几种典型的立体匹配算法
2016-12-10 23:30
471 查看
使用左右两张图片,计算深度图。一下几种算法代码参考
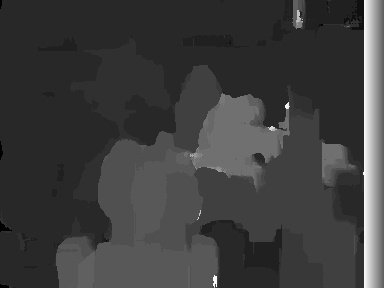
http://www.360doc.com/content/13/0129/11/11533449_263014896.shtml,经验证可行。并得到一下的深度图,貌似DP算法比较快并且效果还蛮好的。
SAD算法
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
[/code]

SSD算法:
ZSSD算法:
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
[/code]

census 算法:
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
[/code]

NCC算法:
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
[/code]

DP算法:
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
[/code]

DP_5算法:
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
[/code]
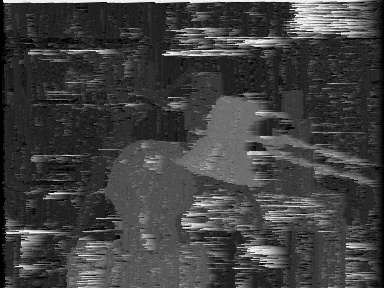
http://www.360doc.com/content/13/0129/11/11533449_263014896.shtml,经验证可行。并得到一下的深度图,貌似DP算法比较快并且效果还蛮好的。
SAD算法
#include<iostream>
#include<cv.h>
#include<highgui.h>
using namespace std;
int GetHammingWeight(unsigned int value);
int main(){
/*Half of the window size for the census transform*/
int hWin = 11;
int compareLength = (2*hWin+1)*(2*hWin+1);
cout<<"hWin: "<<hWin<<"; "<<"compare length: "<<compareLength<<endl;
cout<<"SAD test"<<endl;
// char stopKey;
IplImage * leftImage = cvLoadImage("left.bmp",0);
IplImage * rightImage = cvLoadImage("right.bmp",0);
int imageWidth = leftImage->width;
int imageHeight =leftImage->height;
IplImage * SADImage = cvCreateImage(cvGetSize(leftImage),leftImage->depth,1);
IplImage * MatchLevelImage = cvCreateImage(cvGetSize(leftImage),leftImage->depth,1);
int minDBounds = 0;
int maxDBounds = 31;
cvNamedWindow("Left",1);
cvNamedWindow("Right",1);
cvNamedWindow("Census",1);
cvNamedWindow("MatchLevel",1);
cvShowImage("Left",leftImage);
cvShowImage("Right",rightImage);
/*Census Transform */
int i,j ,m,n,k;
unsigned char centerPixel = 0;
unsigned char neighborPixel = 0;
int bitCount = 0;
unsigned int bigger = 0;
int sum = 0;
unsigned int *matchLevel = new unsigned int[maxDBounds - minDBounds + 1];
int tempMin = 0;
int tempIndex = 0;
unsigned char* dst;
unsigned char* leftSrc = NULL;
unsigned char* rightSrc = NULL;
unsigned char leftPixel = 0;
unsigned char rightPixel =0;
unsigned char subPixel = 0;
for(i = 0 ; i < leftImage->height;i++){
for(j = 0; j< leftImage->width;j++){
for (k = minDBounds;k <= maxDBounds;k++)
{
sum = 0;
for (m = i-hWin; m <= i + hWin;m++)
{
for (n = j - hWin; n <= j + hWin;n++)
{
if (m < 0 || m >= imageHeight || n <0 || n >= imageWidth )
{
subPixel = 0;
}else if (n + k >= imageWidth)
{
subPixel = 0;
}else
{
leftSrc = (unsigned char*)leftImage->imageData
+ m*leftImage->widthStep + n + k;
rightSrc = (unsigned char*)rightImage->imageData
+ m*rightImage->widthStep + n;
leftPixel = *leftSrc;
rightPixel = *rightSrc;
if (leftPixel > rightPixel)
{
subPixel = leftPixel - rightPixel;
}else
{
subPixel = rightPixel -leftPixel;
}
}
sum += subPixel;
}
}
matchLevel[k] = sum;
//cout<<sum<<endl;
}
/*寻找最佳匹配点*/
// matchLevel[0] = 1000000;
tempMin = 0;
tempIndex = 0;
for ( m = 1;m < maxDBounds - minDBounds + 1;m++)
{
//cout<<matchLevel[m]<<endl;
if (matchLevel[m] < matchLevel[tempIndex])
{
tempMin = matchLevel[m];
tempIndex = m;
}
}
dst = (unsigned char *)SADImage->imageData + i*SADImage->widthStep + j;
//cout<<"index: "<<tempIndex<<" ";
*dst = tempIndex*8;
dst = (unsigned char *)MatchLevelImage->imageData + i*MatchLevelImage->widthStep + j;
*dst = tempMin;
//cout<<"min: "<<tempMin<<" ";
//cout<< tempIndex<<" " <<tempMin<<endl;
}
//cvWaitKey(0);
}
cvShowImage("Census",SADImage);
cvShowImage("MatchLevel",MatchLevelImage);
cvSaveImage("depth.jpg",SADImage);
cvSaveImage("matchLevel.jpg",MatchLevelImage);
cvWaitKey(0);
cvDestroyAllWindows();
cvReleaseImage(&leftImage);
cvReleaseImage(&rightImage);
return 0;
}12
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
[/code]
SSD算法:
#include<iostream>
#include<cv.h>
#include<highgui.h>
using namespace std;
int GetHammingWeight(unsigned int value);
int main(){
/*Half of the window size for the census transform*/
int hWin = 11;
int compareLength = (2*hWin+1)*(2*hWin+1);
cout<<"hWin: "<<hWin<<"; "<<"compare length: "<<compareLength<<endl;
cout<<"SAD test"<<endl;
// char stopKey;
IplImage * leftImage = cvLoadImage("l2.jpg",0);
IplImage * rightImage = cvLoadImage("r2.jpg",0);
int imageWidth = leftImage->width;
int imageHeight =leftImage->height;
IplImage * SADImage = cvCreateImage(cvGetSize(leftImage),leftImage->depth,1);
IplImage * MatchLevelImage = cvCreateImage(cvGetSize(leftImage),leftImage->depth,1);
int minDBounds = 0;
int maxDBounds = 31;
cvNamedWindow("Left",1);
cvNamedWindow("Right",1);
cvNamedWindow("Census",1);
cvNamedWindow("MatchLevel",1);
cvShowImage("Left",leftImage);
cvShowImage("Right",rightImage);
/*Census Transform */
int i,j ,m,n,k;
unsigned char centerPixel = 0;
unsigned char neighborPixel = 0;
int bitCount = 0;
unsigned int bigger = 0;
int sum = 0;
unsigned int *matchLevel = new unsigned int[maxDBounds - minDBounds + 1];
int tempMin = 0;
int tempIndex = 0;
unsigned char* dst;
unsigned char* leftSrc = NULL;
unsigned char* rightSrc = NULL;
unsigned char leftPixel = 0;
unsigned char rightPixel =0;
unsigned char subPixel = 0;
for(i = 0 ; i < leftImage->height;i++){
for(j = 0; j< leftImage->width;j++){
for (k = minDBounds;k <= maxDBounds;k++)
{
sum = 0;
for (m = i-hWin; m <= i + hWin;m++)
{
for (n = j - hWin; n <= j + hWin;n++)
{
if (m < 0 || m >= imageHeight || n <0 || n >= imageWidth )
{
subPixel = 0;
}else if (n + k >= imageWidth)
{
subPixel = 0;
}else
{
leftSrc = (unsigned char*)leftImage->imageData
+ m*leftImage->widthStep + n + k;
rightSrc = (unsigned char*)rightImage->imageData
+ m*rightImage->widthStep + n;
leftPixel = *leftSrc;
rightPixel = *rightSrc;
if (leftPixel > rightPixel)
{
subPixel = leftPixel - rightPixel;
}else
{
subPixel = rightPixel -leftPixel;
}
}
sum += subPixel*subPixel;
}
}
matchLevel[k] = sum;
//cout<<sum<<endl;
}
/*寻找最佳匹配点*/
// matchLevel[0] = 1000000;
tempMin = 0;
tempIndex = 0;
for ( m = 1;m < maxDBounds - minDBounds + 1;m++)
{
//cout<<matchLevel[m]<<endl;
if (matchLevel[m] < matchLevel[tempIndex])
{
tempMin = matchLevel[m];
tempIndex = m;
}
}
dst = (unsigned char *)SADImage->imageData + i*SADImage->widthStep + j;
//cout<<"index: "<<tempIndex<<" ";
*dst = tempIndex*8;
dst = (unsigned char *)MatchLevelImage->imageData + i*MatchLevelImage->widthStep + j;
*dst = tempMin;
//cout<<"min: "<<tempMin<<" ";
//cout<< tempIndex<<" " <<tempMin<<endl;
}
//cvWaitKey(0);
}
cvShowImage("Census",SADImage);
cvShowImage("MatchLevel",MatchLevelImage);
cvSaveImage("depth.jpg",SADImage);
cvSaveImage("matchLevel.jpg",MatchLevelImage);
cvWaitKey(0);
cvDestroyAllWindows();
cvReleaseImage(&leftImage);
cvReleaseImage(&rightImage);
return 0;
}ZSSD算法:
#include<iostream>
#include<cv.h>
#include<highgui.h>
using namespace std;
int GetHammingWeight(unsigned int value);
int main(){
/*Half of the window size for the census transform*/
int hWin = 11;
int compareLength = (2*hWin+1)*(2*hWin+1);
cout<<"hWin: "<<hWin<<"; "<<"compare length: "<<compareLength<<endl;
cout<<"ZSSD test"<<endl;
// char stopKey;
/* IplImage * leftImage = cvLoadImage("l2.jpg",0);
IplImage * rightImage = cvLoadImage("r2.jpg",0);*/
IplImage * leftImage = cvLoadImage("left.bmp",0);
IplImage * rightImage = cvLoadImage("right.bmp",0);
int imageWidth = leftImage->width;
int imageHeight =leftImage->height;
IplImage * SADImage = cvCreateImage(cvGetSize(leftImage),leftImage->depth,1);
IplImage * MatchLevelImage = cvCreateImage(cvGetSize(leftImage),leftImage->depth,1);
int minDBounds = 0;
int maxDBounds = 31;
cvNamedWindow("Left",1);
cvNamedWindow("Right",1);
cvNamedWindow("Census",1);
cvNamedWindow("MatchLevel",1);
cvShowImage("Left",leftImage);
cvShowImage("Right",rightImage);
/*Census Transform */
int i,j ,m,n,k;
unsigned char centerPixel = 0;
unsigned char neighborPixel = 0;
int bitCount = 0;
unsigned int bigger = 0;
int sumLeft = 0;
int sumRight = 0;
int sum =0;
int zSumLeft = 0;
int zSumRight = 0;
unsigned int *matchLevel = new unsigned int[maxDBounds - minDBounds + 1];
int tempMin = 0;
int tempIndex = 0;
unsigned char* dst;
unsigned char* leftSrc = NULL;
unsigned char* rightSrc = NULL;
unsigned char leftPixel = 0;
unsigned char rightPixel =0;
unsigned char subPixel = 0;
unsigned char meanLeftPixel = 0;
unsigned char meanRightPixel = 0;
for(i = 0 ; i < leftImage->height;i++){
for(j = 0; j< leftImage->width;j++){
/*均值计算 */
for (k = minDBounds;k <= maxDBounds;k++)
{
sumLeft = 0;
sumRight = 0;
for (m = i-hWin; m <= i + hWin;m++)
{
for (n = j - hWin; n <= j + hWin;n++)
{
if (m < 0 || m >= imageHeight || n <0 || n >= imageWidth )
{
sumLeft += 0;
}else {
leftSrc = (unsigned char*)leftImage->imageData
+ m*leftImage->widthStep + n + k;
leftPixel = *leftSrc;
sumLeft += leftPixel;
}
if (m < 0 || m >= imageHeight || n + k <0 || n +k >= imageWidth)
{
sumRight += 0;
}else
{
rightSrc = (unsigned char*)rightImage->imageData
+ m*rightImage->widthStep + n;
rightPixel = *rightSrc;
sumRight += rightPixel;
}
}
}
meanLeftPixel = sumLeft/compareLength;
meanRightPixel = sumRight/compareLength;
/*ZSSD*/
sum = 0;
for (m = i-hWin; m <= i + hWin;m++)
{
for (n = j - hWin; n <= j + hWin;n++)
{
if (m < 0 || m >= imageHeight || n <0 || n >= imageWidth )
{
//zSumLeft += 0;
leftPixel = 0;
}else {
leftSrc = (unsigned char*)leftImage->imageData
+ m*leftImage->widthStep + n + k;
leftPixel = *leftSrc;
//zSumLeft += (leftPixel - meanLeftPixel)*(leftPixel -meanLeftPixel);
}
if (m < 0 || m >= imageHeight || n + k <0 || n +k >= imageWidth)
{
//zSumRight += 0;
rightPixel = 0;
}else
{
rightSrc = (unsigned char*)rightImage->imageData
+ m*rightImage->widthStep + n;
rightPixel = *rightSrc;
// zSumRight += (rightPixel - meanRightPixel)*(rightPixel - meanRightPixel);
}
sum += ((rightPixel - meanRightPixel)-(leftPixel -meanLeftPixel))
*((rightPixel - meanRightPixel)-(leftPixel -meanLeftPixel));
}
}
matchLevel[k] = sum;
//cout<<sum<<endl;
}
/*寻找最佳匹配点*/
// matchLevel[0] = 1000000;
tempMin = 0;
tempIndex = 0;
for ( m = 1;m < maxDBounds - minDBounds + 1;m++)
{
//cout<<matchLevel[m]<<endl;
if (matchLevel[m] < matchLevel[tempIndex])
{
tempMin = matchLevel[m];
tempIndex = m;
}
}
dst = (unsigned char *)SADImage->imageData + i*SADImage->widthStep + j;
//cout<<"index: "<<tempIndex<<" ";
*dst = tempIndex*8;
dst = (unsigned char *)MatchLevelImage->imageData + i*MatchLevelImage->widthStep + j;
*dst = tempMin;
//cout<<"min: "<<tempMin<<" ";
//cout<< tempIndex<<" " <<tempMin<<endl;
}
// cvWaitKey(0);
}
cvShowImage("Census",SADImage);
cvShowImage("MatchLevel",MatchLevelImage);
cvSaveImage("depth.jpg",SADImage);
cvSaveImage("matchLevel.jpg",MatchLevelImage);
cout<<endl<<"Over"<<endl;
cvWaitKey(0);
cvDestroyAllWindows();
cvReleaseImage(&leftImage);
cvReleaseImage(&rightImage);
return 0;
}12
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
[/code]
census 算法:
#include<iostream>
#include<cv.h>
#include<highgui.h>
using namespace std;
int GetHammingWeight(unsigned int value);
int main(){
/*Half of the window size for the census transform*/
int hWin = 11;
int bitlength = 0;
if ((2*hWin+1)*(2*hWin+1)%32 == 0)
{
bitlength = (2*hWin+1)*(2*hWin+1)/32;
}else {
bitlength = (2*hWin+1)*(2*hWin+1)/32 + 1;
}
cout<<"hWin: "<<hWin<<"; "<<"bit length: "<<bitlength<<endl;
cout<<"Census test"<<endl;
// char stopKey;
IplImage * leftImage = cvLoadImage("left.bmp",0);
IplImage * rightImage = cvLoadImage("right.bmp",0);
int imageWidth = leftImage->width;
int imageHeight =leftImage->height;
IplImage * CensusImage = cvCreateImage(cvGetSize(leftImage),leftImage->depth,1);
IplImage * MatchLevelImage = cvCreateImage(cvGetSize(leftImage),leftImage->depth,1);
int minDBounds = 0;
int maxDBounds = 31;
// int leftCensus[imageHeight][imageWidth][bitlength] = {0};
unsigned int *leftCensus = new unsigned int[imageHeight*imageWidth*bitlength];
unsigned int *rightCensus = new unsigned int[imageHeight*imageWidth*bitlength];
for (int i = 0;i < imageHeight*imageWidth*bitlength;i++)
{
leftCensus[i] = 0;
rightCensus[i] = 0;
}
int pointCnt = 0;
cvNamedWindow("Left",1);
cvNamedWindow("Right",1);
cvNamedWindow("Census",1);
cvNamedWindow("MatchLevel",1);
cvShowImage("Left",leftImage);
cvShowImage("Right",rightImage);
/*Census Transform */
int i,j ,m,n,k,l;
unsigned char centerPixel = 0;
unsigned char neighborPixel = 0;
int bitCount = 0;
unsigned int bigger = 0;
for(i = 0 ; i < leftImage->height;i++){
for(j = 0; j< leftImage->width;j++){
centerPixel = *((unsigned char *)leftImage->imageData + i*leftImage->widthStep + j);
bitCount = 0;
for (m = i - hWin; m <= i + hWin;m++)
{
for (n = j - hWin; n<= j+hWin;n++)
{
bitCount++;
if (m < 0 || m >= leftImage->height || n < 0 || n >= leftImage->width)
{
neighborPixel = 0;
}else{
neighborPixel = *((unsigned char *)leftImage->imageData + m*leftImage->widthStep + n);
}
bigger = (neighborPixel > centerPixel)?1:0;
leftCensus[(i*imageWidth + j)*bitlength + bitCount/32] |= (bigger<<(bitCount%32));
}
}
}
}
for(i = 0 ; i < rightImage->height;i++){
for(j = 0; j< rightImage->width;j++){
centerPixel = *((unsigned char *)rightImage->imageData + i*rightImage->widthStep + j);
bitCount = 0;
for (m = i - hWin; m <= i + hWin;m++)
{
for (n = j - hWin; n<= j+hWin;n++)
{
bitCount++;
if (m < 0 || m >= rightImage->height || n < 0 || n >= rightImage->width)
{
neighborPixel = 0;
}else{
neighborPixel = *((unsigned char *)rightImage->imageData + m*rightImage->widthStep + n);
}
bigger = (neighborPixel > centerPixel)?1:0;
rightCensus[(i*imageWidth + j)*bitlength + bitCount/32] |= (bigger<<(bitCount%32));
}
}
}
}
int sum = 0;
unsigned int *matchLevel = new unsigned int[maxDBounds - minDBounds + 1];
int tempMin = 0;
int tempIndex = 0;
unsigned char *dst;
unsigned char pixle = 0;
for(i = 0 ; i < rightImage->height;i++){
for(j = 0; j< rightImage->width;j++){
for (k = minDBounds;k <= maxDBounds;k++)
{
sum = 0;
for (l = 0;l< bitlength;l++)
{
if (((i*imageWidth+j+k)*bitlength + l) < imageHeight*imageWidth*bitlength)
{
sum += GetHammingWeight(rightCensus[(i*imageWidth+j)*bitlength + l]
^ leftCensus[(i*imageWidth+j+k)*bitlength + l]);
}else {
//sum += 0;
// cout<<".";
}
}
matchLevel[k] = sum;
}
/*寻找最佳匹配点*/
tempMin = 0;
tempIndex = 0;
for ( m = 1;m < maxDBounds - minDBounds + 1;m++)
{
if (matchLevel[m] < matchLevel[tempIndex])
{
tempMin = matchLevel[m];
tempIndex = m;
}
}
if (tempMin > (2*hWin+1)*(2*hWin+1)*0.2)
{
tempMin = 0;
pointCnt++;
}else{
tempMin = 255;
}
dst = (unsigned char *)CensusImage->imageData + i*CensusImage->widthStep + j;
*dst = tempIndex*8;
dst = (unsigned char *)MatchLevelImage->imageData + i*MatchLevelImage->widthStep + j;
*dst = tempMin;
//cout<< tempIndex<<" " <<tempMin<<endl;;
}
}
cout<<"pointCnt: "<<pointCnt<<endl;
cvShowImage("Census",CensusImage);
cvShowImage("MatchLevel",MatchLevelImage);
cvSaveImage("depth.jpg",CensusImage);
cvSaveImage("matchLevel.jpg",MatchLevelImage);
cvWaitKey(0);
cvDestroyAllWindows();
cvReleaseImage(&leftImage);
cvReleaseImage(&rightImage);
return 0;
}
int GetHammingWeight(unsigned int value)
{
if(value == 0) return 0;
int a = value;
int b = value -1;
int c = 0;
int count = 1;
while(c = a & b)
{
count++;
a = c;
b = c-1;
}
return count;
}12
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
[/code]
NCC算法:
#include<iostream>
#include<cv.h>
#include<highgui.h>
#include <cmath>
using namespace std;
int main(){
/*Half of the window size for the census transform*/
int hWin = 11;
int compareLength = (2*hWin+1)*(2*hWin+1);
cout<<"hWin: "<<hWin<<"; "<<"compare length: "<<compareLength<<endl;
cout<<"NCC test"<<endl;
/* IplImage * leftImage = cvLoadImage("l2.jpg",0);
IplImage * rightImage = cvLoadImage("r2.jpg",0);*/
IplImage * leftImage = cvLoadImage("left.bmp",0);
IplImage * rightImage = cvLoadImage("right.bmp",0);
int imageWidth = leftImage->width;
int imageHeight =leftImage->height;
IplImage * NCCImage = cvCreateImage(cvGetSize(leftImage),leftImage->depth,1);
IplImage * MatchLevelImage = cvCreateImage(cvGetSize(leftImage),leftImage->depth,1);
int minDBounds = 0;
int maxDBounds = 31;
cvNamedWindow("Left",1);
cvNamedWindow("Right",1);
cvNamedWindow("Census",1);
cvNamedWindow("MatchLevel",1);
cvShowImage("Left",leftImage);
cvShowImage("Right",rightImage);
/*Census Transform */
int i,j ,m,n,k;
unsigned char centerPixel = 0;
unsigned char neighborPixel = 0;
int bitCount = 0;
unsigned int bigger = 0;
unsigned int sum =0;
unsigned int leftSquareSum = 0;
unsigned int rightSquareSum = 0;
double *matchLevel = new double[maxDBounds - minDBounds + 1];
double tempMax = 0;
int tempIndex = 0;
unsigned char* dst;
unsigned char* leftSrc = NULL;
unsigned char* rightSrc = NULL;
unsigned char leftPixel = 0;
unsigned char rightPixel =0;
unsigned char subPixel = 0;
unsigned char meanLeftPixel = 0;
unsigned char meanRightPixel = 0;
for(i = 0 ; i < leftImage->height;i++){
for(j = 0; j< leftImage->width;j++){
/*均值计算 */
for (k = minDBounds;k <= maxDBounds;k++)
{
sum = 0;
leftSquareSum = 0;
rightSquareSum = 0;
for (m = i-hWin; m <= i + hWin;m++)
{
for (n = j - hWin; n <= j + hWin;n++)
{
if (m < 0 || m >= imageHeight || n <0 || n >= imageWidth )
{
leftPixel = 0;
}else {
leftSrc = (unsigned char*)leftImage->imageData
+ m*leftImage->widthStep + n + k;
leftPixel = *leftSrc;
}
if (m < 0 || m >= imageHeight || n + k <0 || n +k >= imageWidth)
{
rightPixel = 0;
}else
{
rightSrc = (unsigned char*)rightImage->imageData
+ m*rightImage->widthStep + n;
rightPixel = *rightSrc;
}
sum += leftPixel*rightPixel;
leftSquareSum += leftPixel*leftPixel;
rightSquareSum += rightPixel*rightPixel;
}
}
matchLevel[k] = (double)sum/(sqrt(double(leftSquareSum))*sqrt((double)rightSquareSum));
}
tempMax = 0;
tempIndex = 0;
for ( m = 1;m < maxDBounds - minDBounds + 1;m++)
{
if (matchLevel[m] > matchLevel[tempIndex])
{
tempMax = matchLevel[m];
tempIndex = m;
}
}
dst = (unsigned char *)NCCImage->imageData + i*NCCImage->widthStep + j;
*dst = tempIndex*8;
dst = (unsigned char *)MatchLevelImage->imageData + i*MatchLevelImage->widthStep + j;
*dst = (unsigned char)(tempMax*255);
}
}
cvShowImage("Census",NCCImage);
cvShowImage("MatchLevel",MatchLevelImage);
cvSaveImage("depth.jpg",NCCImage);
cvSaveImage("matchLevel.jpg",MatchLevelImage);
cout<<endl<<"Over"<<endl;
cvWaitKey(0);
cvDestroyAllWindows();
cvReleaseImage(&leftImage);
cvReleaseImage(&rightImage);
return 0;
}12
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
[/code]
DP算法:
#include <cstdio>
#include <cstring>
#include <iostream>
#include<cv.h>
#include<highgui.h>
#include <cmath>
using namespace std;
const int Width = 1024;
const int Height = 1024;
int Ddynamic[Width][Width];
int main()
{
/*Half of the window size for the census transform*/
int hWin = 11;
int compareLength = (2*hWin+1)*(2*hWin+1);
cout<<"hWin: "<<hWin<<"; "<<"compare length: "<<compareLength<<endl;
cout<<"belief propagation test"<<endl;
IplImage * leftImage = cvLoadImage("l2.jpg",0);
IplImage * rightImage = cvLoadImage("r2.jpg",0);
// IplImage * leftImage = cvLoadImage("left.bmp",0);
// IplImage * rightImage = cvLoadImage("right.bmp",0);
int imageWidth = leftImage->width;
int imageHeight =leftImage->height;
IplImage * DPImage = cvCreateImage(cvGetSize(leftImage),leftImage->depth,1);
//IplImage * MatchLevelImage = cvCreateImage(cvGetSize(leftImage),leftImage->depth,1);
unsigned char * pPixel = NULL;
unsigned char pixel;
for (int i = 0; i< imageHeight;i++)
{
for (int j =0; j < imageWidth;j++ )
{
pPixel = (unsigned char *)DPImage->imageData + i*DPImage->widthStep + j;
*pPixel = 0;
}
}
int minDBounds = 0;
int maxDBounds = 31;
cvNamedWindow("Left",1);
cvNamedWindow("Right",1);
cvNamedWindow("Depth",1);
cvNamedWindow("MatchLevel",1);
cvShowImage("Left",leftImage);
cvShowImage("Right",rightImage);
int minD = 0;
int maxD = 31;
//假设图像是经过矫正的,那么每次都只是需要搜搜同一行的内容
int max12Diff = 10;
for (int i = 0;i < imageWidth;i++)
{
Ddynamic[0][i] = 0;
Ddynamic[i][0] = 0;
}
unsigned char * pLeftPixel = NULL;
unsigned char * pRightPixel = NULL;
unsigned char leftPixel = 0;
unsigned char rightPixel =0;
int m,n,l;
for (int i = 0 ; i < imageHeight;i++)
{
for (int j = 0; j<imageWidth;j++)
{
for (int k = j + minD; k <= j + maxD;k++)
{
if (k <0 || k >= imageWidth)
{
}else {
pLeftPixel = (unsigned char*)leftImage->imageData + i*leftImage->widthStep + k;
pRightPixel= (unsigned char*)rightImage->imageData+i*rightImage->widthStep + j;
leftPixel = *pLeftPixel;
rightPixel = *pRightPixel;
if (abs(leftPixel - rightPixel) <= max12Diff)
{
Ddynamic[j + 1][k + 1] = Ddynamic[j][k] +1;
}else if (Ddynamic[j][k+1] > Ddynamic[j+1][k])
{
Ddynamic[j + 1][k + 1] = Ddynamic[j][k+1];
}else{
Ddynamic[j+1][k+1] = Ddynamic[j+1][k];
}
//cout<<Ddynamic[j +1][k+1]<<" ";
}
}
//cout<<"\n";
}
//逆向搜索,找出最佳路径
m = imageWidth;
n = imageWidth;
l = Ddynamic[imageWidth][imageWidth];
while( l>0 )
{
if (Ddynamic[m]
== Ddynamic[m-1]
)
m--;
else if (Ddynamic[m]
== Ddynamic[m][n-1])
n--;
else
{
//s[--l]=a[i-1];
pPixel = (unsigned char *)DPImage->imageData + i*DPImage->widthStep + m;
*pPixel = (n-m)*8;
l--;
m--;
n--;
}
}
//cvWaitKey(0);
}
cvShowImage("Depth",DPImage);
cvSaveImage("depth.jpg",DPImage);
cvWaitKey(0);
return 0;
}12
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
[/code]
DP_5算法:
//引入概率公式
//
#include <cstdio>
#include <cstring>
#include <iostream>
#include<cv.h>
#include<highgui.h>
#include <cmath>
using namespace std;
const int Width = 1024;
const int Height = 1024;
int Ddynamic[Width][Width];
//使用钟形曲线作为匹配概率,差值越小则匹配的概率越大,最终的要求是使匹配的概率最大,概率曲线使用matlab生成
int Probability[256] = {
255, 255, 254, 252, 250, 247, 244, 240, 235, 230, 225, 219, 213, 206, 200, 192, 185, 178, 170, 162,
155, 147, 139, 132, 124, 117, 110, 103, 96, 89, 83, 77, 71, 65, 60, 55, 50, 46, 42, 38, 35, 31, 28,
25, 23, 20, 18, 16, 14, 13, 11, 10, 9, 8, 7, 6, 5, 4, 4, 3, 3, 2, 2, 2, 2, 1, 1, 1, 1, 1, 1, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0
};
int main()
{
IplImage * leftImage = cvLoadImage("l2.jpg",0);
IplImage * rightImage = cvLoadImage("r2.jpg",0);
//IplImage * leftImage = cvLoadImage("left.bmp",0);
//IplImage * rightImage = cvLoadImage("right.bmp",0);
int imageWidth = leftImage->width;
int imageHeight =leftImage->height;
IplImage * DPImage = cvCreateImage(cvGetSize(leftImage),leftImage->depth,1);
IplImage * effectiveImage = cvCreateImage(cvGetSize(leftImage),leftImage->depth,1);
IplImage * FilterImage = cvCreateImage(cvGetSize(leftImage),leftImage->depth,1);
unsigned char * pPixel = NULL;
unsigned char pixel;
unsigned char * pPixel2 = NULL;
unsigned char pixel2;
for (int i = 0; i< imageHeight;i++)
{
for (int j =0; j < imageWidth;j++ )
{
pPixel = (unsigned char *)DPImage->imageData + i*DPImage->widthStep + j;
*pPixel = 0;
pPixel = (unsigned char *)effectiveImage->imageData + i*effectiveImage->widthStep + j;
*pPixel = 0;
}
}
cvNamedWindow("Left",1);
cvNamedWindow("Right",1);
cvNamedWindow("Depth",1);
cvNamedWindow("effectiveImage",1);
cvShowImage("Left",leftImage);
cvShowImage("Right",rightImage);
int minD = 0;
int maxD = 31;
//假设图像是经过矫正的,那么每次都只是需要搜搜同一行的内容
int max12Diff = 5;
for (int i = 0;i < imageWidth;i++)
{
Ddynamic[0][i] = 0;
Ddynamic[i][0] = 0;
}
unsigned char * pLeftPixel = NULL;
unsigned char * pRightPixel = NULL;
unsigned char leftPixel = 0;
unsigned char rightPixel =0;
int m,n,l;
int t1 = clock();
for (int i = 0 ; i < imageHeight;i++)
{
for (int j = 0; j<imageWidth;j++)
{
for (int k = j + minD; k <= j + maxD;k++)
{
if (k <0 || k >= imageWidth)
{
}else {
pLeftPixel = (unsigned char*)leftImage->imageData + i*leftImage->widthStep + k;
pRightPixel= (unsigned char*)rightImage->imageData+i*rightImage->widthStep + j;
leftPixel = *pLeftPixel;
rightPixel = *pRightPixel;
//之前概率最大的点加上当前的概率
Ddynamic[j + 1][k + 1] = max(Ddynamic[j][k],max(Ddynamic[j][k+1],Ddynamic[j+1][k]))
+ Probability[abs(leftPixel - rightPixel)];
/* if (abs(leftPixel - rightPixel) <= max12Diff)
{
Ddynamic[j + 1][k + 1] = Ddynamic[j][k] +1;
}else if (Ddynamic[j][k+1] > Ddynamic[j+1][k])
{
Ddynamic[j + 1][k + 1] = Ddynamic[j][k+1];
}else{
Ddynamic[j+1][k+1] = Ddynamic[j+1][k];
}*/
//cout<<Ddynamic[j +1][k+1]<<" ";
}
}
//cout<<"\n";
}
//逆向搜索,找出最佳路径
m = imageWidth;
n = imageWidth;
l = Ddynamic[imageWidth][imageWidth];
while( m >= 1 && n >= 1)
{
pPixel = (unsigned char *)DPImage->imageData + i*DPImage->widthStep + m;
*pPixel = (n-m)*8;
//标记有效匹配点
pPixel = (unsigned char *)effectiveImage->imageData + i*effectiveImage->widthStep + m;
*pPixel = 255;
if (Ddynamic[m-1]
>= Ddynamic[m][n -1] && Ddynamic[m-1]
>= Ddynamic[m-1][n -1])
m--;
else if (Ddynamic[m][n-1] >= Ddynamic[m-1]
&& Ddynamic[m][n -1] >= Ddynamic[m-1][n -1])
n--;
else
{
//s[--l]=a[i-1];
// l -= Ddynamic[m]
;
m--;
n--;
}
}
//cvWaitKey(0);
}
//refine the depth image 7*7中值滤波
//统计未能匹配点的个数
int count = 0;
for (int i = 0 ;i< imageHeight;i++)
{
for (int j= 0; j< imageWidth;j++)
{
pPixel = (unsigned char *)effectiveImage->imageData + i*effectiveImage->widthStep + j;
pixel = *pPixel;
if (pixel == 0)
{
count++;
}
}
}
int t2 = clock();
cout<<"dt: "<<t2-t1<<endl;
cout<<"Count: "<<count<<" "<<(double)count/(imageWidth*imageHeight)<<endl;
cvShowImage("Depth",DPImage);
cvShowImage("effectiveImage",effectiveImage);
// cvWaitKey(0);
FilterImage = cvCloneImage(DPImage);
//7*7中值滤波
int halfMedianWindowSize = 3;
int medianWindowSize = 2*halfMedianWindowSize + 1;
int medianArray[100] = {0};
count = 0;
int temp = 0;
int medianVal = 0;
for (int i = halfMedianWindowSize + 1 ;i< imageHeight - halfMedianWindowSize;i++)
{
for (int j = halfMedianWindowSize; j< imageWidth - halfMedianWindowSize;j++)
{
pPixel = (unsigned char *)effectiveImage->imageData + i*effectiveImage->widthStep + j;
pixel = *pPixel;
if (pixel == 0)
{
count = 0;
for (int m = i - halfMedianWindowSize ; m <= i + halfMedianWindowSize ;m++)
{
for (int n = j - halfMedianWindowSize; n <= j + halfMedianWindowSize ;n++)
{
pPixel2 = (unsigned char *)DPImage->imageData + m*DPImage->widthStep + n;
pixel2 = *pPixel2;
if (pixel2 != 0)
{
medianArray[count] = pixel2;
count++;
}
}
//排序
for (int k = 0; k< count;k++)
{
for (int l = k + 1; l< count;l++)
{
if (medianArray[l] < medianArray[l-1] )
{
temp = medianArray[l];
medianArray[l] = medianArray[l-1];
medianArray[l-1] = temp;
}
}
}
medianVal = medianArray[count/2];
pPixel = (unsigned char *)FilterImage->imageData + i*DPImage->widthStep + j;
*pPixel = medianVal;
}
}
}
}
cvShowImage("Depth",DPImage);
cvShowImage("effectiveImage",effectiveImage);
cvShowImage("Filter",FilterImage);
cvSaveImage("depth.jpg",DPImage);
cvSaveImage("effective.jpg",effectiveImage);
cvWaitKey(0);
return 0;
}12
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
[/code]

相关文章推荐
- 几种典型的立体匹配算法
- 几种典型的立体匹配算法
- 几种典型的立体匹配算法
- 【视觉-立体视觉】立体匹配几种算法性能比较
- 基于Opencv的几种立体匹配算法+ELAS
- OpenCV三种立体匹配求视差图算法总结
- POJ 1274 典型的最大匹配 匈牙利算法
- 立体匹配算法_自适应窗口_Cross Based Support Region
- 自适应权值的立体匹配算法——AdaptWeight
- SAD立体匹配算法在opencv中的实现
- (转)分布式系统几种典型一致性算法简述
- opencvSGBM半全局立体匹配算法的研究(1)
- 立体匹配算法之线性扫描思想
- OpenCV3.4两种立体匹配算法效果对比
- 模式匹配的几种算法(含KMP算法)
- 浅谈置信度传播算法(Belief-Propagation)在立体匹配中的应用~
- 立体匹配:自适应权重立体匹配算法.
- 几种典型算法的快速比较函数
- 基于最小生成树的实时立体匹配算法简介
- 几种典型的查找算法分析