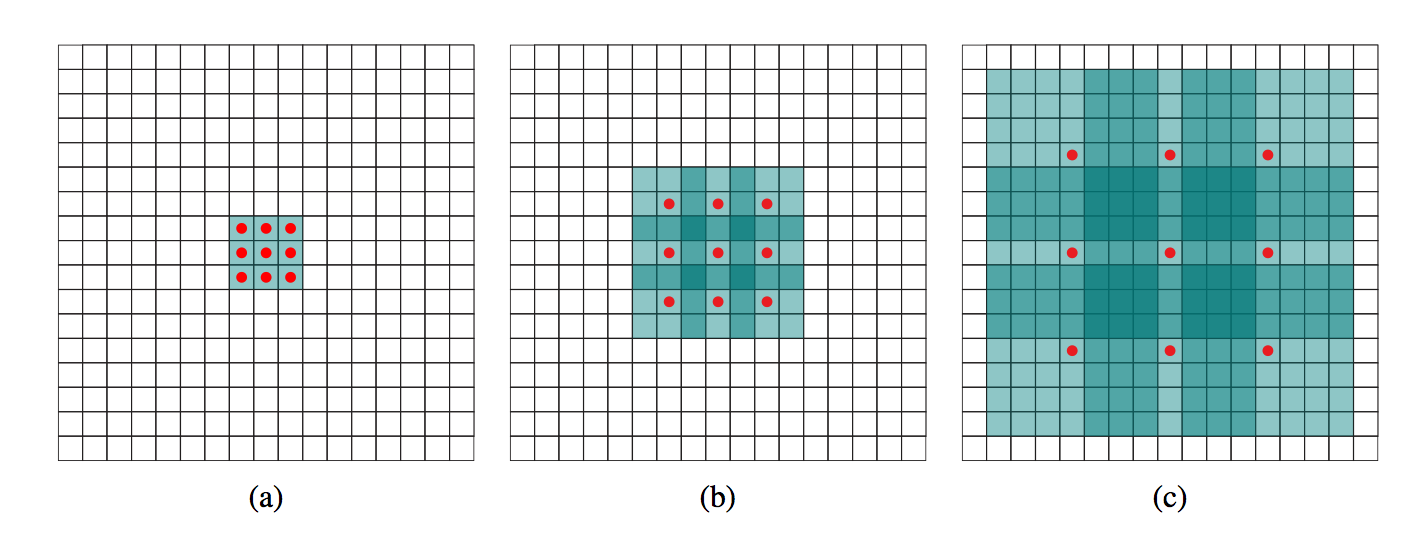
4.2.2 Multi-scale Prediction
Multi-scale and Multi-ratio anchors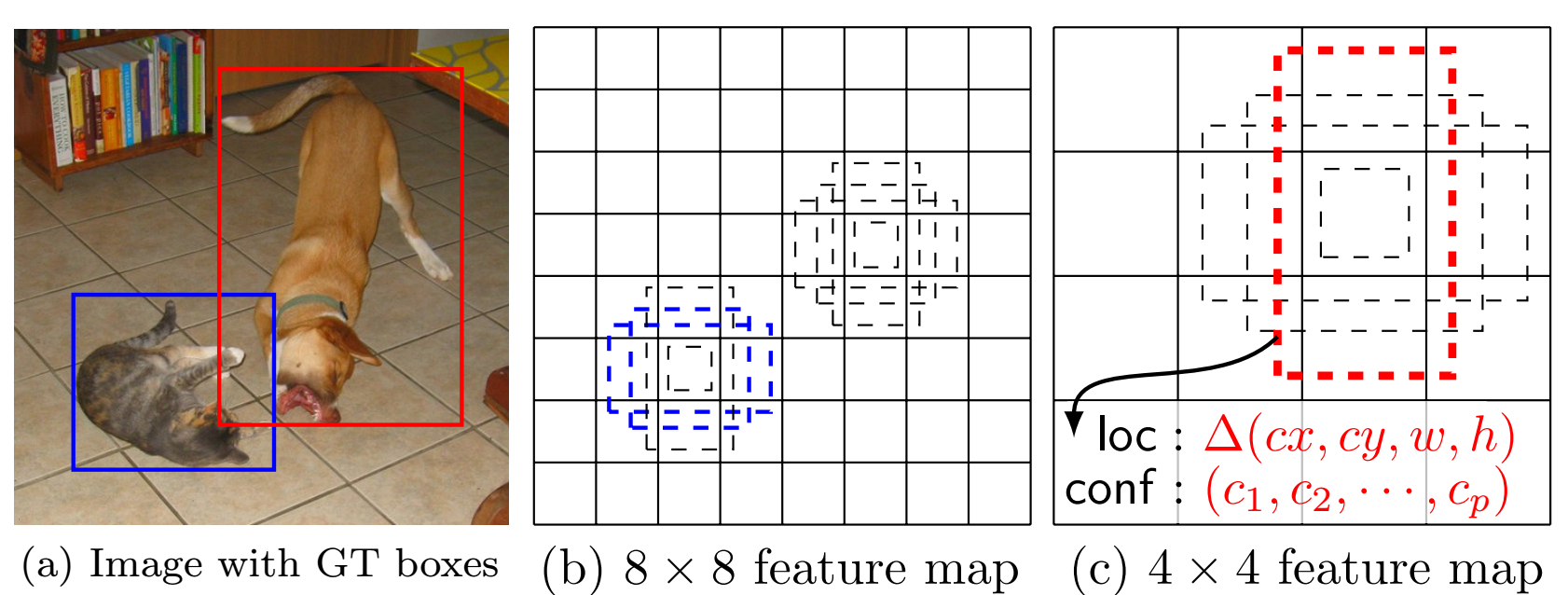
Each feature map cell corresponds to k anchors
Similar to Faster-RCNN, but in multi-scale feature map and directly output category info
Multi-scale feature maps for detection
Additional layers are added to the base network
Different filters are applied to different scale/ratio anchors
(c+4)k filters for k anchors and c categories in one cell, (c+4)kmn outputs for an m*n feature map
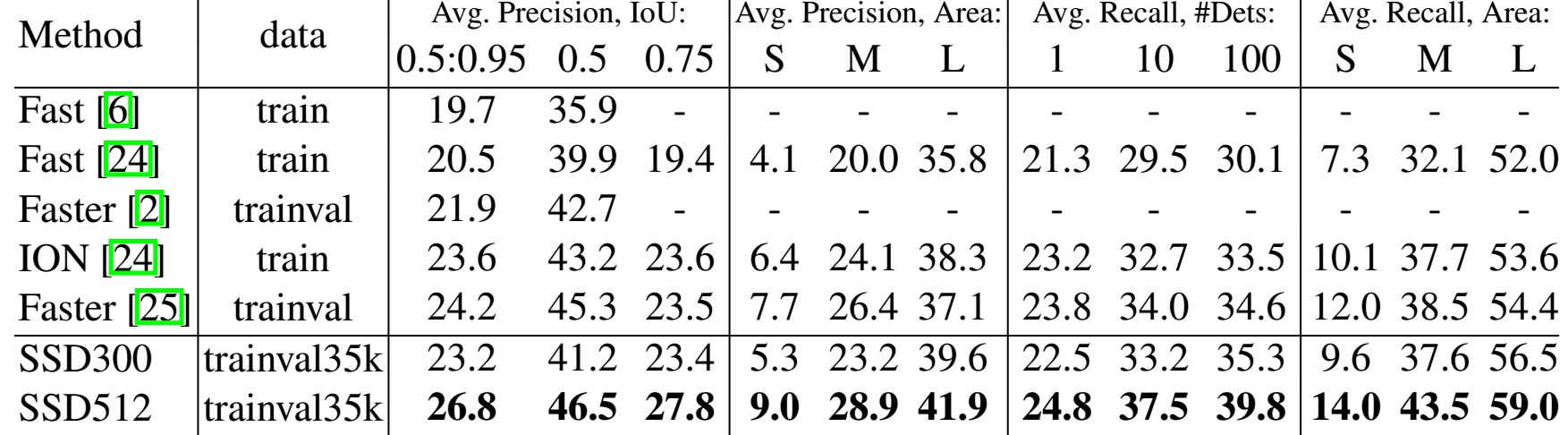
4.2.3 Experiment Result
VOC2012
COCO2015
4.2.4 Interesting Details – Training
Matching anchors with ground-truthMatch each ground-truth to a default box with the best IOU
Match the anchor to any ground truth with IOU higher than a threshold
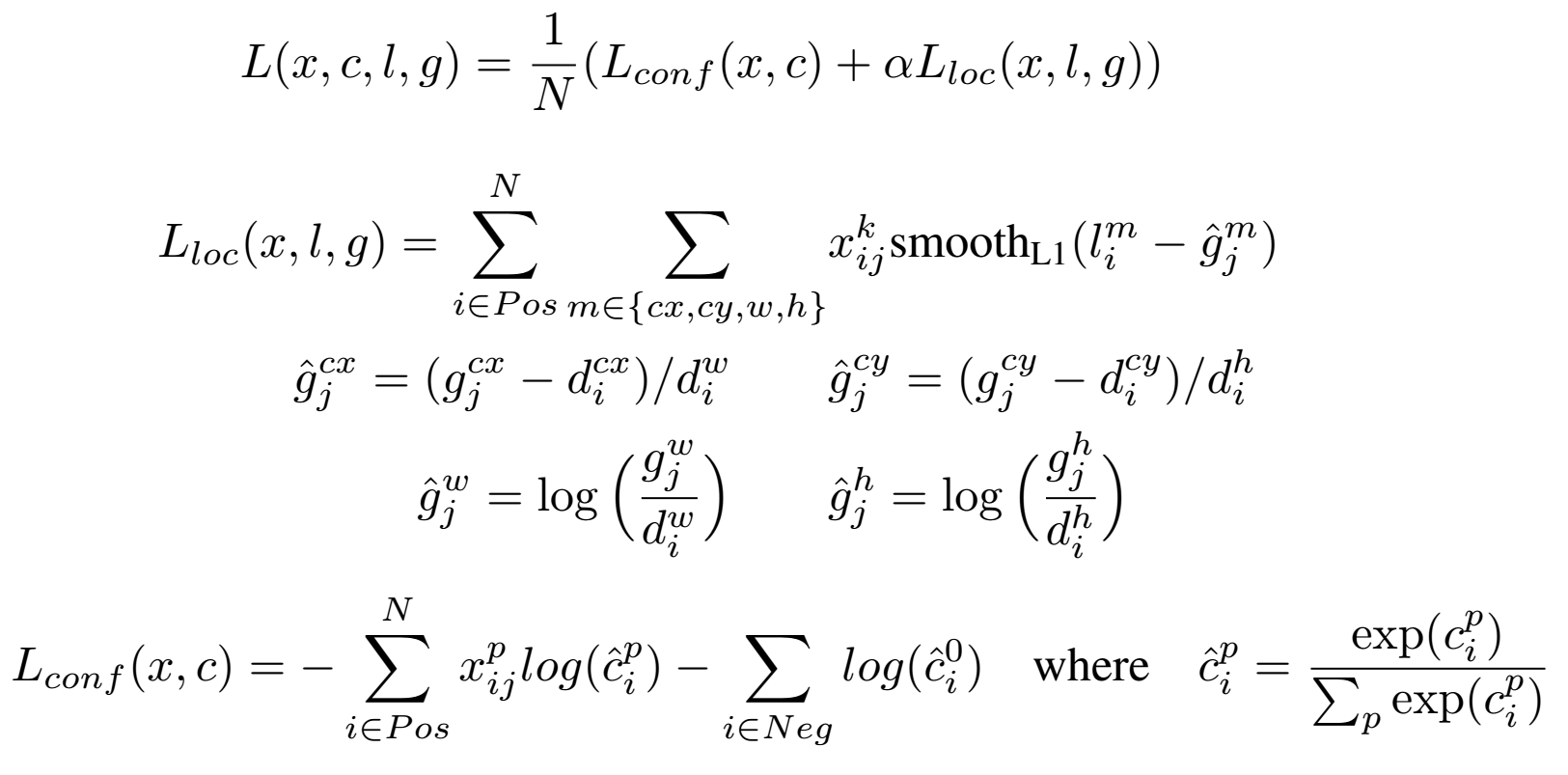
Training objective
Scales and aspect ratios for anchors
Regularly spaced scales
{1,2,3,1/2,1/3} – 6 ratios
Hard negative mining
Sort the anchors using the highest confidence loss
Pick the top ones so that neg:pos = 3:1
Data augmentation
Sample randomly from training images
Entire input image
Sample a patch so that min IOU with object is 0.1, 0.3, 0.5, 0.7 or 0.9
Randomly sample a patch, [0.1, 1] of the image, aspect ration [1/2, 2], randomly flip
Comparison
5 Others
PVANET: Deep but Lightweight Neural Networks for Real-time Object Detection (Reading Note)Variant of Faster-RCNN
Design of architecture
Inside-Outside Net: Detecting Objects in Context with Skip Pooling and Recurrent Neural Networks (Reading Note)
Both local and global information are take into account
Skip pooling uses the information of different scales
R-FCN: Object Detection via Region-based Fully Convolutional Networks (Reading Note)
Position-sensitive RoI pooling
Feature Pyramid Networks for Object Detection (Reading Note)
lateral connections is developed for building high-level semantic feature maps at all scales
Beyond Skip Connections: Top-Down Modulation for Object Detection (Reading Note)
Similar with FPN
YOLO9000: Better, Faster, Stronger (Reading Note)
Better, Faster, Stronger
DSSD: Deconvolutional Single Shot Detector (Reading Note)

相关文章推荐
- G-CNN: an Iterative Grid Based Object Detector
- How to train models of Object Detection with Discriminatively Trained Part Based Models
- 3.3 无proposal检测方法(2): G-CNN: an Iterative Grid Based Object Detector
- Beginning C# 3.0: An Introduction to Object Oriented Programming
- Beginning C# 3.0: An Introduction to Object Oriented Programming, Wrox
- Fast R-CNN: Fast Region-based Convolutional Networks for object detection(阅读)
- Fast R-CNN: Fast Region-based Convolutional Networks for object detection(阅读)
- How to train models of Object Detection with Discriminatively Trained Part Based Models
- An Introduction to Change Points (packages: ecp and BreakoutDetection)
- 论文笔记 G-CNN: an Iterative Grid Based Object Detector
- Fast R-CNN: Fast Region-based Convolutional Networks for object detection
- How to train models of Object Detection with Discriminatively Trained Part Based Model
- Region-based Convolutional Networks for Accurate Object Detection and Segmentation----R-CNN论文笔记
- 《C#3.0面向对象编程 Beginning C# 3.0: An Introduction to Object Oriented Programming》推荐给编程入门者(初中生也可读)
- [Javascript] Different ways to create an new array/object based on existing array/object
- Applying UML and Patterns: An Introduction to Object-Oriented Analysis and Design and Iterative Deve
- How to train models of Object Detection with Discriminatively Trained Part Based Models
- How to train models of Object Detection with Discriminatively Trained Part Based Models
- How to train models of Object Detection with Discriminatively Trained Part Based Models
- An Introduction to JavaScript Object Notation (JSON) in JavaScript and .NET