ORB-SLAM代码详解之代码框架
2017-02-08 21:31
741 查看
工具篇
ORB-SLAM的代码框架
转载请注明出处:http://blog.csdn.net/c602273091/article/details/54933404
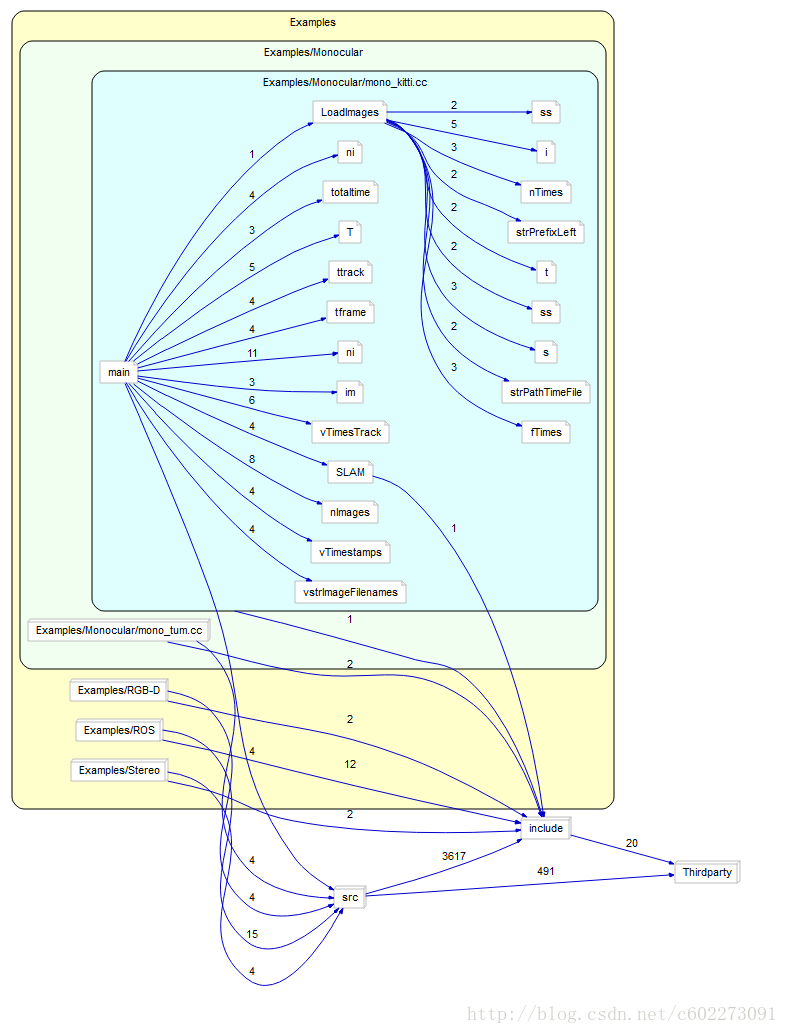
在这里我主要分析的是单目SLAM中的kitti数据集的流程图。
接下来从main函数开始抽丝剥茧:
整个main函数看下来,真正有价值的地方在于:
SLAM系统初始化:ORB_SLAM2::System
SLAM(argv[1],argv[2],ORB_SLAM2::System::MONOCULAR,true);
SLAM系统的追踪部分:SLAM.TrackMonocular(im,tframe);
次要的地方是
线程关闭:SLAM.Shutdown();
保存整条轨迹: SLAM.SaveKeyFrameTrajectoryTUM(“KeyFrameTrajectory.txt”); 看了源码我觉得如果是kitti的数据集的话,应该调用SaveTrajectoryKITTI
当然在看代码之前把ORB-SLAM的论文看一遍非常重要。对于这片论文的介绍,可以看我的系列文章【2】【3】【4】。
参考链接:
【1】understand下载: http://www.qqtn.com/down/91669.html
【2】http://blog.csdn.net/c602273091/article/details/54348202
【3】http://blog.csdn.net/c602273091/article/details/54411989
【4】http://blog.csdn.net/c602273091/article/details/54428693
ORB-SLAM的代码框架
转载请注明出处:http://blog.csdn.net/c602273091/article/details/54933404
工具篇
在看代码方面,有不少软件推荐。我觉得首推还是得Understand【1】,这个工具可以把代码的流程图、依赖关系、整个框架给描述出来。有钱的话,买正版。其次的话,我推荐SourceInsight。这个工具比较方便看出你的类的定义。我在使用的时候一般是上面一半是代码,下面一半看类的定义。这样看代码就是事半功倍。ORB-SLAM的代码框架
在这里我主要分析的是单目SLAM中的kitti数据集的流程图。
接下来从main函数开始抽丝剥茧:
/**
* This file is part of ORB-SLAM2.
*
* Copyright (C) 2014-2016 Ra煤l Mur-Artal <raulmur at unizar dot es> (University of Zaragoza)
* For more information see <https://github.com/raulmur/ORB_SLAM2>
*
* ORB-SLAM2 is free software: you can redistribute it and/or modify
* it under the terms of the GNU General Public License as published by
* the Free Software Foundation, either version 3 of the License, or
* (at your option) any later version.
*
* ORB-SLAM2 is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* You should have received a copy of the GNU General Public License
* along with ORB-SLAM2. If not, see <http://www.gnu.org/licenses/>.
*/
#include<iostream>
#include<algorithm>
#include<fstream>
#include<chrono>
#include<iomanip>
#include<opencv2/core/core.hpp>
#include"System.h"
using namespace std;
// 从文件夹中load图片进来
void LoadImages(const string &strSequence, vector<string> &vstrImageFilenames,
vector<double> &vTimestamps);
int main(int argc, char **argv)
{
// 判断参数是否符合规范
// ./mono_kitti path_to_vocabulary path_to_settings path_to_sequence
// 一共有四个参数:可执行文件argv[0]、字典的目录argv[1]、配置的路径argv[2]、图片序列的路径argv[3]
if(argc != 4)
{
cerr << endl << "Usage: ./mono_kitti path_to_vocabulary path_to_settings path_to_sequence" << endl;
return 1;
}
// Retrieve paths to images
vector<string> vstrImageFilenames;
vector<double> vTimestamps;
// 加载图片,传入图片路径、传回的是图片的文件名、每幅图片的时间戳
LoadImages(string(argv[3]), vstrImageFilenames, vTimestamps);
// 图片的个数
int nImages = vstrImageFilenames.size();
// 对SLAM系统进行初始化,传入字典和配置的路径
// Create SLAM system. It initializes all system threads and gets ready to process frames.
ORB_SLAM2::System SLAM(argv[1],argv[2],ORB_SLAM2::System::MONOCULAR,true);
// Vector for tracking time statistics
vector<float> vTimesTrack;
// 计算追踪所花的时间
vTimesTrack.resize(nImages);
cout << endl << "-------" << endl;
cout << "Start processing sequence ..." << endl;
cout << "Images in the sequence: " << nImages << endl << endl;
// Main loop
cv::Mat im;
for(int ni=0; ni<nImages; ni++)
{
// Read image from file
im = cv::imread(vstrImageFilenames[ni],CV_LOAD_IMAGE_UNCHANGED);
double tframe = vTimestamps[ni];
if(im.empty())
{
cerr << endl << "Failed to load image at: " << vstrImageFilenames[ni] << endl;
return 1;
}
#ifdef COMPILEDWITHC11
// 如果编译器可以编译c++11
// 获取当前时间
std::chrono::steady_clock::time_point t1 = std::chrono::steady_clock::now();
#else
std::chrono::monotonic_clock::time_point t1 = std::chrono::monotonic_clock::now();
#endif
// Pass the image to the SLAM system
// 图片放入SLAM系统中进行追踪
SLAM.TrackMonocular(im,tframe);
#ifdef COMPILEDWITHC11
std::chrono::steady_clock::time_point t2 = std::chrono::steady_clock::now();
#else
std::chrono::monotonic_clock::time_point t2 = std::chrono::monotonic_clock::now();
#endif
double ttrack= std::chrono::duration_cast<std::chrono::duration<double> >(t2 - t1).count();
// 计算追踪该图片花的时间
vTimesTrack[ni]=ttrack;
// Wait to load the next frame
// 计算下一帧图片时间戳与当前时间戳的差值T,与追踪所需时间进行比较
// 如果有必要就将当前线程暂停sleep
// 主要是为了模拟时间情况,因为追踪结束以后下一帧可能还没来
double T=0;
if(ni<nImages-1)
T = vTimestamps[ni+1]-tframe;
else if(ni>0)
T = tframe-vTimestamps[ni-1];
if(ttrack<T)
usleep((T-ttrack)*1e6);
}
// Stop all threads
// 追踪完所有图片序列以后,关掉当前的线程
SLAM.Shutdown();
// Tracking time statistics
// 对追踪的部分进行一个统计
// 计算中位数,总数、平均值
sort(vTimesTrack.begin(),vTimesTrack.end());
float totaltime = 0;
for(int ni=0; ni<nImages; ni++)
{
totaltime+=vTimesTrack[ni];
}
cout << "-------" << endl << endl;
cout << "median tracking time: " << vTimesTrack[nImages/2] << endl;
cout << "mean tracking time: " << totaltime/nImages << endl;
// Save camera trajectory
// 保存整个相机的位姿的轨迹
SLAM.SaveKeyFrameTrajectoryTUM("KeyFrameTrajectory.txt");
return 0;
}
void LoadImages(const string &strPathToSequence, vector<string> &vstrImageFilenames, vector<double> &vTimestamps)
{
ifstream fTimes;
// 读4541幅图片的时间戳(kitti的00图片序列)
string strPathTimeFile = strPathToSequence + "/times.txt";
// string类型转化为char*类型
fTimes.open(strPathTimeFile.c_str());
while(!fTimes.eof())
{
string s;
getline(fTimes,s);
if(!s.empty())
{
// string类型转化为double类型
// 使用stringstream类型
stringstream ss;
ss << s;
double t;
ss >> t;
vTimestamps.push_back(t);
}
}
// 使用image_0目录下的文件,这是双目摄像头的左边的摄像头的序列
string strPrefixLeft = strPathToSequence + "/image_0/";
const int nTimes = vTimestamps.size();
vstrImageFilenames.resize(nTimes);
for(int i=0; i<nTimes; i++)
{
stringstream ss;
// 设置0~nTime-1的图片的路径
ss << setfill('0') << setw(6) << i;
vstrImageFilenames[i] = strPrefixLeft + ss.str() + ".png";
}
}整个main函数看下来,真正有价值的地方在于:
SLAM系统初始化:ORB_SLAM2::System
SLAM(argv[1],argv[2],ORB_SLAM2::System::MONOCULAR,true);
SLAM系统的追踪部分:SLAM.TrackMonocular(im,tframe);
次要的地方是
线程关闭:SLAM.Shutdown();
保存整条轨迹: SLAM.SaveKeyFrameTrajectoryTUM(“KeyFrameTrajectory.txt”); 看了源码我觉得如果是kitti的数据集的话,应该调用SaveTrajectoryKITTI
当然在看代码之前把ORB-SLAM的论文看一遍非常重要。对于这片论文的介绍,可以看我的系列文章【2】【3】【4】。
参考链接:
【1】understand下载: http://www.qqtn.com/down/91669.html
【2】http://blog.csdn.net/c602273091/article/details/54348202
【3】http://blog.csdn.net/c602273091/article/details/54411989
【4】http://blog.csdn.net/c602273091/article/details/54428693

相关文章推荐
- ORB-SLAM2详解1 框架说明
- SLAM入门之ORBSLAM2代码理解——系统框架
- ORB-SLAM2详解(二)代码逻辑
- ORB-Slam详解2 代码流程
- ORB-SLAM代码详解之SLAM.TrackMonocular
- ORB-SLAM2详解(二)代码逻辑
- ORB-SLAM代码详解之SLAM系统初始化
- ORB-SLAM2详解(一)简介
- ORB-SLAM2详解(三)自动地图初始化
- 详解CSS的Sass框架中代码注释的编写方法
- ROS SLAM代码框架概述
- Spring整合JUnit框架进行单元测试代码使用详解
- AngularJS框架中的双向数据绑定机制详解【减少需要重复的开发代码量】
- Spring整合JUnit框架进行单元测试代码使用详解
- ORB-SLAM2源码详解
- ORB-SLAM2详解(四)跟踪
- Spring整合JUnit框架进行单元测试代码使用详解
- Spring整合JUnit框架进行单元测试代码使用详解
- Android开发之常用框架WebView详解代码。超详细,送给初学者,完全掌握此控件