图像坐标系、摄像机坐标系与世界坐标系
2016-10-24 23:02
246 查看
位姿
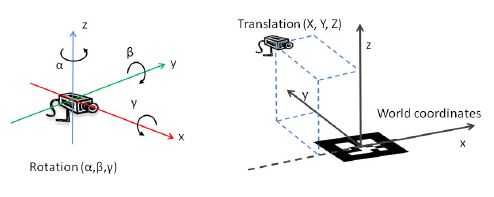
位姿是指一个物体的位置和方向(The pose of an object refers to its location and orientation)。一个物体的位置可以用(x,y,z)来表示。而方向可以用(α,β,γ)来表示,它们是表示围绕三个坐标轴旋转的角度。所以一个位姿有6个自由度,如下图所示:
图像坐标系
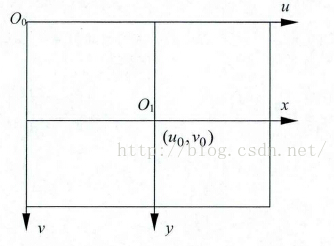
首先,介绍图像坐标系。每幅数字图像在计算机内为M∗N数组,M行N列的图像中的每一个元素(称为像素,pixel)的数值即是图像点的灰度值。如图所示,在图像中定义直角坐标系u,v,每一像素的坐标(u,v)分别是该像素在数组中的列数和行数。所以,(u,v)是以像素为单位的图像坐标系坐标。由于(u,v)只表示像素位于数组中的行数和列数,并没有用物理单位表示出该像素在图像中的位置。所以建立以物理单位(如毫米)表示的图像坐标系的坐标。图像中任意一个像素在这两个坐标的关系为:
{u=XdX+u0v=YdY+v0
用齐次坐标将上式表示为:
⎡⎣⎢uv1⎤⎦⎥=⎡⎣⎢⎢⎢⎢⎢1dX0001dY0u0v01⎤⎦⎥⎥⎥⎥⎥
摄像机坐标系和世界坐标系
由于摄像机可安放在任意位置,在环境中选择一个基准坐标来描述摄像机的位置,并用它描述环境中任何物体的位置,该坐标系称为世界坐标系。摄像机坐标系和世界坐标系之间的关系可以用旋转矩阵R与平移向量 t 来描述。那么,存在如下关系:⎡⎣⎢⎢⎢xyz1⎤⎦⎥⎥⎥=[ROTt1]⎡⎣⎢⎢⎢XwYwZw1⎤⎦⎥⎥⎥
其中,R为 3∗3 矩阵;t 为三维平移向量;O=(0,0,0);
针孔成像模型、相机坐标系与像平面坐标系
空间中任何一点P在图像中的成像位置可以用针孔成像模型近似表示,即任何点P在图像中的投影位置p,为光心 O与P点的连线OP与图像平面的交点。由比例关系有如下关系:⎧⎩⎨X=fxzY=fyz
其中,(X,Y)为p点的图像坐标;(x,y,z)为空间点P在摄像机坐标系下的坐标,f 为xy平面与图像平面的距离,一般称为摄像机的焦距。用齐次坐标和矩阵表示上述投影关系:
s⎡⎣⎢XY1⎤⎦⎥=⎡⎣⎢f000f0001000⎤⎦⎥⎡⎣⎢⎢⎢xyz1⎤⎦⎥⎥⎥=P⎡⎣⎢⎢⎢xyz1⎤⎦⎥⎥⎥
其中,s为一比例因子,P为透视投影矩阵。
综合以上的关系,我们可以得到:
s⎡⎣⎢uv1⎤⎦⎥=⎡⎣⎢⎢⎢⎢⎢1dX0001dY0u0v01⎤⎦⎥⎥⎥⎥⎥⎡⎣⎢f000f0001000⎤⎦⎥[ROTt1]⎡⎣⎢⎢⎢XwYwZw1⎤⎦⎥⎥⎥
从而可以得到:
s⎡⎣⎢uv1⎤⎦⎥=⎡⎣⎢αx000αy0u0v01000⎤⎦⎥[ROTt1]⎡⎣⎢⎢⎢XwYwZw1⎤⎦⎥⎥⎥=M1M2Xw=MXw
其中,α=fdX为 u轴上尺度因子,或称为u轴上归一化焦距;α=fdY为 v轴上尺度因子,或称为v轴上归一化焦距;M为3∗3矩阵,称为投影矩阵;M1由αx,αy,u0,v0决定,由于αx,αy,u0,v0只与摄像机内部参数有关,称这些参数为内部参数;M2由摄像机相对于世界坐标系的方位决定,称为摄像机外部参数。

相关文章推荐
- 图像坐标系、摄像机坐标系与世界坐标系的关系
- 图像坐标系转世界坐标系的方法
- 世界坐标系与摄像机坐标系的变换
- 相机针孔模型----从世界坐标系,到相机坐标系,再到图像物理坐标系,最后到图像像素坐标系的转换过程解析
- 世界坐标系和相机坐标系,图像坐标系的关系
- [图像]摄像机坐标系转换及张正友标定
- 世界坐标系和相机坐标系,图像坐标系的关系
- 摄像机标定04_从单幅图像中提取世界坐标
- Kienct与Arduino学习笔记(2) 深度图像和真实世界坐标系中的深度图
- 世界坐标系和相机坐标系,图像坐标系的关系
- 图像坐标系、世界坐标系
- u3d之世界坐标系,屏幕坐标系,视口坐标系,如何获取物体距离摄像机的距离
- 世界坐标系,相机坐标系,图像坐标系,像素坐标系转换
- 世界坐标系和相机坐标系,图像坐标系的关系
- 世界坐标系和相机坐标系,图像坐标系的关系
- 计算机视觉:相机成像原理:世界坐标系、相机坐标系、图像坐标系、像素坐标系之间的转换
- 计算机视觉:相机成像原理:世界坐标系、相机坐标系、图像坐标系、像素坐标系之间的转换
- 世界坐标系和相机坐标系,图像坐标系的关系
- [图像]摄像机相关四个坐标系(转载)
- [图像]摄像机标定(1) 标定中的四个坐标系