V-rep学习笔记:Reflexxes Motion Library 1
2017-01-24 13:46
495 查看
V-REP中集成了在线运动轨迹生成库Reflexxes Motion Library Type IV,目前Reflexxes公司已经被谷歌收购。(The Reflexxes Motion Libraries provide instantaneous trajectory generation capabilities for motion control systems. Reflexxes Motion Library contains a set of On-Line Trajectory Generation (OTG) algorithms that are designed to control robots and mechanical systems.) Reflexxes的众多优点使其可以应用于机器人、数控机床和伺服驱动系统等领域。
View Code
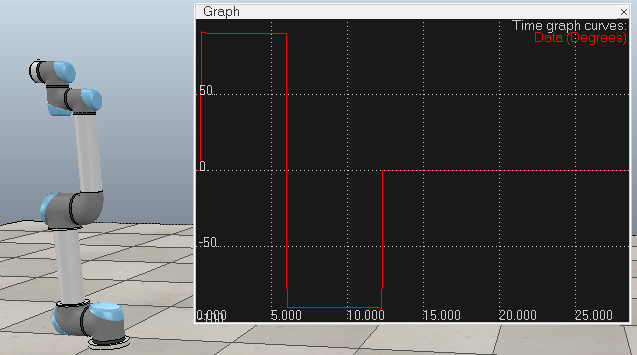
添加一个Graph记录基座转动关节的角位移,可以看出确实符合程序中的设置:0°→90°→-90°→0°
参考:
Reflexxes Motion Libraries Manual and Documentation
V-REP: Reflexxes Motion Library Demonstration
-- This is a threaded script, and is just an example!
jointHandles={-1,-1,-1,-1,-1,-1}
for i=1,6,1 do
jointHandles[i]=simGetObjectHandle('UR5_joint'..i)
end
-- Set-up some of the RML vectors:
vel=180
accel=40
jerk=80
currentVel={0,0,0,0,0,0,0}
currentAccel={0,0,0,0,0,0,0}
maxVel={vel*math.pi/180,vel*math.pi/180,vel*math.pi/180,vel*math.pi/180,vel*math.pi/180,vel*math.pi/180}
maxAccel={accel*math.pi/180,accel*math.pi/180,accel*math.pi/180,accel*math.pi/180,accel*math.pi/180,accel*math.pi/180}
maxJerk={jerk*math.pi/180,jerk*math.pi/180,jerk*math.pi/180,jerk*math.pi/180,jerk*math.pi/180,jerk*math.pi/180}
targetVel={0,0,0,0,0,0}
targetPos1={90*math.pi/180,90*math.pi/180,-90*math.pi/180,90*math.pi/180,90*math.pi/180,90*math.pi/180}
-- simRMLMoveToJointPositions: Moves (actuates) several joints at the same time using the Reflexxes Motion Library.
-- This function can only be called from child scripts running in a thread
--[[
number result,table newPos,table newVel,table newAccel,number timeLeft=simRMLMoveToJointPositions(table jointHandles,
number flags,table currentVel,table currentAccel,table maxVel,
table maxAccel,table maxJerk,table targetPos,table targetVel,table direction)
--]]
simRMLMoveToJointPositions(jointHandles,-1,currentVel,currentAccel,maxVel,maxAccel,maxJerk,targetPos1,targetVel)
targetPos2={-90*math.pi/180,45*math.pi/180,90*math.pi/180,135*math.pi/180,90*math.pi/180,90*math.pi/180}
simRMLMoveToJointPositions(jointHandles,-1,currentVel,currentAccel,maxVel,maxAccel,maxJerk,targetPos2,targetVel)
targetPos3={0,0,0,0,0,0}
simRMLMoveToJointPositions(jointHandles,-1,currentVel,currentAccel,maxVel,maxAccel,maxJerk,targetPos3,targetVel)View Code
添加一个Graph记录基座转动关节的角位移,可以看出确实符合程序中的设置:0°→90°→-90°→0°
参考:
Reflexxes Motion Libraries Manual and Documentation
V-REP: Reflexxes Motion Library Demonstration

相关文章推荐
- V-rep学习笔记:Reflexxes Motion Library 2
- V-rep学习笔记:Reflexxes Motion Library 3
- Asp.Net Ajax 学习笔记12 基于Microsoft AJAX Library扩展客户端组件
- 动态链接库(Dynamic Link Library)学习笔记
- The C++ Standard Library 学习笔记(一)第5章
- Boost Graph Library 学习笔记
- Asp.Net Ajax 学习笔记13 Microsoft AJAX Library中异步通信层(摘自网络)
- The C++ Standard Library 学习笔记(一)第7章
- 学习笔记 Real COM with the MFC Library (译一)
- The C++ Standard Library 学习笔记(一)1 - 4 章
- (转载)动态链接库(Dynamic Link Library)学习笔记
- Enterprise Library Exception Handling Application Block 学习笔记 - 1
- Asp.Net Ajax 学习笔记11 Microsoft AJAX Library中的面向对象类型系统
- Asp.Net Ajax 学习笔记14 扩展Microsoft AJAX Library的异步通信层
- Asp.Net Ajax 学习笔记13 Microsoft AJAX Library中异步通信层使用
- Enterprise Library Exception Handling Application Block 学习笔记 - 2
- Asp.Net Ajax 学习笔记9 JavaScript的原生类型以及Microsoft AJAX Library的相关扩展(上)
- Asp.Net Ajax 学习笔记22 使用Microsoft Ajax Library中的浏览器兼容功能
- 学习笔记 Real COM with the MFC Library (译四)
- Enterprice library学习笔记之一:【初探】缓存应用模块