【Contiki学习】01.Contiki-stm32系统下实现serial-shell功能
2017-02-04 16:54
513 查看
一,背景介绍
之前通过网上收集资料(资料后期整理之后会在博客分享),在stm32上面跑通了,就是实现了简单的点灯程序,以及串口输出。
但是后期开发使用肯定需要用到shell,经过一番折腾后小有收获。
在这说一下开发环境:IAR+stm32vet6(ST官方库3.5+contiki3.0)
二,准备工作
1,在contiki源码中按照目录提取以下文件:
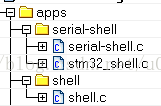
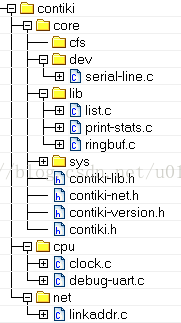
ps. stm32_shell.c是自行添加的代码
三,源码分析
1,先看一下main函数:
需要注意的是:
static int (* uart1_input_handler)(unsigned char c);再通过
这样就可以通过调用uart1_input_handler();将串口接到的数据导入serial_line中,从而可以通过serial_line_process进程进行命令分析做出相应处理。
uart1_input_handler();的调用写在串口中断中即可:
3,通过上面的处理已经把串口接收到的数据导入serial_line中了,当然串口配置初始化在这就不用多说了,
接下来就是要把shell进程加入系统了:
调用serial_shell_init()函数即可
定义:
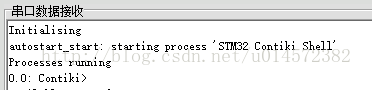
到这边就已经完成了shell的功能,可以通过串口看见
发送 help(加回车)
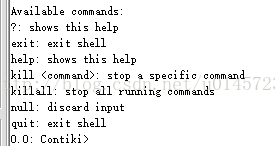
这是一些默认的命令,你也可以自己定义一些命令,通过阅读shell部分的源码进一步了解原理。
4,在shell.c中可以看见关于上面打印出来的命令的定义,其实每个shell命令对应一个process,
5,添加自定义命令通过一下方式即可:
a,通过SHELL_COMMAND(blink_command, "blink",
"blink on/off : led on/off", &shell_blink_process);定义shell命令;
b,通过shell_register_command(&blink_command);在shell初始化的时候一并初始化即可
其他的内容,在后续的学习中将陆续记录。
ps.我还只是个初级入门的菜鸟,有些地方写的有问题也请大家指点啊。
贴上我的源码:(仅供参考)
点击打开链接
之前通过网上收集资料(资料后期整理之后会在博客分享),在stm32上面跑通了,就是实现了简单的点灯程序,以及串口输出。
但是后期开发使用肯定需要用到shell,经过一番折腾后小有收获。
在这说一下开发环境:IAR+stm32vet6(ST官方库3.5+contiki3.0)
二,准备工作
1,在contiki源码中按照目录提取以下文件:
ps. stm32_shell.c是自行添加的代码
三,源码分析
1,先看一下main函数:
int main()
{
dbg_setup_uart();
led_init();
printf("Initialising\r\n");
clock_init();
process_init();
//shell serial_line 初始化
uart1_set_input(serial_line_input_byte);
serial_line_init();
//
process_start(&etimer_process, NULL);
autostart_start(autostart_processes);
printf("Processes running\r\n");
while(1) {
do
{
}
while(process_run() > 0);
idle_count++;
/* Idle! */
/* Stop processor clock */
/* asm("wfi"::); */
}
return 0;
}需要注意的是:
//shell serial_line 初始化 uart1_set_input(serial_line_input_byte); serial_line_init(); //2,usrt1_set_input定义在串口底层驱动里面
static int (* uart1_input_handler)(unsigned char c);
void uart1_set_input(int (* input)(unsigned char c))
{
uart1_input_handler = input;
}先建立一个函数指针:static int (* uart1_input_handler)(unsigned char c);再通过
uart1_set_input(serial_line_input_byte);将(*uart1_input_handler)指向 serial_line_input_byte()函数,
这样就可以通过调用uart1_input_handler();将串口接到的数据导入serial_line中,从而可以通过serial_line_process进程进行命令分析做出相应处理。
uart1_input_handler();的调用写在串口中断中即可:
void USART1_IRQHandler(void)
{
ENERGEST_ON(ENERGEST_TYPE_IRQ);
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET)
{
if(uart1_input_handler != NULL)
{
/* Read one byte from the receive data register */
uint8_t buf = USART_ReceiveData(USART1);
uart1_input_handler(buf);
}
}
ENERGEST_OFF(ENERGEST_TYPE_IRQ);
}3,通过上面的处理已经把串口接收到的数据导入serial_line中了,当然串口配置初始化在这就不用多说了,
接下来就是要把shell进程加入系统了:
调用serial_shell_init()函数即可
定义:
void
serial_shell_init(void)
{
process_start(&serial_shell_process, NULL);
}就是开启serial_shell_process进程,但是我这边新建立一个进程,用于后续其他自定义的shell命令的初始化:#include "contiki.h"
#include "shell.h"
#include "serial-shell.h"
PROCESS(stm32_shell_process, "STM32 Contiki Shell");
PROCESS_THREAD(stm32_shell_process, ev, data)
{
PROCESS_BEGIN();
serial_shell_init();//初始化shell
PROCESS_END();
}然后再将改进程加入main函数即可,到这边就已经完成了shell的功能,可以通过串口看见
发送 help(加回车)
这是一些默认的命令,你也可以自己定义一些命令,通过阅读shell部分的源码进一步了解原理。
4,在shell.c中可以看见关于上面打印出来的命令的定义,其实每个shell命令对应一个process,
PROCESS(help_command_process, "help"); SHELL_COMMAND(help_command, "help", "help: shows this help", &help_command_process); SHELL_COMMAND(question_command, "?", "?: shows this help", &help_command_process); PROCESS(shell_killall_process, "killall"); SHELL_COMMAND(killall_command, "killall", "killall: stop all running commands", &shell_killall_process); PROCESS(shell_kill_process, "kill"); SHELL_COMMAND(kill_command, "kill", "kill <command>: stop a specific command", &shell_kill_process); PROCESS(shell_null_process, "null"); SHELL_COMMAND(null_command, "null", "null: discard input", &shell_null_process); PROCESS(shell_exit_process, "exit"); SHELL_COMMAND(exit_command, "exit", "exit: exit shell", &shell_exit_process); SHELL_COMMAND(quit_command, "quit", "quit: exit shell", &shell_exit_process);
PROCESS_THREAD(shell_kill_process, ev, data)
{
struct shell_command *c;
char *name;
PROCESS_BEGIN();
name = data;
if(name == NULL || strlen(name) == 0) {
shell_output_str(&kill_command,
"kill <command>: command name must be given", "");
}
for(c = list_head(commands);
c != NULL;
c = c->next) {
if(strcmp(name, c->command) == 0 &&
c != &kill_command &&
process_is_running(c->process)) {
command_kill(c);
PROCESS_EXIT();
}
}
shell_output_str(&kill_command, "Command not found: ", name);
PROCESS_END();
}5,添加自定义命令通过一下方式即可:
#include "contiki.h"
#include "shell.h"
#include "stdio.h"
#include "string.h"
#include "stm32f10x.h"
PROCESS(shell_blink_process, "shell blink");
SHELL_COMMAND(blink_command, "blink",
"blink on/off : led on/off", &shell_blink_process);
static void
led_init()
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOF,ENABLE);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7;
GPIO_Init(GPIOF, &GPIO_InitStructure);
}
/**
* \brief
* \param
*
*/
static void
led_on()
{
GPIO_SetBits(GPIOF, GPIO_Pin_7);
}
static void
led_off()
{
GPIO_ResetBits(GPIOF, GPIO_Pin_7);
}
PROCESS_THREAD(shell_blink_process, ev, data)
{
PROCESS_BEGIN();
if(data != NULL)
{
if(strcmp(data, "on"))
{
led_on();
}
else if(strcmp(data, "off"))
{
led_off();
}
else
{
printf("Invalid param!\n");
}
}
PROCESS_END();
}
void
shell_blink_init(void)
{
led_init();
shell_register_command(&blink_command);
}a,通过SHELL_COMMAND(blink_command, "blink",
"blink on/off : led on/off", &shell_blink_process);定义shell命令;
b,通过shell_register_command(&blink_command);在shell初始化的时候一并初始化即可
其他的内容,在后续的学习中将陆续记录。
ps.我还只是个初级入门的菜鸟,有些地方写的有问题也请大家指点啊。
贴上我的源码:(仅供参考)
点击打开链接

相关文章推荐
- UNIX环境高级编程学习之第六章系统数据文件和信息-修改第四章实现的Shell的“ls -l”功能
- 7、contiki系统开发-通过边界路由器PING终端设备的节点-学习(在OpenWrt上实现6lowpan边缘路由器)
- 模块管理常规功能自定义系统的设计与实现(01--系统简介)
- Linux学习-->如何通过Shell脚本实现发送邮件通知功能?
- STM32实现IAP功能的学习笔记
- ExtJs学习篇---OA系统登录界面设计之登录功能实现
- STM32学习笔记:单片机按键单击、双击、长按功能实现
- sql server 关于表中只增标识问题 C# 实现自动化打开和关闭可执行文件(或 关闭停止与系统交互的可执行文件) ajaxfileupload插件上传图片功能,用MVC和aspx做后台各写了一个案例 将小写阿拉伯数字转换成大写的汉字, C# WinForm 中英文实现, 国际化实现的简单方法 ASP.NET Core 2 学习笔记(六)ASP.NET Core 2 学习笔记(三)
- Android学习之调用系统相机实现拍照功能
- STM32 IAP功能实现学习笔记 ---详细说明
- 使用shell和python分别实现简单菜单功能--打印当前系统状态信息
- 【Unity快速实现小功能】动画系统学习小技巧篇(二)——摄像机跟随角色移动
- Android学习之调用系统相机实现拍照功能
- Linux学习-->如何通过Shell脚本实现发送邮件通知功能?
- 01-php项目之雇员管理系统1-实现登录功能
- 菜鸟学习c++—实现系统权限管理功能(类的public和private应用)
- 从0开始学习contiki之01搭建编译环境实现hello world
- STM32实现IAP功能的学习笔记
- STM32学习笔记:单片机按键单击、双击、长按功能实现
- unity3D学习【功能实现】之十一:通过Json读取地图01