mpu6050姿态解算与卡尔曼滤波(1)数学
2017-03-01 20:38
302 查看
定义地理坐标系n系:x轴指向东,y轴指向北,z轴指向天。在mpu6050芯片上定义载体坐标系b系。那么b系的姿态就是指n系与b系相对的旋转关系,即如何由n系旋转到b系。
描述这种旋转关系通常使用欧拉角(ψ,θ,γ)T,姿态矩阵T(3x3),四元数Q=(q0,q1,q2,q3)T。
欧拉角指的是将n系按照z轴->x’轴->y”轴的顺序依次转动 ψ,θ,γ 后就是b系,事实上欧拉角并没有规定转动顺序,以上转动顺序z轴->x’轴->y”轴为惯性导航中常使用的规定,(ψ,θ,γ)T依次命名为偏航、俯仰、滚转。
姿态矩阵T描述的是三维空间中的两个标准正交基之间的向量转换关系,T是一个3x3的正交阵。若一个向量在n系下的坐标为三维列向量xn,则该向量在b系下的坐标为xb=Tbn⋅xn,反之xn=Tnb⋅xb。T阵是一个正交矩阵,故Tbn与Tnb互为转置矩阵,互为逆矩阵。
四元数Q的本质涉及到更高等的数学,若仅考虑用四元数描述姿态,只需记住:描述姿态的四元数是归一化的,即:
|Q|=q20+q21+q22+q23−−−−−−−−−−−−−−√=1
每个归一化的四元数都描述了一个姿态,或者说描述了一个可由n系旋转得到的b坐标系。
以上三种描述方式是相互等价的,只要确定了两个坐标系的旋转关系,那么就唯一地确定了一组欧拉角,也唯一地确定了一个姿态矩阵和归一化四元数。三种描述方式可以互相推导,由欧拉角可以推导出姿态矩阵,再由姿态矩阵可以推导出四元数。同样,由四元数可以得到姿态矩阵,再得到欧拉角。
改正:以上三种描述方式是等价的,但是要注意对于两个确定的旋转关系的坐标系,表示两者旋转关系的三种方式中,姿态矩阵一定是唯一的,但是四元数却可以有两个,而欧拉角可以有很多。在做彼此的转换,尤其是涉及到四元数表示的时候,一定要注意。
转换关系如下:
由欧拉角ψ,θ,γ得到姿态矩阵Tbn:
绕z轴旋转矩阵Tz:Tz=⎡⎣⎢cosψ−sinψ0sinψcosψ0001⎤⎦⎥
绕x轴旋转矩阵Tx:
Tx=⎡⎣⎢1000cosθ−sinθ0sinθcosθ⎤⎦⎥
绕y轴旋转矩阵Ty:
Ty=⎡⎣⎢cosγ0sinγ010−sinγ0cosγ⎤⎦⎥
则姿态矩阵Tbn=Ty⋅Tx⋅Tz
所以:
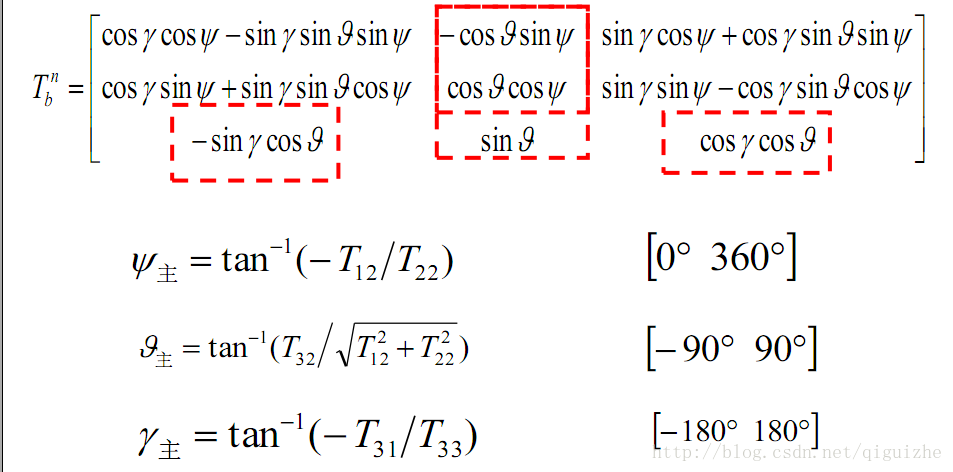
Tbn=⎡⎣⎢cosγcosψ+sinγsinθsinψ−cosθsinψsinγcosψ+cosγsinθsinψcosγsinψ+sinγsinθcosψcosθcosψsinγsinψ−cosγsinθcosψ−sinγcosθsinθcosγcosθ⎤⎦⎥
由姿态矩阵得到欧拉角ψ,θ,γ
由四元数 Q 转换到姿态矩阵T:
Tbn=⎡⎣⎢⎢q20+q21−q22−q232(q1q2−q0q3)2(q1q3+q0q2)2(q1q2+q0q3)q20−q21+q22−q232(q2q3−q0q1)2(q1q3−q0q2)2(q2q3+q0q1)q20−q21−q22+q23⎤⎦⎥⎥
由姿态矩阵转换到四元数:
由矩阵 T 的对角线元素可知:
q20+q21−q22−q23=T11q20−q21+q22−q23=T22q20−q21−q22+q23=T33q20+q21+q22+q23=1
故而有
|q1|=121+T11−T22−T33−−−−−−−−−−−−−−−√|q2|=121−T11+T22−T33−−−−−−−−−−−−−−−√|q3|=121−T11−T22+T33−−−−−−−−−−−−−−−√|q0|=1−q21−q22−q23−−−−−−−−−−−−−√
其中,正负号如下:
sign(q0)=+sign(q1)=sign(T32−T23)sign(q2)=sign(T13−T31)sign(q3)=sign(T21−T12)
——————————————————————————————————————————————————————————
考虑这样一个问题:若b系相对n系的欧拉角为(ψ,θ,γ),以角速度 ωnb 转动了Δt时间,注意角速度ωnb 是一个三维向量,那么欧拉角的变化量(Δψ,Δθ,Δγ)应该是多少呢?这个问题旨在找出欧拉角的变化速率与转动角速度的关系,以下给出这个关系。
欧拉角微分方程
⎡⎣⎢ψ˙θ˙γ˙⎤⎦⎥=1cosθ⎡⎣⎢−sinγcosγcosθsinθsinγ00cosθcosγsinγcosθ−sinθcosγ⎤⎦⎥⎡⎣⎢⎢ωbnbxωbnbyωbnbz⎤⎦⎥⎥
上式中 ωbnbx 表示转动角速度 ωnb 在b坐标系x轴上的投影,也就是固连在转动物体上的三轴陀螺仪测量的角速度。若已知t0时刻的欧拉角(ψ,θ,γ),以及从t0到t时刻的角速度曲线,那么t时刻的欧拉角自然是可以计算出的,这是一个求解一阶微分方程组的问题。
然而欧拉角微分方程是一个非线性微分方程组,它的解析解并不能以简单函数的形式表达出来。若把目光投向姿态矩阵和四元数,亦有微分方程如下:
姿态矩阵微分方程
⎡⎣⎢⎢T˙11T˙21T˙31T˙12T˙22T˙32T˙13T˙23T˙33⎤⎦⎥⎥=⎡⎣⎢T11T21T31T12T22T32T13T23T33⎤⎦⎥⎡⎣⎢⎢0ωbnbz−ωbnby−ωbnbz0ωbnbxωbnby−ωbnbx0⎤⎦⎥⎥
四元微分方程:
⎡⎣⎢⎢⎢⎢q˙0q˙1q˙2q˙3⎤⎦⎥⎥⎥⎥=12⎡⎣⎢⎢⎢⎢⎢⎢0ωbnbxωbnbyωbnbz−ωbnbx0−ωbnbzωbnby−ωbnbyωbnbz0−ωbnbx−ωbnbz−ωbnbyωbnbx0⎤⎦⎥⎥⎥⎥⎥⎥⎡⎣⎢⎢⎢⎢q0q1q2q3⎤⎦⎥⎥⎥⎥
到这里,对于载体的姿态问题就有了一个解决办法:在载体上安装相互正交的三个陀螺仪,测量载体相对导航坐标系的转动,选取欧拉角/姿态矩阵/四元数描述姿态,按照微分方程积分,就可以得到姿态了。
若以四元数描述姿态,则一个典型公式为:
⎡⎣⎢⎢⎢⎢q0q1q2q3⎤⎦⎥⎥⎥⎥k+1=⎡⎣⎢⎢⎢⎢q0q1q2q3⎤⎦⎥⎥⎥⎥k+⎡⎣⎢⎢⎢⎢q˙0q˙1q˙2q˙3⎤⎦⎥⎥⎥⎥Δt
若记[ω×]=⎡⎣⎢⎢⎢⎢⎢⎢0ωbnbxωbnbyωbnbz−ωbnbx0−ωbnbzωbnby−ωbnbyωbnbz0−ωbnbx−ωbnbz−ωbnbyωbnbx0⎤⎦⎥⎥⎥⎥⎥⎥
则Qk+1={I4×4+12[ω×]}Qk
由于这是一个积分的做法,在实际应用中不可避免的会出现误差发散,长时间之后这个办法给出的姿态就不具有太高的可信度了。此外实际应用中还需注意一个问题,由于角速度测量的误差,四元数/姿态矩阵在一段时间后可能会不满足归一性/正交性,需要对四元数/姿态矩阵做归一化/正交化处理。
——————————————————————————————————————————————————————————
关于mpu6050加速度计,很多人可能无法理解为什么在相对n系静止的情况下加速度计会测量到一个与重力加速度相反的加速度,建议阅读这篇知乎专栏文章中关于加速度计的部分:https://zhuanlan.zhihu.com/p/20082486这里对加速度计的测量解释的较为形象。
理想的载体相对n系无加速度状态下,加速度计的测量为:
⎡⎣⎢axayaz⎤⎦⎥=Tbn⎡⎣⎢00g⎤⎦⎥=⎡⎣⎢cosγcosψ+sinγsinθsinψ−cosθsinψsinγcosψ+cosγsinθsinψcosγsinψ+sinγsinθcosψcosθcosψsinγsinψ−cosγsinθcosψ−sinγcosθsinθcosγcosθ⎤⎦⎥⎡⎣⎢00g⎤⎦⎥=⎡⎣⎢−gsinγcosθgsinθgcosγcosθ⎤⎦⎥
可以看到,在载体本身无加速度的情况下,加速度计的测量输出是与 ψ 无关的,也就是说加速度计只能反映姿态的一部分信息,仅凭加速度计的测量并不能唯一确定一个姿态,这是显而易见的。
要测量姿态,我们至少需要在b系下测量两个n系下已知的向量,很容易想到,引入磁场传感器测量地磁向量,这样就能唯一地计算出姿态矩阵,从而确定载体的姿态。
若考虑载体本身的加速度,如果不依靠其他手段对载体本身的加速度做出估计,那么加速度计的测量就既与载体姿态变化有关,亦与载体加速度有关。
描述这种旋转关系通常使用欧拉角(ψ,θ,γ)T,姿态矩阵T(3x3),四元数Q=(q0,q1,q2,q3)T。
欧拉角指的是将n系按照z轴->x’轴->y”轴的顺序依次转动 ψ,θ,γ 后就是b系,事实上欧拉角并没有规定转动顺序,以上转动顺序z轴->x’轴->y”轴为惯性导航中常使用的规定,(ψ,θ,γ)T依次命名为偏航、俯仰、滚转。
姿态矩阵T描述的是三维空间中的两个标准正交基之间的向量转换关系,T是一个3x3的正交阵。若一个向量在n系下的坐标为三维列向量xn,则该向量在b系下的坐标为xb=Tbn⋅xn,反之xn=Tnb⋅xb。T阵是一个正交矩阵,故Tbn与Tnb互为转置矩阵,互为逆矩阵。
四元数Q的本质涉及到更高等的数学,若仅考虑用四元数描述姿态,只需记住:描述姿态的四元数是归一化的,即:
|Q|=q20+q21+q22+q23−−−−−−−−−−−−−−√=1
每个归一化的四元数都描述了一个姿态,或者说描述了一个可由n系旋转得到的b坐标系。
以上三种描述方式是相互等价的,只要确定了两个坐标系的旋转关系,那么就唯一地确定了一组欧拉角,也唯一地确定了一个姿态矩阵和归一化四元数。三种描述方式可以互相推导,由欧拉角可以推导出姿态矩阵,再由姿态矩阵可以推导出四元数。同样,由四元数可以得到姿态矩阵,再得到欧拉角。
改正:以上三种描述方式是等价的,但是要注意对于两个确定的旋转关系的坐标系,表示两者旋转关系的三种方式中,姿态矩阵一定是唯一的,但是四元数却可以有两个,而欧拉角可以有很多。在做彼此的转换,尤其是涉及到四元数表示的时候,一定要注意。
转换关系如下:
由欧拉角ψ,θ,γ得到姿态矩阵Tbn:
绕z轴旋转矩阵Tz:Tz=⎡⎣⎢cosψ−sinψ0sinψcosψ0001⎤⎦⎥
绕x轴旋转矩阵Tx:
Tx=⎡⎣⎢1000cosθ−sinθ0sinθcosθ⎤⎦⎥
绕y轴旋转矩阵Ty:
Ty=⎡⎣⎢cosγ0sinγ010−sinγ0cosγ⎤⎦⎥
则姿态矩阵Tbn=Ty⋅Tx⋅Tz
所以:
Tbn=⎡⎣⎢cosγcosψ+sinγsinθsinψ−cosθsinψsinγcosψ+cosγsinθsinψcosγsinψ+sinγsinθcosψcosθcosψsinγsinψ−cosγsinθcosψ−sinγcosθsinθcosγcosθ⎤⎦⎥
由姿态矩阵得到欧拉角ψ,θ,γ
由四元数 Q 转换到姿态矩阵T:
Tbn=⎡⎣⎢⎢q20+q21−q22−q232(q1q2−q0q3)2(q1q3+q0q2)2(q1q2+q0q3)q20−q21+q22−q232(q2q3−q0q1)2(q1q3−q0q2)2(q2q3+q0q1)q20−q21−q22+q23⎤⎦⎥⎥
由姿态矩阵转换到四元数:
由矩阵 T 的对角线元素可知:
q20+q21−q22−q23=T11q20−q21+q22−q23=T22q20−q21−q22+q23=T33q20+q21+q22+q23=1
故而有
|q1|=121+T11−T22−T33−−−−−−−−−−−−−−−√|q2|=121−T11+T22−T33−−−−−−−−−−−−−−−√|q3|=121−T11−T22+T33−−−−−−−−−−−−−−−√|q0|=1−q21−q22−q23−−−−−−−−−−−−−√
其中,正负号如下:
sign(q0)=+sign(q1)=sign(T32−T23)sign(q2)=sign(T13−T31)sign(q3)=sign(T21−T12)
——————————————————————————————————————————————————————————
考虑这样一个问题:若b系相对n系的欧拉角为(ψ,θ,γ),以角速度 ωnb 转动了Δt时间,注意角速度ωnb 是一个三维向量,那么欧拉角的变化量(Δψ,Δθ,Δγ)应该是多少呢?这个问题旨在找出欧拉角的变化速率与转动角速度的关系,以下给出这个关系。
欧拉角微分方程
⎡⎣⎢ψ˙θ˙γ˙⎤⎦⎥=1cosθ⎡⎣⎢−sinγcosγcosθsinθsinγ00cosθcosγsinγcosθ−sinθcosγ⎤⎦⎥⎡⎣⎢⎢ωbnbxωbnbyωbnbz⎤⎦⎥⎥
上式中 ωbnbx 表示转动角速度 ωnb 在b坐标系x轴上的投影,也就是固连在转动物体上的三轴陀螺仪测量的角速度。若已知t0时刻的欧拉角(ψ,θ,γ),以及从t0到t时刻的角速度曲线,那么t时刻的欧拉角自然是可以计算出的,这是一个求解一阶微分方程组的问题。
然而欧拉角微分方程是一个非线性微分方程组,它的解析解并不能以简单函数的形式表达出来。若把目光投向姿态矩阵和四元数,亦有微分方程如下:
姿态矩阵微分方程
⎡⎣⎢⎢T˙11T˙21T˙31T˙12T˙22T˙32T˙13T˙23T˙33⎤⎦⎥⎥=⎡⎣⎢T11T21T31T12T22T32T13T23T33⎤⎦⎥⎡⎣⎢⎢0ωbnbz−ωbnby−ωbnbz0ωbnbxωbnby−ωbnbx0⎤⎦⎥⎥
四元微分方程:
⎡⎣⎢⎢⎢⎢q˙0q˙1q˙2q˙3⎤⎦⎥⎥⎥⎥=12⎡⎣⎢⎢⎢⎢⎢⎢0ωbnbxωbnbyωbnbz−ωbnbx0−ωbnbzωbnby−ωbnbyωbnbz0−ωbnbx−ωbnbz−ωbnbyωbnbx0⎤⎦⎥⎥⎥⎥⎥⎥⎡⎣⎢⎢⎢⎢q0q1q2q3⎤⎦⎥⎥⎥⎥
到这里,对于载体的姿态问题就有了一个解决办法:在载体上安装相互正交的三个陀螺仪,测量载体相对导航坐标系的转动,选取欧拉角/姿态矩阵/四元数描述姿态,按照微分方程积分,就可以得到姿态了。
若以四元数描述姿态,则一个典型公式为:
⎡⎣⎢⎢⎢⎢q0q1q2q3⎤⎦⎥⎥⎥⎥k+1=⎡⎣⎢⎢⎢⎢q0q1q2q3⎤⎦⎥⎥⎥⎥k+⎡⎣⎢⎢⎢⎢q˙0q˙1q˙2q˙3⎤⎦⎥⎥⎥⎥Δt
若记[ω×]=⎡⎣⎢⎢⎢⎢⎢⎢0ωbnbxωbnbyωbnbz−ωbnbx0−ωbnbzωbnby−ωbnbyωbnbz0−ωbnbx−ωbnbz−ωbnbyωbnbx0⎤⎦⎥⎥⎥⎥⎥⎥
则Qk+1={I4×4+12[ω×]}Qk
由于这是一个积分的做法,在实际应用中不可避免的会出现误差发散,长时间之后这个办法给出的姿态就不具有太高的可信度了。此外实际应用中还需注意一个问题,由于角速度测量的误差,四元数/姿态矩阵在一段时间后可能会不满足归一性/正交性,需要对四元数/姿态矩阵做归一化/正交化处理。
——————————————————————————————————————————————————————————
关于mpu6050加速度计,很多人可能无法理解为什么在相对n系静止的情况下加速度计会测量到一个与重力加速度相反的加速度,建议阅读这篇知乎专栏文章中关于加速度计的部分:https://zhuanlan.zhihu.com/p/20082486这里对加速度计的测量解释的较为形象。
理想的载体相对n系无加速度状态下,加速度计的测量为:
⎡⎣⎢axayaz⎤⎦⎥=Tbn⎡⎣⎢00g⎤⎦⎥=⎡⎣⎢cosγcosψ+sinγsinθsinψ−cosθsinψsinγcosψ+cosγsinθsinψcosγsinψ+sinγsinθcosψcosθcosψsinγsinψ−cosγsinθcosψ−sinγcosθsinθcosγcosθ⎤⎦⎥⎡⎣⎢00g⎤⎦⎥=⎡⎣⎢−gsinγcosθgsinθgcosγcosθ⎤⎦⎥
可以看到,在载体本身无加速度的情况下,加速度计的测量输出是与 ψ 无关的,也就是说加速度计只能反映姿态的一部分信息,仅凭加速度计的测量并不能唯一确定一个姿态,这是显而易见的。
要测量姿态,我们至少需要在b系下测量两个n系下已知的向量,很容易想到,引入磁场传感器测量地磁向量,这样就能唯一地计算出姿态矩阵,从而确定载体的姿态。
若考虑载体本身的加速度,如果不依靠其他手段对载体本身的加速度做出估计,那么加速度计的测量就既与载体姿态变化有关,亦与载体加速度有关。

相关文章推荐
- 数学基础IV——根据坐标系旋转建立欧拉微分方程解算姿态
- mpu6050姿态解算与卡尔曼滤波(3)加速度计标定
- mpu6050姿态解算原理
- 四元数姿态解算基础及数学模型
- mpu6050姿态解算与卡尔曼滤波(2)卡尔曼滤波
- 姿态解算
- 四旋翼姿态解算——互补滤波算法及理论推导
- MPU6050姿态结算(采用硬件I2C实现数据融合算法)
- 导航姿态解算——基础理论及推导
- 卡尔曼(Kalman)滤波(六)--卡尔曼滤波的应用: 四元数卡尔曼滤波(QKF)的C代码实现姿态解算
- 姿态解算系列一:经验型卡尔曼数据融合
- 基于MPU6050三轴陀螺仪和三轴加速度传感器姿态识别实验
- 四元数AHRS姿态解算和IMU姿态解算分析
- 四旋翼姿态解算——互补滤波算法及理论推导
- MPU6050滤波、姿态融合(一阶互补、卡尔曼)
- 无名飞控姿态解算和控制(一)
- 软件姿态解算
- 四元数姿态解算及多传感器融合详细解析
- 姿态解算(二),姿态更新
- 卡尔曼滤波