创建简单的机器人smartcar进行仿真
2016-10-18 10:16
645 查看
indigo版本:
使用smartcar机器人在rviz中进行仿真
urdf相关工具安装:
1.安装urdf_tutorial,可以使用其中的例子
2.安装liburdfdom-tools,提供对urdf文件的检查
3.安装机器人模拟器
rviz是一个显示机器人实体的工具,本身不具有模拟的功能,需要安装一个模拟器arbotix。
用下面链接下载机器人smartcar运行文件,并放入工作空间src文件夹下
下载链接:
代码的内容主要是机器人smartcar的urdf文件,和已经运行使用的launch文件,大家下载后可以直接编译使用,由于代码在我的计算机上编译时带有路径信息,所以大家编译的时候请使用下面的命令先清除再编译
用catkin编译:
仿真
首先运行lanuch,就可以看到rviz中的机器人:
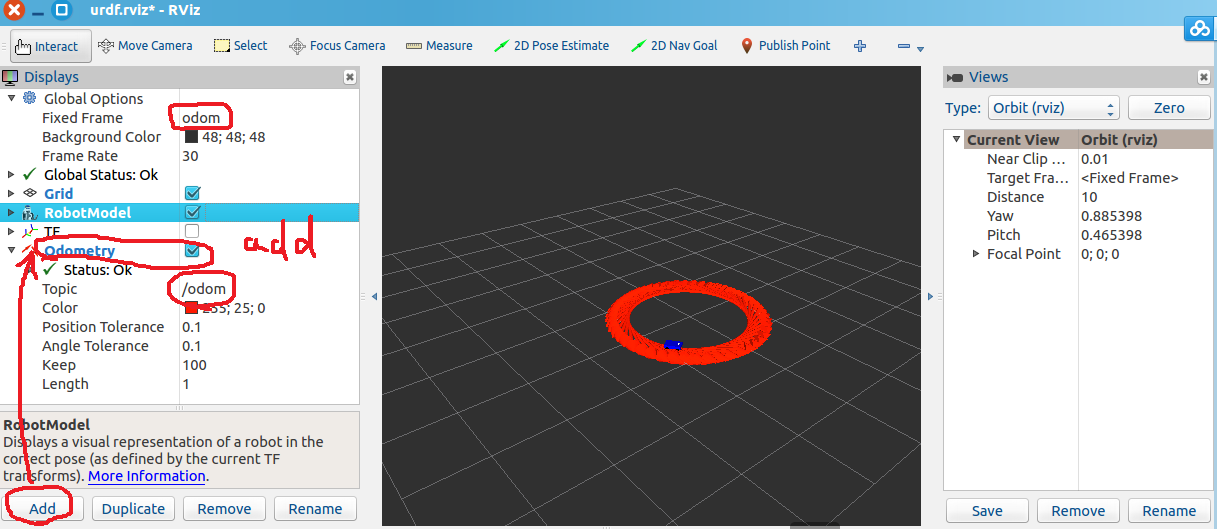
发布一条动作的消息:
注意图片左侧相关参数配置
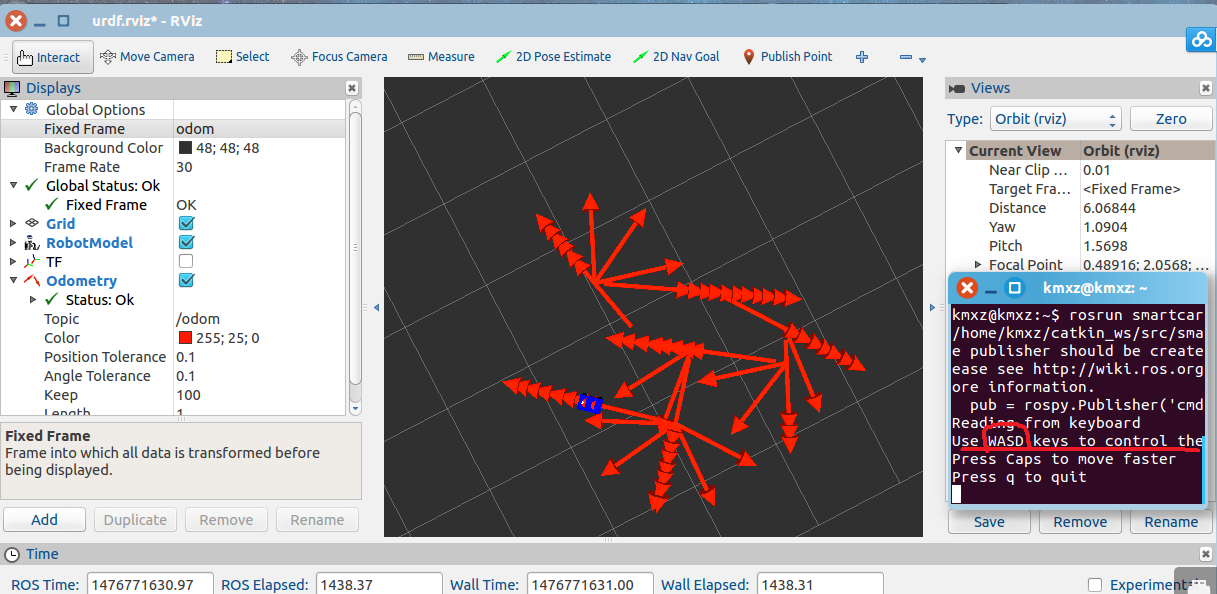
键盘控制:
保持运行之前的smartcar机器人,在rviz中进行显示,然后新建终端,输入如下命令:
在终端中按下键盘里的“W”、“S”、“D”、“A”以及“Shift”键(加速)进行机器人的控制。效果如下图:
使用smartcar机器人在rviz中进行仿真
urdf相关工具安装:
1.安装urdf_tutorial,可以使用其中的例子
sudo apt-get install ros-indigo-urdf-tutorial
2.安装liburdfdom-tools,提供对urdf文件的检查
sudo apt-get install ros-indigo-urdf-tutorial
3.安装机器人模拟器
rviz是一个显示机器人实体的工具,本身不具有模拟的功能,需要安装一个模拟器arbotix。
sudo apt-get install ros-indigo-arbotix
用下面链接下载机器人smartcar运行文件,并放入工作空间src文件夹下
下载链接:
http://file.ncnynl.com/ros/smartcar_description_indigo_ncnynl.com.tar.gz
代码的内容主要是机器人smartcar的urdf文件,和已经运行使用的launch文件,大家下载后可以直接编译使用,由于代码在我的计算机上编译时带有路径信息,所以大家编译的时候请使用下面的命令先清除再编译
rosmake smartcar_description --pre-clean
用catkin编译:
cd ~/catkin_ws/ catkin_make
仿真
首先运行lanuch,就可以看到rviz中的机器人:
roslaunch smartcar_description smartcar_display.rviz.launch
发布一条动作的消息:
rostopic pub -r 10 /cmd_vel geometry_msgs/Twist '{linear: {x: 0.5, y: 0, z: 0}, angular: {x: 0, y: 0, z: 0.5}}'注意图片左侧相关参数配置
键盘控制:
http://file.ncnynl.com/ros/smartcar_teleop.zip //下载
保持运行之前的smartcar机器人,在rviz中进行显示,然后新建终端,输入如下命令:
rosrun smartcar_teleop teleop.py
在终端中按下键盘里的“W”、“S”、“D”、“A”以及“Shift”键(加速)进行机器人的控制。效果如下图:

相关文章推荐
- ROS探索总结(四)(五)(六)——简单的机器人仿真 创建简单的机器人模型smartcar 使用smartcar进行仿真
- ROS探索总结(五)——创建简单的机器人模型smartcar
- ROS(五):创建简单的机器人模型smartcar(indigo版本)
- 关于参考古月《ROS探索总结(五)——创建简单的机器人模型smartcar》在kinetic中实现总结
- 创建简单的机器人模型smartcar
- ROS探索总结(五)——创建简单的机器人模型smartcar
- ROS探索总结(五)——创建简单的机器人模型smartcar
- ROS探索总结(五)——创建简单的机器人模型smartcar
- ROS探索总结(六)——使用smartcar进行仿真
- "Android下使用HttpUrlConntion"进行最简单的get,post请求(包括创建服务器)
- [置顶] ROS探索总结(六)——使用smartcar进行仿真
- ROS探索总结(四)——简单的机器人仿真
- 使用Java在本地创建一个服务器 ,通过浏览器对其进行访问的一个简单测试
- ROS学习(1)使用URDF创建机器人3D仿真模型
- ROS 模拟激光仿真数据 使用stage进行仿真 在stage中控制两个机器人
- 创建单机版的都市圈 --对都市圈进行简单的技术分析
- (古月居)ROS探索总结(六)使用smartcar进行仿真使用smartcar进行仿真——INDIGO版修正
- ROS探索总结(四)——简单的机器人仿真(by古月)学习遇到的问题
- ROS探索总结(四)——简单的机器人仿真
- ROS环境下进行package的简单创建并编译