《机电传动控制》(2017)第四周作业
2017-03-10 07:05
148 查看
1. 结合教学进度自主阅读,并预习各种控制电机原理,网上查阅资料,在博客上对你目前所了解的各种传动和控制电机进行归类,继续在博客笔记上记录学习心得、难点和疑点。
2. 仿真和计算作业:
首先在PLECS上建立如下图所示的交流异步电机系统:
设置电机的参数如下图:
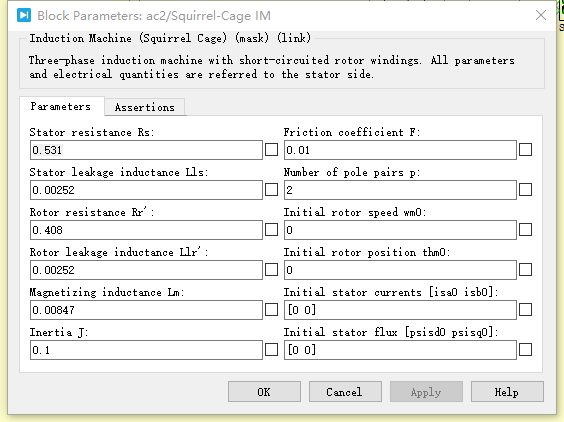
该电机模型参数参照了Novotny和Lipo的《Vector Control and Dynamics of AC Drives》第78页的一个例子参数并稍作修改。
其中:
额定频率:50 Hz 极对数:2 转动惯量:0.1 kg.m^2 定子电阻:0.531 Ohm 转子电阻:0.408 Ohm 定子漏感:2.52 mH 转子漏感:2.52 mH 互感:8.47 mH
设定三相电源频率为50Hz,220V,可以观察到如下定子电压(V)、定子电流(A)、转子电流(A)、转矩(Nm)、转速(rad/s)的波形:
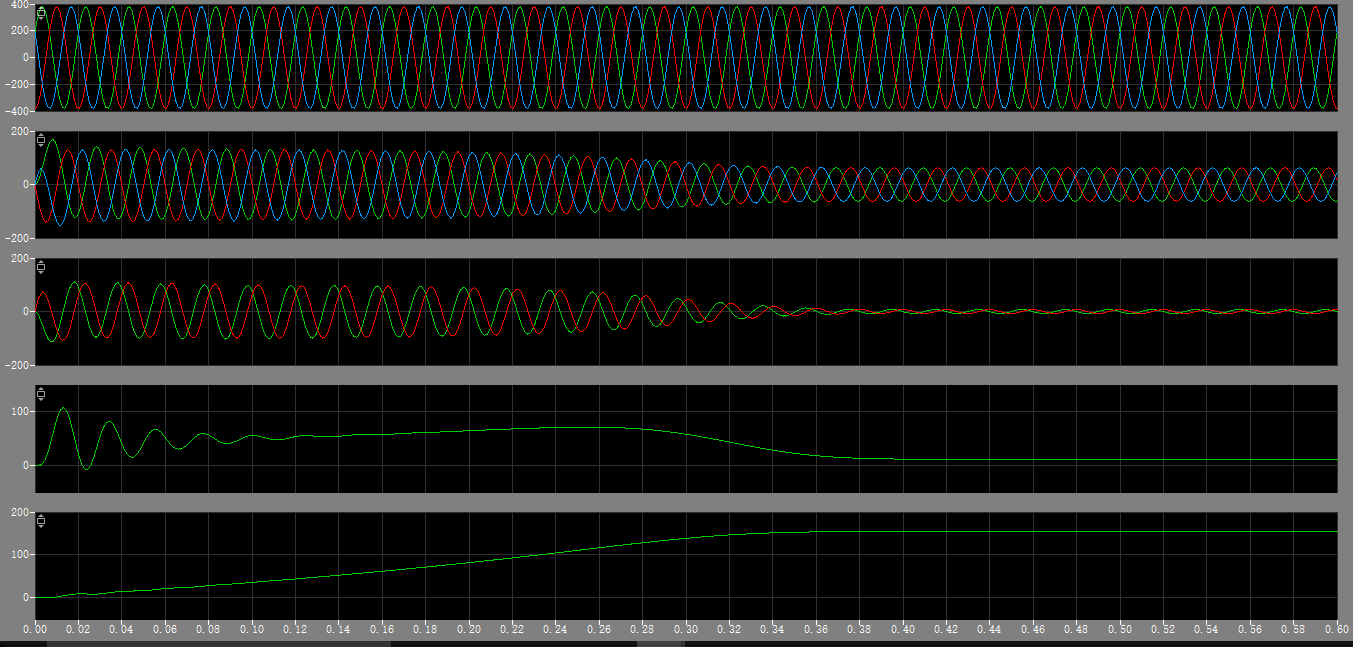
根据仿真数据画出该电机的固有机械特性近似图。
结合本周学习的交流电机原理及启动、调速、制动特性,在PLECS仿真环境下控制上述三相交流异步电机带动起重机起升机构运行。具体要求如下:
1)实现如下机械运动周期:控制电机带重物上升,从静止加速到800r/min 保持800r/min匀速运动0.5s, 减速到静止,保持静止状态0.5s, 带重物下降,从静止达到600r/min 保持600r/min匀速运动0.6s, 减速到静止。 (为了便于仿真,匀速和静止持续时间较短)
2) 升降机构和重物折算到到电机转子轴上的等效负载惯量为1Kg.m^2,折算到到电机转子轴上的等效负载转矩是15N.m。
3)电机参数统一使用本文提供的参数,如果控制策略中用到转子串电阻,允许将该电机的转子改为绕线式转子(参数不变)。
4)参照教材中给出的交流电机启动、调速和制动方法,设计控制策略。
5)可以采用定子串电阻、转子串电阻、定子调压、定子调频等手段,但必须具备工程上的可实施性。
6)评价指标:快速启动、制动,冲击转矩和冲击电流小,能耗小,兼顾实施的经济性。

相关文章推荐
- 《机电传动控制》第四周作业
- 《机电传动控制》(2017)第九周作业
- 《机电传动控制》(2017)第三周作业
- 《机电传动控制》(2017)第十一周作业
- 《机电传动控制》(2017)第二周作业
- 机电传动控制第四周作业
- 机电传动控制第四周作业
- 《机电传动控制》(2017)第五、六周作业
- 《机电传动控制》第四周仿真作业
- 机电传动控制第四周仿真作业
- 2017-2018-1 20155305 《信息安全系统设计基础》第四周学习总结(课堂提交作业未来得及提交码云链接myod补充博客)
- 《机电传动控制》(2017)综合作业
- 机电传动控制第四周仿真作业
- 机电传动控制第四周学习笔记和仿真作业
- 《机电传动控制》第四周作业
- 《机电传动控制》(2017)第一周作业
- 高级编程技术作业第四周 第七章课后练习
- 2017 软件工程 结对第二次作业
- 第四周——第八章函数作业
- 2017秋-软件工程第九次作业-第十周例行总结