世界坐标系和相机坐标系,图像坐标系的关系
2017-05-01 16:49
232 查看
一、四个坐标系简介和转换
相机模型为以后一切标定算法的关键,只有这边有相当透彻的理解,对以后的标定算法才能有更好的理解。本人研究了好长时间,几乎每天都重复看几遍,最终才会明白其推导过程。我觉得首先我们要理解相机模型中的四个平面坐标系的关系:像素平面坐标系(u,v)、像平面坐标系(图像物理坐标第(x,y)、相机坐标系(Xc,Yc,Zc)和世界坐标系(Xw,Yw,Zw),在每一篇介绍相机模型的文章中都有介绍。
我刚开始理解时,看着那一堆的公式十分的头晕,我相信很多初学者和我一样,但仔细想想,只不过是,我们假设了一些参数,使四个坐标系之间的坐标联系起来,这样我们就可以从拍摄的图片上一个点坐标一路反推出世界中的那个点的坐标,这样就达到了我们的目的,三维重建。而那些我们假设的参数,就是我们要标定的内外参数。

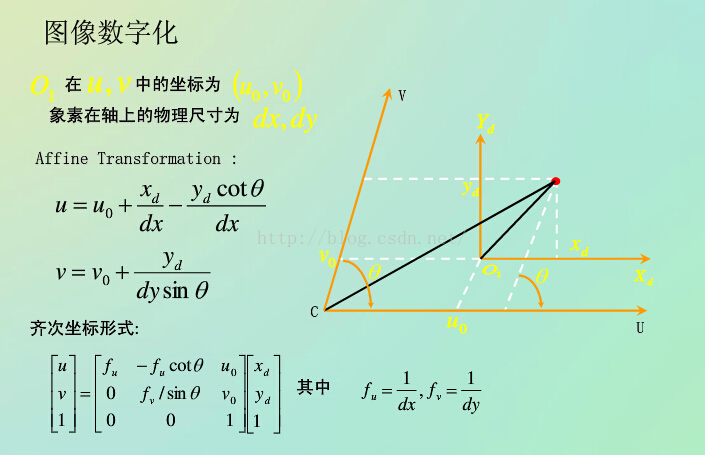
1、像素坐标与像平面坐标系之间的关系
确定他们的关系之前,我们可以假设每一个像素在u轴和v轴方向上的物理尺寸为dx和dy。仔细看下他们的模型可以推出以下公式(这个还是比较好理解的):
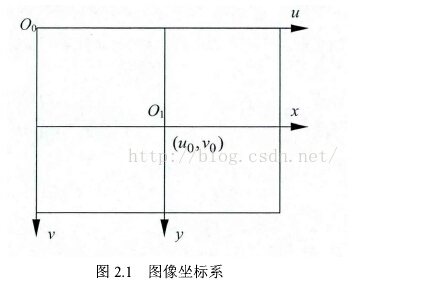

解释:1、dx,dy,u0,v0其实都是我们假设出来的参数,dxdy表示感光芯片上像素的实际大小,是连接像素坐标系和真实尺寸坐标系的,u0,v0是图像平面中心,最终是要我们求的内外参数。
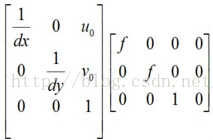
得出这个公式后我们可以运用线性代数的知识把方程用矩阵形式表示:

当然我们也可以用另一种矩阵形式表示:

2、相机坐标系与世界坐标系之间的关系
这两个坐标系之间的关系我们可以旋转矩阵R和平移矩阵T来得到以下关系:
公式4
解释:1、 在这个公式中,R为3*3矩阵,T为3*1,0为(0,0,0),简化用Lw表示后为4*4矩阵。
3、成像投影关系(相机坐标系与像平面坐标系)
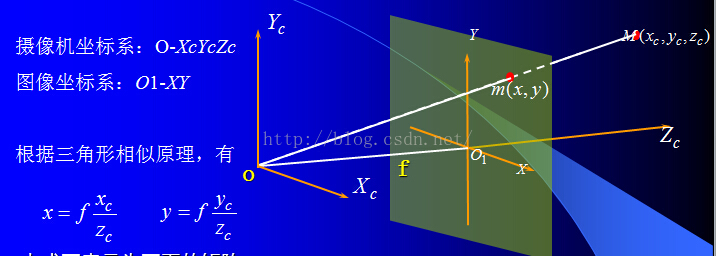
在相机模型中我们可以得到以下公式:

公式5
解释:1、
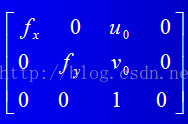
同样我们用矩阵形式表示:

公式6
4、得到公式
而我们可以将以上公式综合一下就可以得到:


因此,内参数矩阵可以表示为:
=
外参矩阵可以表示为:

,由旋转矩阵R和平移向量T组成
当然在好多资料上都有这种做法:
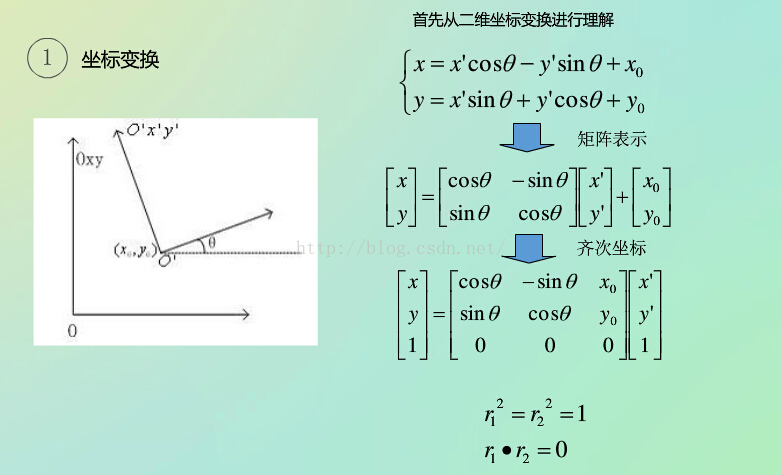
上图中表示的情况是像素坐标系和图像物理坐标系的两个坐标轴不是平行的关系,像素坐标系的两个坐标轴也不是垂直90°的关系,而图像物理坐标系的两个坐标轴是垂直关系。所以,我们在转换两个坐标轴的坐标之间的关系时就必须考虑像素坐标系两个坐标轴之间的夹角了。就有了上面的不同的内参矩阵,理解了就好了。

相关文章推荐
- 世界坐标系和相机坐标系,图像坐标系的关系
- 世界坐标系和相机坐标系,图像坐标系的关系
- 世界坐标系和相机坐标系,图像坐标系的关系
- 【立体视觉】世界坐标系、相机坐标系、图像坐标系、像素坐标系之间的关系
- 世界坐标系和相机坐标系,图像坐标系的关系
- 世界坐标系和相机坐标系,图像坐标系的关系
- 世界坐标系和相机坐标系,图像坐标系的关系
- 计算机视觉:相机成像原理:世界坐标系、相机坐标系、图像坐标系、像素坐标系之间的转换
- 相机针孔模型----从世界坐标系,到相机坐标系,再到图像物理坐标系,最后到图像像素坐标系的转换过程解析
- 世界坐标系,相机坐标系,图像坐标系,像素坐标系转换
- 相机针孔模型----从世界坐标系,到相机坐标系,再到图像物理坐标系,最后到图像像素坐标系的转换过程解析
- 计算机视觉:相机成像原理:世界坐标系、相机坐标系、图像坐标系、像素坐标系之间的转换
- 图像坐标系、摄像机坐标系与世界坐标系的关系
- 计算机视觉:相机成像原理:世界坐标系、相机坐标系、图像坐标系、像素坐标系之间的转换
- 世界坐标系、相机坐标系、图像坐标系之间的关系
- 计算机视觉:相机成像原理:世界坐标系、相机坐标系、图像坐标系、像素坐标系之间的转换
- 相机针孔模型----从世界坐标系,到相机坐标系,再到图像物理坐标系,最后到图像像素坐标系的转换过程解析
- 世界坐标系和相机坐标系,图像坐标系的关系
- OpenCV图像坐标系与行列宽高的关系
- 从世界坐标系到相机坐标系(3D物体到2D图像的转变)