PCL滤波介绍(3)
2017-02-27 14:17
141 查看
(1)从一个点云中提取索引
如何使用一个,基于某一分割算法提取点云中的一个子集。
代码解析
结果:

显示出来:

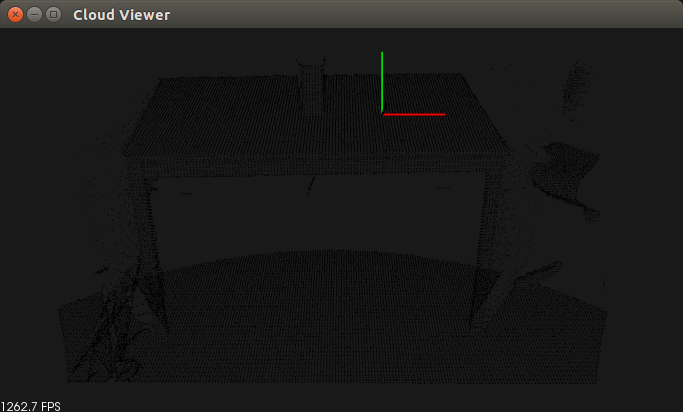
图1 原始点云图像 图2 下采样后点云数据
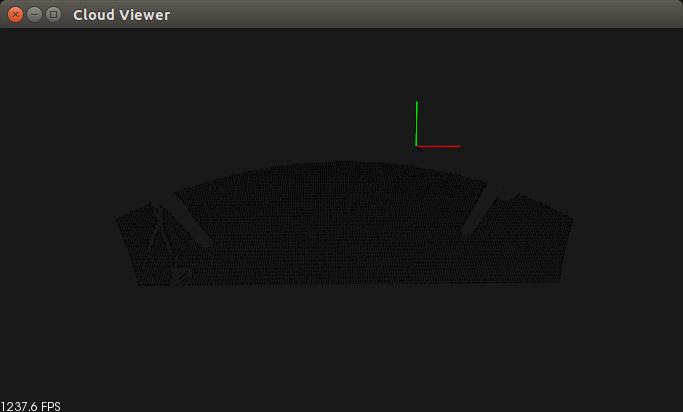
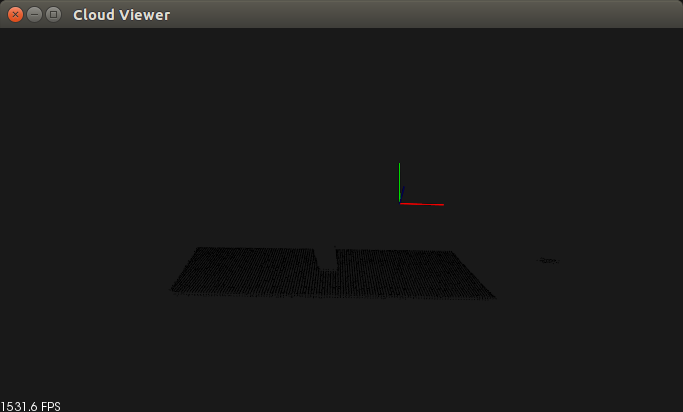
图3 分割得到的其一平面模型 图4 分割得到的其二平面模型
(2)使用ConditionalRemoval 或RadiusOutlinerRemoval移除离群点
如何在滤波模块使用几种不同的方法移除离群点,对于ConditionalRemoval滤波器,可以一次删除满足对输入的点云设定的一个或多个条件指标的所有的数据点,RadiusOutlinerRemoval滤波器,它可以删除在输入点云一定范围内没有至少达到足够多近邻的所有数据点。
关于RadiusOutlinerRemoval的理解,在点云数据中,设定每个点一定范围内周围至少有足够多的近邻,不满足就会被删除
关于ConditionalRemoval 这个滤波器删除点云中不符合用户指定的一个或者多个条件的数据点
新建文件remove_outliers.cpp
编译运行的结果为
从中可以看出ConditionalRemoval 或RadiusOutlinerRemoval的区别
RadiusOutlinerRemoval比较适合去除单个的离群点 ConditionalRemoval 比较灵活,可以根据用户设置的条件灵活过滤
微信公众号号可扫描二维码一起共同学习交流

如何使用一个,基于某一分割算法提取点云中的一个子集。
代码解析
#include <iostream>
#include <pcl/ModelCoefficients.h>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/sample_consensus/method_types.h>
#include <pcl/sample_consensus/model_types.h>
#include <pcl/segmentation/sac_segmentation.h>
#include <pcl/filters/voxel_grid.h>
#include <pcl/filters/extract_indices.h>
int
main (int argc, char** argv)
{
/**********************************************************************************************************
从输入的.PCD 文件载入数据后,创建一个VOxelGrid滤波器对数据进行下采样,在这里进行下才样是为了加速处理过程,
越少的点意味着分割循环中处理起来越快
**********************************************************************************************************/
pcl::PCLPointCloud2::Ptr cloud_blob (new pcl::PCLPointCloud2), cloud_filtered_blob (new pcl::PCLPointCloud2);//申明滤波前后的点云
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_filtered (new pcl::PointCloud<pcl::PointXYZ>), cloud_p (new pcl::PointCloud<pcl::PointXYZ>), cloud_f (new pcl::PointCloud<pcl::PointXYZ>);
// 读取PCD文件
pcl::PCDReader reader;
reader.read ("table_scene_lms400.pcd", *cloud_blob);
//统计滤波前的点云个数
std::cerr << "PointCloud before filtering: " << cloud_blob->width * cloud_blob->height << " data points." << std::endl;
// 创建体素栅格下采样: 下采样的大小为1cm
pcl::VoxelGrid<pcl::PCLPointCloud2> sor; //体素栅格下采样对象
sor.setInputCloud (cloud_blob); //原始点云
sor.setLeafSize (0.01f, 0.01f, 0.01f); // 设置采样体素大小
sor.filter (*cloud_filtered_blob); //保存
// 转换为模板点云
pcl::fromPCLPointCloud2 (*cloud_filtered_blob, *cloud_filtered);
std::cerr << "PointCloud after filtering: " << cloud_filtered->width * cloud_filtered->height << " data points." << std::endl;
// 保存下采样后的点云
pcl::PCDWriter writer;
writer.write<pcl::PointXYZ> ("table_scene_lms400_downsampled.pcd", *cloud_filtered, false);
pcl::ModelCoefficients::Ptr coefficients (new pcl::ModelCoefficients ());
pcl::PointIndices::Ptr inliers (new pcl::PointIndices ());
pcl::SACSegmentation<pcl::PointXYZ> seg; //创建分割对象
seg.setOptimizeCoefficients (true); //设置对估计模型参数进行优化处理
seg.setModelType (pcl::SACMODEL_PLANE); //设置分割模型类别
seg.setMethodType (pcl::SAC_RANSAC); //设置用哪个随机参数估计方法
seg.setMaxIterations (1000); //设置最大迭代次数
seg.setDistanceThreshold (0.01); //判断是否为模型内点的距离阀值
// 设置ExtractIndices的实际参数
pcl::ExtractIndices<pcl::PointXYZ> extract; //创建点云提取对象
int i = 0, nr_points = (int) cloud_filtered->points.size ();
// While 30% of the original cloud is still there
while (cloud_filtered->points.size () > 0.3 * nr_points)
{
// 为了处理点云包含的多个模型,在一个循环中执行该过程并在每次模型被提取后,保存剩余的点进行迭代
seg.setInputCloud (cloud_filtered);
seg.segment (*inliers, *coefficients);
if (inliers->indices.size () == 0)
{
std::cerr << "Could not estimate a planar model for the given dataset." << std::endl;
break;
}
// Extract the inliers
extract.setInputCloud (cloud_filtered);
extract.setIndices (inliers);
extract.setNegative (false);
extract.filter (*cloud_p);
std::cerr << "PointCloud representing the planar component: " << cloud_p->width * cloud_p->height << " data points." << std::endl;
std::stringstream ss;
ss << "table_scene_lms400_plane_" << i << ".pcd";
writer.write<pcl::PointXYZ> (ss.str (), *cloud_p, false);
// Create the filtering object
extract.setNegative (true);
extract.filter (*cloud_f);
cloud_filtered.swap (cloud_f);
i++;
}
return (0);
}结果:
显示出来:
图1 原始点云图像 图2 下采样后点云数据
图3 分割得到的其一平面模型 图4 分割得到的其二平面模型
(2)使用ConditionalRemoval 或RadiusOutlinerRemoval移除离群点
如何在滤波模块使用几种不同的方法移除离群点,对于ConditionalRemoval滤波器,可以一次删除满足对输入的点云设定的一个或多个条件指标的所有的数据点,RadiusOutlinerRemoval滤波器,它可以删除在输入点云一定范围内没有至少达到足够多近邻的所有数据点。
关于RadiusOutlinerRemoval的理解,在点云数据中,设定每个点一定范围内周围至少有足够多的近邻,不满足就会被删除
关于ConditionalRemoval 这个滤波器删除点云中不符合用户指定的一个或者多个条件的数据点
新建文件remove_outliers.cpp
#include <iostream>
#include <pcl/point_types.h>
#include <pcl/filters/radius_outlier_removal.h>
#include <pcl/filters/conditional_removal.h>
int
main (int argc, char** argv)
{
if (argc != 2) //确保输入的参数
{
std::cerr << "please specify command line arg '-r' or '-c'" << std::endl;
exit(0);
}
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_filtered (new pcl::PointCloud<pcl::PointXYZ>);
//填充点云
cloud->width = 5;
cloud->height = 1;
cloud->points.resize (cloud->width * cloud->height);
for (size_t i = 0; i < cloud->points.size (); ++i)
{
cloud->points[i].x = 1024 * rand () / (RAND_MAX + 1.0f);
cloud->points[i].y = 1024 * rand () / (RAND_MAX + 1.0f);
cloud->points[i].z = 1024 * rand () / (RAND_MAX + 1.0f);
}
if (strcmp(argv[1], "-r") == 0){
pcl::RadiusOutlierRemoval<pcl::PointXYZ> outrem; //创建滤波器
outrem.setInputCloud(cloud); //设置输入点云
outrem.setRadiusSearch(0.8); //设置半径为0.8的范围内找临近点
outrem.setMinNeighborsInRadius (2); //设置查询点的邻域点集数小于2的删除
// apply filter
outrem.filter (*cloud_filtered); //执行条件滤波 在半径为0.8 在此半径内必须要有两个邻居点,此点才会保存
}
else if (strcmp(argv[1], "-c") == 0){
//创建条件限定的下的滤波器
pcl::ConditionAnd<pcl::PointXYZ>::Ptr range_cond (new
pcl::ConditionAnd<pcl::PointXYZ> ()); //创建条件定义对象
//为条件定义对象添加比较算子
range_cond->addComparison (pcl::FieldComparison<pcl::PointXYZ>::ConstPtr (new
pcl::FieldComparison<pcl::PointXYZ> ("z", pcl::ComparisonOps::GT, 0.0))); //添加在Z字段上大于0的比较算子
range_cond->addComparison (pcl::FieldComparison<pcl::PointXYZ>::ConstPtr (new
pcl::FieldComparison<pcl::PointXYZ> ("z", pcl::ComparisonOps::LT, 0.8))); //添加在Z字段上小于0.8的比较算子
// 创建滤波器并用条件定义对象初始化
pcl::ConditionalRemoval<pcl::PointXYZ> condrem;
condrem.setCondition (range_cond);
condrem.setInputCloud (cloud); //输入点云
condrem.setKeepOrganized(true); //设置保持点云的结构
// 执行滤波
condrem.filter (*cloud_filtered); //大于0.0小于0.8这两个条件用于建立滤波器
}
else{
std::cerr << "please specify command line arg '-r' or '-c'" << std::endl;
exit(0);
}
std::cerr << "Cloud before filtering: " << std::endl;
for (size_t i = 0; i < cloud->points.size (); ++i)
std::cerr << " " << cloud->points[i].x << " "
<< cloud->points[i].y << " "
<< cloud->points[i].z << std::endl;
// display pointcloud after filtering
std::cerr << "Cloud after filtering: " << std::endl;
for (size_t i = 0; i < cloud_filtered->points.size (); ++i)
std::cerr << " " << cloud_filtered->points[i].x << " "
<< cloud_filtered->points[i].y << " "
<< cloud_filtered->points[i].z << std::endl;
return (0);
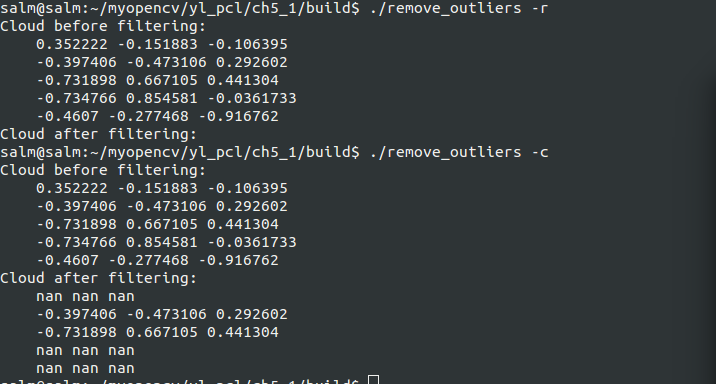
}编译运行的结果为
从中可以看出ConditionalRemoval 或RadiusOutlinerRemoval的区别
RadiusOutlinerRemoval比较适合去除单个的离群点 ConditionalRemoval 比较灵活,可以根据用户设置的条件灵活过滤
微信公众号号可扫描二维码一起共同学习交流

相关文章推荐
- PCL滤波介绍(1)
- PCL滤波介绍(2)
- PCL滤波介绍(3)
- PCL滤波介绍(1)
- PCL滤波介绍(2)
- PCL中分割方法的介绍(3)
- 常用的pcl滤波
- 归一化滤波,高斯滤波,非线性滤波及图像金字塔介绍与应用
- pcl学习——滤波(直通滤波器与统计滤波器)
- PCL滤波基础
- 图像处理之均值滤波介绍及C算法实现
- [PCL]点云渐进形态学滤波
- 各项异性滤波简单介绍Anisotropic Filtering(AF)
- PCL—低层次视觉—点云滤波(基于点云频率)
- 图像处理之均值滤波介绍及C算法实现
- 第四章输入/输出(I/O)4.2PCL中I/O模块及类介绍
- PCL 点云索引方法K维树(KD-tree)和八叉树(octree)介绍
- PCL中使用直通滤波器对点云进行滤波处理
- PCL—低层次视觉—点云滤波(初步处理)
- ROS/PCL条件滤波