【ROS】移动机器人运动控制的层次
2016-11-02 16:46
337 查看
控制一个移动的机器人,可能在不同的层次面进行。
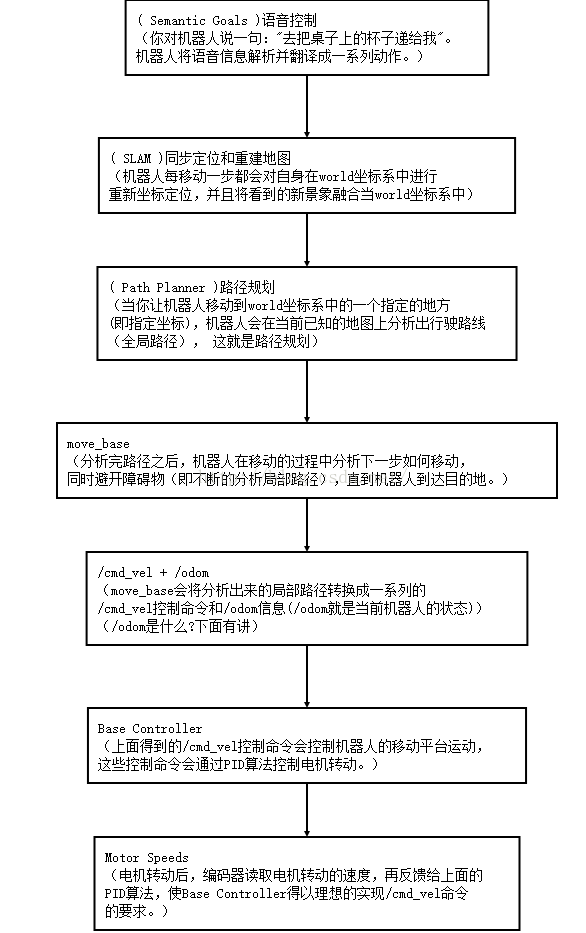
ROS 的控制阶层看起来就是这个样子的:
(从最上层开始)
节选自http://blog.csdn.net/github_35160620/article/details/52514090
ROS 的控制阶层看起来就是这个样子的:
(从最上层开始)
节选自http://blog.csdn.net/github_35160620/article/details/52514090

相关文章推荐
- (二)ROS中控制机器人运动(示例运行)__新的适合自己的进步切入点,跟风榜样
- ROS(indigo)MoveIt!控制ABB RobotStudio 5.6x 6.0x中机器人运动
- (二)ROS中控制机器人运动(示例运行)
- (三)ROS中控制机器人运动的实现(在gazebo中显示)
- ROS下通过MoveIt控制UR5机器人的运动
- ROS(indigo)MoveIt!控制ABB RobotStudio 5.6x 6.0x中机器人运动
- ROS(indigo)MoveIt!控制ABB RobotStudio 5.6x 6.0x中机器人运动
- ROS(indigo) 用于机器人控制的图形化编程工具--code_it robot_blockly
- 基于ROS平台的移动机器人-4-通过ROS利用键盘控制小车移动
- ROS机器人Diego 1#制作(十四)机械臂的控制---arduino驱动
- 【转】移动机器人控制软件的设计与实现
- ROS中用Twist消息控制机器人
- ROS(indigo) 用于机器人控制的图形化编程工具--code_it robot_blockly
- 小强ROS机器人教程(10)___使用kinect进行自主移动避障
- 基于BBB的4轮移动轮式机器人系统设计与实现(七)-- 遥控手柄 控制 类
- ROS(一):如何移动你的机器人
- ROS(indigo)国外开源示例包括多机器人控制等基于V-Rep和Gazebo的仿真
- ROS(indigo) 用于机器人控制的图形化编程工具--code_it robot_blockly
- 【笔记】ROSjava-android控制ROS机器人——ROSjava与ROS构建的机器人设计综述
- 如何利用ROS MoveIt快速搭建机器人运动规划平台?