目标检测+光流跟踪
2016-11-16 19:13
183 查看
最近学习了LK光流法,主要用于运动目标的跟踪,于是想着和之前codebook运动目标检测结合起来,实现先检测再跟踪。
下面介绍目标检测跟踪流程:
(1)使用codebook进行背景学习
(2)使用codebook不断进行运动目标检测
(3)若发现运动目标,则对运动目标所在区域进行跟踪
(4)若丢失目标,则重新使用codebook进行运动检测
下面介绍操作中的一些细节:
(1)codebook检测结果可能包含噪声,由于和后续跟踪息息相关,因此需要去除噪声,经实验结果,发现通过计算轮廓长度来去除噪声是比较有效的,当然假设是需要被检测的目标是有一定大小的。
(2)codebook检测出目标后,可以利用findcontour找到目标的轮廓信息,再利用boundingRect找到包含运动目标的最小长方形,这个长方形可以作为一个mask,用来输入goodFeaturesToTrack,即只在目标检测的区域寻找特征点或添加特征点,避免了无用特征点的使用。
(3)承接(2),当目标被检测到时,会计算出一个mask,但由于此时进入了跟踪程序,因此如果不更新mask的话,该区域永远对着初始区域,不能为后续视频帧寻找特征点做帮助。因此,我的做法是,计算特征点群的质心坐标,以此作为mask的中心位置,即mask的运动趋势与运动目标一致。当特征点数量不足时,会使用goodFeaturesToTrack进行补点操作,但若由于目标被全部遮挡导致此区域无特征点,则会再次进行codebook背景运动目标检测环节。
PS:
具体两部分实现可参考两位大牛: (1) codebook:http://blog.csdn.net/zcube/article/details/7353941
(2) LK光流:http://blog.csdn.net/yang_xian521/article/details/6987447
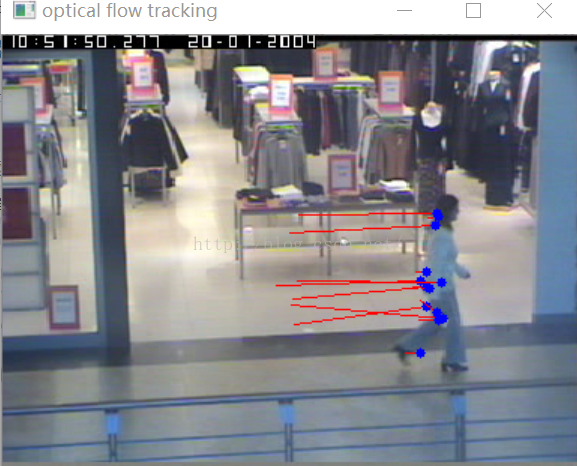
下面为实验结果:

下面介绍目标检测跟踪流程:
(1)使用codebook进行背景学习
(2)使用codebook不断进行运动目标检测
(3)若发现运动目标,则对运动目标所在区域进行跟踪
(4)若丢失目标,则重新使用codebook进行运动检测
下面介绍操作中的一些细节:
(1)codebook检测结果可能包含噪声,由于和后续跟踪息息相关,因此需要去除噪声,经实验结果,发现通过计算轮廓长度来去除噪声是比较有效的,当然假设是需要被检测的目标是有一定大小的。
(2)codebook检测出目标后,可以利用findcontour找到目标的轮廓信息,再利用boundingRect找到包含运动目标的最小长方形,这个长方形可以作为一个mask,用来输入goodFeaturesToTrack,即只在目标检测的区域寻找特征点或添加特征点,避免了无用特征点的使用。
(3)承接(2),当目标被检测到时,会计算出一个mask,但由于此时进入了跟踪程序,因此如果不更新mask的话,该区域永远对着初始区域,不能为后续视频帧寻找特征点做帮助。因此,我的做法是,计算特征点群的质心坐标,以此作为mask的中心位置,即mask的运动趋势与运动目标一致。当特征点数量不足时,会使用goodFeaturesToTrack进行补点操作,但若由于目标被全部遮挡导致此区域无特征点,则会再次进行codebook背景运动目标检测环节。
PS:
具体两部分实现可参考两位大牛: (1) codebook:http://blog.csdn.net/zcube/article/details/7353941
(2) LK光流:http://blog.csdn.net/yang_xian521/article/details/6987447
下面为实验结果:

相关文章推荐
- 基于光流分析的运动目标快速检测与跟踪融合算法
- 运动目标检测、阴影检测及目标跟踪中用得到的标准测试视频下载(大量IBM提供视频)
- 运动目标检测、阴影检测及目标跟踪中用得到的标准测试视频下载(大量IBM提供视频)
- 运动目标检测、阴影检测及目标跟踪中用得到的标准测试视频下载
- 运动目标检测和跟踪
- TLD运动检测与目标跟踪详细介绍
- 图像目标检测与跟踪学习笔记(二)
- 总结一下目标检测与跟踪
- 关于目标检测和跟踪的一些看法
- 运动目标检测、阴影检测及目标跟踪中用得到的标准测试视频下载
- 运动目标检测跟踪各过程算法综述
- 图像目标检测与跟踪学习笔记(四)
- 运动目标检测与跟踪
- OpenCV学习笔记(二十六)——小试SVM算法ml OpenCV学习笔记(二十七)——基于级联分类器的目标检测objdect OpenCV学习笔记(二十八)——光流法对运动目标跟踪Video Ope
- 视频目标检测跟踪--Detect to Track and Track to Detect
- 目标检测-跟踪-分割
- 目标检测、跟踪和图像检索 数据库
- 运动目标检测与跟踪常用算法
- 目标检测、跟踪、语意分割、stereo matching常用网址
- 基于模板的全自动目标检测跟踪系统的设想