Graham's Scan法求解凸包问题
2017-05-27 11:13
218 查看
概念
凸包(Convex Hull)是一个计算几何(图形学)中的概念。用不严谨的话来讲,给定二维平面上的点集,凸包就是将最外层的点连接起来构成的凸多边型,它能包含点集中所有点的。严谨的定义和相关概念参见维基百科:凸包。这个算法是由数学大师葛立恒(Graham)发明的,他曾经是美国数学学会(AMS)主席、AT&T首席科学家以及国际杂技师协会(IJA)主席。(太汗了,这位大牛还会玩杂技~)
问题
给定平面上的二维点集,求解其凸包。过程
1. 在所有点中选取y坐标最小的一点H,当作基点。如果存在多个点的y坐标都为最小值,则选取x坐标最小的一点。坐标相同的点应排除。然后按照其它各点p和基点构成的向量<H,p>与x轴的夹角进行排序,夹角由大至小进行顺时针扫描,反之则进行逆时针扫描。实现中无需求得夹角,只需根据向量的内积公式求出向量的模即可。以下图为例,基点为H,根据夹角由小至大排序后依次为H,K,C,D,L,F,G,E,I,B,A,J。下面进行逆时针扫描。
2. 线段<H, K>一定在凸包上,接着加入C。假设线段<K, C>也在凸包上,因为就H,K,C三点而言,它们的凸包就是由此三点所组成。但是接下来加入D时会发现,线段<K, D>才会在凸包上,所以将线段<K, C>排除,C点不可能是凸包。
3. 即当加入一点时,必须考虑到前面的线段是否会出现在凸包上。从基点开始,凸包上每条相临的线段的旋转方向应该一致,并与扫描的方向相反。如果发现新加的点使得新线段与上线段的旋转方向发生变化,则可判定上一点必然不在凸包上。实现时可用向量叉积进行判断,设新加入的点为pn + 1,上一点为pn,再上一点为pn - 1。顺时针扫描时,如果向量<pn - 1, pn>与<pn, pn + 1>的叉积为正(逆时针扫描判断是否为负),则将上一点删除。删除过程需要回溯,将之前所有叉积符号相反的点都删除,然后将新点加入凸包。
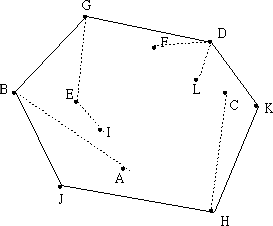
在上图中,加入K点时,由于线段<H,K>相对于<H,C>为顺时针旋转,所以C点不在凸包上,应该删除,保留K点。接着加入D点,由于线段<K, D>相对<H, K>为逆时针旋转,故D点保留。按照上述步骤进行扫描,直到点集中所有的点都遍例完成,即得到凸包。
复杂度
这个算法可以直接在原数据上进行运算,因此空间复杂度为O(1)。但如果将凸包的结果存储到另一数组中,则可能在代码级别进行优化。由于在扫描凸包前要进行排序,因此时间复杂度至少为快速排序的O(nlgn)。后面的扫描过程复杂度为O(n),因此整个算法的复杂度为O(nlgn)。C++/STL实现
概念
凸包(Convex Hull)是一个计算几何(图形学)中的概念。用不严谨的话来讲,给定二维平面上的点集,凸包就是将最外层的点连接起来构成的凸多边型,它能包含点集中所有点的。严谨的定义和相关概念参见维基百科:凸包。这个算法是由数学大师葛立恒(Graham)发明的,他曾经是美国数学学会(AMS)主席、AT&T首席科学家以及国际杂技师协会(IJA)主席。(太汗了,这位大牛还会玩杂技~)
问题
给定平面上的二维点集,求解其凸包。过程
1. 在所有点中选取y坐标最小的一点H,当作基点。如果存在多个点的y坐标都为最小值,则选取x坐标最小的一点。坐标相同的点应排除。然后按照其它各点p和基点构成的向量<H,p>与x轴的夹角进行排序,夹角由大至小进行顺时针扫描,反之则进行逆时针扫描。实现中无需求得夹角,只需根据向量的内积公式求出向量的模即可。以下图为例,基点为H,根据夹角由小至大排序后依次为H,K,C,D,L,F,G,E,I,B,A,J。下面进行逆时针扫描。2. 线段<H, K>一定在凸包上,接着加入C。假设线段<K, C>也在凸包上,因为就H,K,C三点而言,它们的凸包就是由此三点所组成。但是接下来加入D时会发现,线段<K, D>才会在凸包上,所以将线段<K, C>排除,C点不可能是凸包。
3. 即当加入一点时,必须考虑到前面的线段是否会出现在凸包上。从基点开始,凸包上每条相临的线段的旋转方向应该一致,并与扫描的方向相反。如果发现新加的点使得新线段与上线段的旋转方向发生变化,则可判定上一点必然不在凸包上。实现时可用向量叉积进行判断,设新加入的点为pn + 1,上一点为pn,再上一点为pn - 1。顺时针扫描时,如果向量<pn - 1, pn>与<pn, pn + 1>的叉积为正(逆时针扫描判断是否为负),则将上一点删除。删除过程需要回溯,将之前所有叉积符号相反的点都删除,然后将新点加入凸包。
在上图中,加入K点时,由于线段<H,K>相对于<H,C>为顺时针旋转,所以C点不在凸包上,应该删除,保留K点。接着加入D点,由于线段<K, D>相对<H, K>为逆时针旋转,故D点保留。按照上述步骤进行扫描,直到点集中所有的点都遍例完成,即得到凸包。
复杂度
这个算法可以直接在原数据上进行运算,因此空间复杂度为O(1)。但如果将凸包的结果存储到另一数组中,则可能在代码级别进行优化。由于在扫描凸包前要进行排序,因此时间复杂度至少为快速排序的O(nlgn)。后面的扫描过程复杂度为O(n),因此整个算法的复杂度为O(nlgn)。C++/STL实现

相关文章推荐
- Graham's Scan法求解凸包问题
- Graham's Scan法求解凸包问题
- HOJ-GSM-Graham's Scan法求解凸包问题
- Graham's Scan法求解凸包问题
- Graham's Scan法求解【 凸包 】问题
- Graham's Scan法求解凸包问题
- Graham's Scan法求解凸包问题(C++)
- Graham's Scan法求解凸包问题
- Graham's Scan法求解凸包问题
- 凸包问题求解 使用蛮力算法
- 分治法在求解凸包问题中的应用(JAVA)--快包算法
- 蛮力法在求解凸包问题中的应用(JAVA)
- 凸包问题及其求解方法
- 通用逻辑问题求解程序
- 模拟退火算法求解TSP问题--转载
- 使用C#求解N皇后问题。
- 工作中碰到的几个问题,网络中求解!!
- 动态规划求解最长公共子串问题
- 全排列问题之递归求解
- [转]最长递增子序列问题的求解