matlab图像特征提取--边缘,角点,SURF检测
2017-04-01 15:37
323 查看
1.图像的边缘检测.
图像的边缘是指周围像素灰度急剧变化的那些像素的集合,它是图像最基本的特征.边缘存在于目标,背景和区域之间,所以,它是图像分割所依赖的最重要依据.由于边缘是位置的标志,对灰度的变化不敏感,因此,边缘也是图像匹配的重要特征.
边缘检测基本思想是先检测图像中的边缘点,再按照某种策略将边缘点连接或轮廓,从而构成分割区域.由于边缘是所要提取目标和背景的分界线,提取出边缘才能将目标和背景区分开,因此边缘检测对于数字图像处理十分重要.
边缘大致可以分为两种:一种是阶跃状边缘,边缘两边像素的灰度值明显不同;另一种为屋顶状边缘,边缘处于灰度值由小到大再到小变化的转折点处.
2.边缘检测中Prewitt算子.
prewitt算子是加权平均算子,对噪声有抑制作用,但是像素平均相当于对图像进行地同滤波.
3.边缘检测中Canny算子
4000
Canny边缘检测是一种比较新的边缘检测算子,具有很好的边缘监测性能,在图像处理中得到了越来越广泛的应用。
4.角点特征检测
角点是两个边缘的交点;角点是领域内具有两个主方向的特征点.角点所在的领域通常也是图像中稳定的,信息丰富的区域,这些领域可能具有某些特性,如旋转不变性,尺度不变性,仿射不变性和光照亮度不变性.因此在计算机视觉和数字图像领域,研究角点具有重要意义.
5.Harris角点基本原理
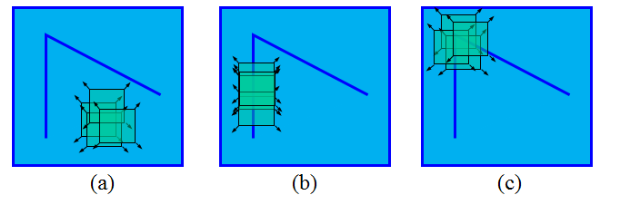
当一个窗口在图像上移动,在平滑区域如图(a),窗口在各个方向上没有变化。在边缘上如图(b),窗口在边缘的方向上没有变化。在角点处如图(c),窗口在各个方向上具有变化。Harris角点检测正是利用了这个直观的物理现象,通过窗口在各个方向上的变化程度,决定是否为角点。
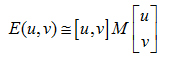
将图像窗口平移[u,v]产生灰度变化E(u,v)

由:

,
得到:

对于局部微小的移动量 [u,v],近似表达为:
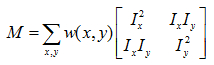
其中M是 2*2 矩阵,可由图像的导数求得:
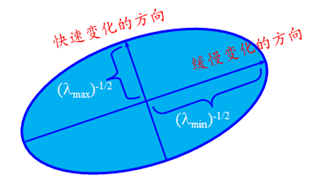
E(u,v)的椭圆形式如下图:
定义角点响应函数 R 为:

6.SURF特征提取原理
计算机视觉中,引入尺度不变的特征,主要的思想是每个检测到的特征点都伴随着对应的尺寸因子。当我们想匹配不同图像时,经常会遇到图像尺度不同的问题,不同图像中特征点的距离变得不同,物体变成不同的尺寸,如果我们通过修正特征点的大小,就会造成强度不匹配。为了解决这个问题,提出一个尺度不变的SURF特征检测,在计算特征点的时候把尺度因素加入之中。
图像的边缘是指周围像素灰度急剧变化的那些像素的集合,它是图像最基本的特征.边缘存在于目标,背景和区域之间,所以,它是图像分割所依赖的最重要依据.由于边缘是位置的标志,对灰度的变化不敏感,因此,边缘也是图像匹配的重要特征.
边缘检测基本思想是先检测图像中的边缘点,再按照某种策略将边缘点连接或轮廓,从而构成分割区域.由于边缘是所要提取目标和背景的分界线,提取出边缘才能将目标和背景区分开,因此边缘检测对于数字图像处理十分重要.
边缘大致可以分为两种:一种是阶跃状边缘,边缘两边像素的灰度值明显不同;另一种为屋顶状边缘,边缘处于灰度值由小到大再到小变化的转折点处.
2.边缘检测中Prewitt算子.
prewitt算子是加权平均算子,对噪声有抑制作用,但是像素平均相当于对图像进行地同滤波.
3.边缘检测中Canny算子
4000
Canny边缘检测是一种比较新的边缘检测算子,具有很好的边缘监测性能,在图像处理中得到了越来越广泛的应用。
4.角点特征检测
角点是两个边缘的交点;角点是领域内具有两个主方向的特征点.角点所在的领域通常也是图像中稳定的,信息丰富的区域,这些领域可能具有某些特性,如旋转不变性,尺度不变性,仿射不变性和光照亮度不变性.因此在计算机视觉和数字图像领域,研究角点具有重要意义.
5.Harris角点基本原理
当一个窗口在图像上移动,在平滑区域如图(a),窗口在各个方向上没有变化。在边缘上如图(b),窗口在边缘的方向上没有变化。在角点处如图(c),窗口在各个方向上具有变化。Harris角点检测正是利用了这个直观的物理现象,通过窗口在各个方向上的变化程度,决定是否为角点。
将图像窗口平移[u,v]产生灰度变化E(u,v)
由:
,
得到:
对于局部微小的移动量 [u,v],近似表达为:
其中M是 2*2 矩阵,可由图像的导数求得:
E(u,v)的椭圆形式如下图:
定义角点响应函数 R 为:
6.SURF特征提取原理
计算机视觉中,引入尺度不变的特征,主要的思想是每个检测到的特征点都伴随着对应的尺寸因子。当我们想匹配不同图像时,经常会遇到图像尺度不同的问题,不同图像中特征点的距离变得不同,物体变成不同的尺寸,如果我们通过修正特征点的大小,就会造成强度不匹配。为了解决这个问题,提出一个尺度不变的SURF特征检测,在计算特征点的时候把尺度因素加入之中。

相关文章推荐
- 图像边缘检测原理&何谓角点及Harris角点的基本原理&SURF特征提取简介
- 图像的边缘检测+角点特征检测+surf特征提取
- 图像边缘检测、角点特征检测以及SURF特征提取
- 图像特征提取:Sobel边缘检测
- 利用SURF特征检测和FLANN最近邻算法实现图像的目标提取
- 图像特征提取:Sobel边缘检测
- 图像特征提取:边缘检测
- 图像特征提取:边缘检测
- 图像特征提取:Sobel边缘检测
- 图像边缘检测及提取方法总结(含Matlab代码)
- 图像特征提取:Sobel边缘检测
- 目标检测的图像特征提取之(一)HOG特征
- 目标检测的图像特征提取之(三)Haar特征
- 目标检测的图像特征提取之(二)LBP特征
- 目标检测的图像特征提取
- 目标检测的图像特征提取之(三)Haar特征
- 目标检测的图像特征提取之(三)Haar特征
- 目标检测的图像特征提取之(一)HOG特征
- 目标检测的图像特征提取之(一)HOG特征
- halcon图像边缘提取(边缘检测)