K-means之C++及OpenCV实现
2017-03-23 21:51
423 查看
这个算法的步骤如下:
1.随机选取样本中的K个点作为聚类中心
那么,现在,我实现的程序的步骤也是按照上面一步一步来的,
为了方便,我直接在平面上随机产生n个点,选取前K个点作为聚类中心,
距离就定义为平面上的欧式距离,
然后为了形象化地观察过程和结果,我将过程以图像的方式显示。
代码如下:
首先是主体:
[cpp] view
plain copy
print?
int iter_times = 0;//迭代次数
while(!good_result())//检查是否是需要的聚类中心
{
for(int i = 0;i < POINT_NUM;i++)
{
double min = 10000;
int min_k = 0;
for(int j = 0;j < K;j++)
{
double tmp = DIS(c[j].center,s[i].p);
if(tmp < min)
{
min = tmp;
min_k = j;
}
}
s[i].cluster = min_k;
c[min_k].count++;
}
update_center();//更新聚类中心
iter_times++;
show_outcome();
}
然后是其他函数的实现:
[cpp] view
plain copy
print?
void update_center()
{
double x[K],y[K];
memset(x,0,sizeof(x));
memset(y,0,sizeof(y));
for(int i = 0;i < POINT_NUM;i++)
{
x[s[i].cluster] += s[i].p.x;
y[s[i].cluster] += s[i].p.y;
}
for(int i = 0;i < K;i++)
{
c[i].pre_center = c[i].center;
c[i].center.x = x[i] / c[i].count;
c[i].center.y = y[i] / c[i].count;
c[i].count = 0;
}
}
判断是否是需要的:
[cpp] view
plain copy
print?
bool good_result()
{
for(int i = 0;i < K;i++)
{
if(DIS(c[i].center,c[i].pre_center) > TH)
return false;
}
return true;
}
显示结果:
[cpp] view
plain copy
print?
void show_outcome()
{
for(int y = 0;y < HEIGHT;y++)//这里将平面中所有的点都标记,就可以看到平面是怎样被划分的了
for(int x = 0;x < WIDTH;x++)
{
double min = 1000;
int min_k = 0;
CvPoint p = cvPoint(x,y);
for(int i = 0;i < K;i++)
{
double tmp = DIS(c[i].center,p);
if(tmp < min)
{
min = tmp;
min_k = i;
}
}
IMG_B(img,x,y) = color[min_k].val[0];
IMG_G(img,x,y) = color[min_k].val[1];
IMG_R(img,x,y) = color[min_k].val[2];
IMG_A(img,x,y) = 200;//4通道图像,就是说可以是透明的,纯试验而已,哪知道直接显示没效果,要保存之后才能看出来。
}
CvScalar scalar = cvScalar(255,255,255,255);
for(int i = 0;i < POINT_NUM;i++)//画每个样本点
{
int x = s[i].p.x;
int y = s[i].p.y;
cvLine(img,cvPoint(x - 5,y),cvPoint(x + 5,y),scalar,2);
cvLine(img,cvPoint(x,y - 5),cvPoint(x,y + 5),scalar,2);
}
for(int i = 0;i < K;i++)//画聚类中心
{
int x = c[i].center.x;
int y = c[i].center.y;
cvCircle(img,cvPoint(x,y),20,scalar,2);
}
cvShowImage("Image",img);
cvWaitKey(100);//100毫秒是个差不多的数值,可以完整的看到聚类过程
}
看下效果:
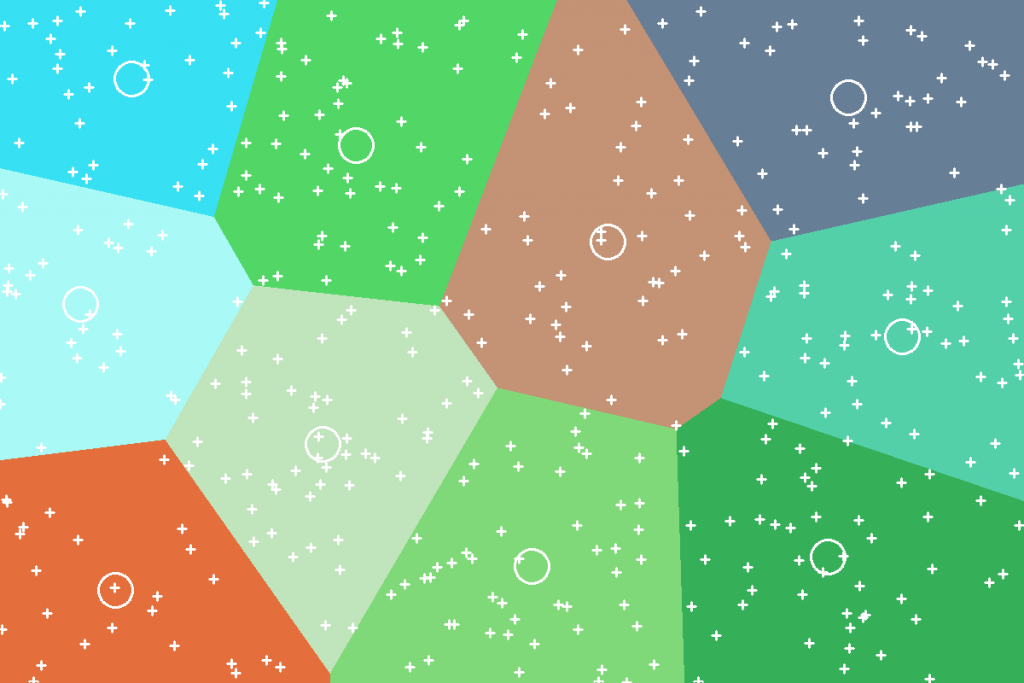
而通过几次运行和观察,阈值不必取的很小,首先是迭代次数越来越多,时间越来越长,但结果差别却是越来越小,即,到几次迭代之后就能取得好的效果了,再迭代下去取的结果跟原来相差不大。
const int nClusters = 4;//这是Kmeans算法的一个缺点,在聚类之前需要指定类别个数
int _tmain(int argc, _TCHAR* argv[])
{
Mat src;
src = imread("E:\\bad\\belt (1).jpeg");
imshow("original", src);
blur(src, src, Size(11,11));//使用blur对图像进行平滑处理,这种方法就是最简单的求平均数
//size:定义滤波器的大小
imshow("blurred", src);
//p是特征矩阵,每行表示一个特征,每个特征对应src中每个像素点的(x,y,r,g,b共5维)
Mat p = Mat::zeros(src.cols*src.rows, 5, CV_32F); //初始化全0矩阵(行和列还有类型)
//所有元素行,5列的矩阵
Mat bestLabels, centers, clustered;
vector<Mat> bgr; //定义一个Mat向量容器保存拆分后的数据
split(src, bgr); //分隔出src的三个通道
for(int i=0; i<src.cols*src.rows; i++)
{
p.at<float>(i,0) = (i/src.cols) / src.rows; // p.at<uchar>(y,x) 相当于 p->Imagedata[y *p->widthstep + x], p是8位uchar
p.at<float>(i,1) = (i%src.cols) / src.cols; // p.at<float>(y,x) 相当于 p->Imagedata[y *p->widthstep + x], p是32位float
p.at<float>(i,2) = bgr[0].data[i] / 255.0;
p.at<float>(i,3) = bgr[1].data[i] / 255.0;
p.at<float>(i,4) = bgr[2].data[i] / 255.0;
}
//计算时间
double t = (double)cvGetTickCount();//GetTickcount函数:它返回从操作系统启动到当前所经的计时周期数
//kmeans聚类,每个样本的标签保存在bestLabels中
kmeans(p, nClusters, bestLabels,
TermCriteria( CV_TERMCRIT_EPS+CV_TERMCRIT_ITER, 10, 1.0),
3, KMEANS_PP_CENTERS, centers);
t = (double)cvGetTickCount() - t;
float timecost = t/(cvGetTickFrequency()*1000);//getTickFrequency函数:返回每秒的计时周期数
//给每个类别赋颜色,其值等于每个类第一个元素的值
Vec3b colors[nClusters];//Vec3b 是定义一个uchar类型的数组长度为3
bool colormask[nClusters];
memset(colormask, 0, nClusters*sizeof(bool));//将colormask中前nClusters*sizeof(bool)个字节用0替换并返回colormask
//memset:作用是在一段内存块中填充某个给定的值,
//它是对较大的结构体或数组进行清零操作的一种最快方法
int count = 0;
for(int i=0; i<src.cols*src.rows; i++)
{
int clusterindex = bestLabels.at<int>(i,0);
for (int j=0; j<nClusters; j++)
{
if(j == clusterindex && colormask[j] == 0)
{
int y = i/src.cols;
int x = i%src.cols;
colors[j] = src.at<Vec3b>(y,x);
colormask[j] = 1;
count++;
break;
}
}
if(nClusters == count)break;
}
//显示聚类结果
clustered = Mat(src.rows, src.cols, CV_8UC3);
for(int i=0; i<src.cols*src.rows; i++)
{
int y = i/src.cols;
int x = i%src.cols;
int clusterindex = bestLabels.at<int>(i,0);
clustered.at<Vec3b>(y, x) = colors[clusterindex];
}
imshow("clustered", clustered);
cvWaitKey(0);
1.随机选取样本中的K个点作为聚类中心
2.计算所有样本到各个聚类中心的距离,将每个样本规划在最近的聚类中
3.计算每个聚类中所有样本的中心,并将新的中心代替原来的中心
4.检查新老聚类中心的距离,如果距离超过规定的阈值,则重复2-4,直到小于阈值
那么,现在,我实现的程序的步骤也是按照上面一步一步来的,为了方便,我直接在平面上随机产生n个点,选取前K个点作为聚类中心,
距离就定义为平面上的欧式距离,
然后为了形象化地观察过程和结果,我将过程以图像的方式显示。
代码如下:
首先是主体:
[cpp] view
plain copy
print?
int iter_times = 0;//迭代次数
while(!good_result())//检查是否是需要的聚类中心
{
for(int i = 0;i < POINT_NUM;i++)
{
double min = 10000;
int min_k = 0;
for(int j = 0;j < K;j++)
{
double tmp = DIS(c[j].center,s[i].p);
if(tmp < min)
{
min = tmp;
min_k = j;
}
}
s[i].cluster = min_k;
c[min_k].count++;
}
update_center();//更新聚类中心
iter_times++;
show_outcome();
}
然后是其他函数的实现:
[cpp] view
plain copy
print?
void update_center()
{
double x[K],y[K];
memset(x,0,sizeof(x));
memset(y,0,sizeof(y));
for(int i = 0;i < POINT_NUM;i++)
{
x[s[i].cluster] += s[i].p.x;
y[s[i].cluster] += s[i].p.y;
}
for(int i = 0;i < K;i++)
{
c[i].pre_center = c[i].center;
c[i].center.x = x[i] / c[i].count;
c[i].center.y = y[i] / c[i].count;
c[i].count = 0;
}
}
判断是否是需要的:
[cpp] view
plain copy
print?
bool good_result()
{
for(int i = 0;i < K;i++)
{
if(DIS(c[i].center,c[i].pre_center) > TH)
return false;
}
return true;
}
显示结果:
[cpp] view
plain copy
print?
void show_outcome()
{
for(int y = 0;y < HEIGHT;y++)//这里将平面中所有的点都标记,就可以看到平面是怎样被划分的了
for(int x = 0;x < WIDTH;x++)
{
double min = 1000;
int min_k = 0;
CvPoint p = cvPoint(x,y);
for(int i = 0;i < K;i++)
{
double tmp = DIS(c[i].center,p);
if(tmp < min)
{
min = tmp;
min_k = i;
}
}
IMG_B(img,x,y) = color[min_k].val[0];
IMG_G(img,x,y) = color[min_k].val[1];
IMG_R(img,x,y) = color[min_k].val[2];
IMG_A(img,x,y) = 200;//4通道图像,就是说可以是透明的,纯试验而已,哪知道直接显示没效果,要保存之后才能看出来。
}
CvScalar scalar = cvScalar(255,255,255,255);
for(int i = 0;i < POINT_NUM;i++)//画每个样本点
{
int x = s[i].p.x;
int y = s[i].p.y;
cvLine(img,cvPoint(x - 5,y),cvPoint(x + 5,y),scalar,2);
cvLine(img,cvPoint(x,y - 5),cvPoint(x,y + 5),scalar,2);
}
for(int i = 0;i < K;i++)//画聚类中心
{
int x = c[i].center.x;
int y = c[i].center.y;
cvCircle(img,cvPoint(x,y),20,scalar,2);
}
cvShowImage("Image",img);
cvWaitKey(100);//100毫秒是个差不多的数值,可以完整的看到聚类过程
}
看下效果:
而通过几次运行和观察,阈值不必取的很小,首先是迭代次数越来越多,时间越来越长,但结果差别却是越来越小,即,到几次迭代之后就能取得好的效果了,再迭代下去取的结果跟原来相差不大。
const int nClusters = 4;//这是Kmeans算法的一个缺点,在聚类之前需要指定类别个数
int _tmain(int argc, _TCHAR* argv[])
{
Mat src;
src = imread("E:\\bad\\belt (1).jpeg");
imshow("original", src);
blur(src, src, Size(11,11));//使用blur对图像进行平滑处理,这种方法就是最简单的求平均数
//size:定义滤波器的大小
imshow("blurred", src);
//p是特征矩阵,每行表示一个特征,每个特征对应src中每个像素点的(x,y,r,g,b共5维)
Mat p = Mat::zeros(src.cols*src.rows, 5, CV_32F); //初始化全0矩阵(行和列还有类型)
//所有元素行,5列的矩阵
Mat bestLabels, centers, clustered;
vector<Mat> bgr; //定义一个Mat向量容器保存拆分后的数据
split(src, bgr); //分隔出src的三个通道
for(int i=0; i<src.cols*src.rows; i++)
{
p.at<float>(i,0) = (i/src.cols) / src.rows; // p.at<uchar>(y,x) 相当于 p->Imagedata[y *p->widthstep + x], p是8位uchar
p.at<float>(i,1) = (i%src.cols) / src.cols; // p.at<float>(y,x) 相当于 p->Imagedata[y *p->widthstep + x], p是32位float
p.at<float>(i,2) = bgr[0].data[i] / 255.0;
p.at<float>(i,3) = bgr[1].data[i] / 255.0;
p.at<float>(i,4) = bgr[2].data[i] / 255.0;
}
//计算时间
double t = (double)cvGetTickCount();//GetTickcount函数:它返回从操作系统启动到当前所经的计时周期数
//kmeans聚类,每个样本的标签保存在bestLabels中
kmeans(p, nClusters, bestLabels,
TermCriteria( CV_TERMCRIT_EPS+CV_TERMCRIT_ITER, 10, 1.0),
3, KMEANS_PP_CENTERS, centers);
t = (double)cvGetTickCount() - t;
float timecost = t/(cvGetTickFrequency()*1000);//getTickFrequency函数:返回每秒的计时周期数
//给每个类别赋颜色,其值等于每个类第一个元素的值
Vec3b colors[nClusters];//Vec3b 是定义一个uchar类型的数组长度为3
bool colormask[nClusters];
memset(colormask, 0, nClusters*sizeof(bool));//将colormask中前nClusters*sizeof(bool)个字节用0替换并返回colormask
//memset:作用是在一段内存块中填充某个给定的值,
//它是对较大的结构体或数组进行清零操作的一种最快方法
int count = 0;
for(int i=0; i<src.cols*src.rows; i++)
{
int clusterindex = bestLabels.at<int>(i,0);
for (int j=0; j<nClusters; j++)
{
if(j == clusterindex && colormask[j] == 0)
{
int y = i/src.cols;
int x = i%src.cols;
colors[j] = src.at<Vec3b>(y,x);
colormask[j] = 1;
count++;
break;
}
}
if(nClusters == count)break;
}
//显示聚类结果
clustered = Mat(src.rows, src.cols, CV_8UC3);
for(int i=0; i<src.cols*src.rows; i++)
{
int y = i/src.cols;
int x = i%src.cols;
int clusterindex = bestLabels.at<int>(i,0);
clustered.at<Vec3b>(y, x) = colors[clusterindex];
}
imshow("clustered", clustered);
cvWaitKey(0);

相关文章推荐
- K-means之C++及OpenCV实现
- 用C++与OpenCV实现人人上的好友拼图应用
- 二维凸包convex hull之C++及OpenCV实现
- C++ 实现k-means machine learning 算法 Computer Vision
- [algorithm,c++] 基于c++的二维k-means代码实现
- 匈牙利算法的C++实现(基于OpenCV)
- 连通区域标记:c++版的bwlabel实现(基于opencv)
- 小波变换 C++ opencv 实现
- 直方图均衡化的 C++ 实现(基于 openCV)
- SIFT算法的c++实现(VS2010+OpenCV2.3.1)
- 利用opencv2和c++实现视频与图像的互相转换
- opencv2.0以后新增C++接口的 Mat矩阵 单行赋值及矩阵合并的问题与实现(苦心研究多天才解决!)
- 抛一个kalman滤波跟踪的封装类 c++版opencv实现
- SIFT算法的c++实现(VS2010+OpenCV2.3.1)
- Kmeans K均值聚类,OpenCV实现
- C++、OpenCV实现照相功能
- C++ OpenCV 实现RGB彩色图像转化成灰度图像再转换成二值图像
- SIFT算法的c++实现(VS2010+OpenCV2.3.1)
- 小波变换 C++ opencv 实现
- 用C++(OpenCV)自己实现彩色直方图均衡化